一种声光驱鸟器、驱鸟方法、终端及存储介质与流程
1.本发明属于输电线路驱鸟技术领域,具体涉及一种声光驱鸟器、驱鸟方法、终端及存储介质。
背景技术:
2.随着社会的电气化发展,居民及企业用户对供电可靠性的要求越来越高,而输电线路跳闸会大大降低供电的可靠性,如何降低跳闸率则至关重要。而造成跳闸的原因多种多样,其中鸟患是引起跳闸的重要原因。在输电线路上设置驱鸟器就显得尤为重要。
3.目前应用的驱鸟器主要分为风力驱鸟器及鸟刺。风力驱鸟器受自然环境影响大,存在无风不转及时间长久转动不灵活现象,再加上鸟类应激性反应,对风力驱鸟器已不再敏感,驱鸟效果已不明显;鸟刺对鸟类存在极大的伤害,虽然能防止鸟类筑巢,但鸟类停落时容易被刺伤甚至被刺死,破坏生态环境;现有的复杂设备在后期清理或更换时也极不方便,此为现有技术的不足之处。有鉴于此,本发明提供一种声光驱鸟器、驱鸟方法、终端及存储介质;以解决现有技术中存在的上述缺陷,是非常有必要的。
技术实现要素:
4.本发明的目的在于,针对现有技术中存在传统的驱鸟装置驱鸟效果不明显,且破坏生态生态环境的缺陷,提供设计一种声光驱鸟器、驱鸟方法、终端及存储介质,以解决现有技术中存在的问题。
5.为实现上述目的,本发明给出以下技术方案:
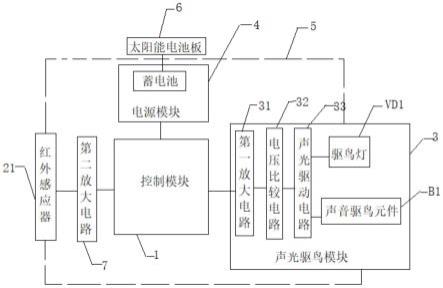
6.第一方面,本发明提供一种声光驱鸟器,包括控制模块、感应模块、声光驱鸟模块和用于向整个驱鸟器供电的电源模块;
7.所述声光驱鸟模块包括第一放大电路、电压比较电路、声光驱动电路、声音驱鸟元件b1和驱鸟灯vd1;
8.所述感应模块通过第二放大电路连接到控制模块的输入端,将感应模块感应到的鸟的状态发送至控制模块进行处理;控制模块的输出端依次通过第一放大电路、电压比较电路和声光驱动电路驱动连接到声音驱鸟元件b1和驱鸟灯vd1,根据处理结果启动声音驱鸟元件b1和驱鸟灯vd1进行驱鸟。
9.在其中一个实施例中,所述第一放大电路包括电阻r1、可变电阻r2、电容c1、电容c2、电容c3、电阻r3、电阻r4、电阻r5、第一放大器u1、可变电阻r6、电容c6、电阻r7、电容c7、可变电阻r8、电容c8、电阻r9、电阻r10、电阻r11、可变电阻r12、电容c9、电容c10、第二放大器u2和电阻r13;
10.电阻r1的第一端、电容c1的第一端和可变电阻r2的第一端均连接到控制模块的输出端,电阻r1的第二端连接到第一放大器u1的反相输入端、电容c2的第一端和电阻r3的第一端,电容c1的第二端连接到第一放大器u1的正向输入端,可变电阻r2的第二端通过电容c3接地,可变电阻r2的滑动端连接到可变电阻r2的第二端,电容c2的第二端通过电阻r4连
接到第一放大器u1的输出端,电阻r3的第二端连接到第一放大器u1的输出端,第一放大器u1的同相输入端还连接到电容c4的第一端和电阻r5的第一端,电容c4的第二端接地,电阻r5的第二端通过电容c5接地,第一放大器u1的输出端还连接到可变电阻r6的第一端,可变电阻r6的第二端接地,可变电阻r6的滑动端通过电容c6连接到电阻r7的第一端,电阻r7的第二端连接到电容c7的第一端和可变电阻r8的第一端,电容c7的第二端连接到可变电阻r8的滑动端,可变电阻r8的第二端通过电容c8连接到可变电阻r8的滑动端,可变电阻r8的第二端通过电阻r9连接到电容c9的第一端,可变电阻r8的滑动端通过串联的电阻r10和电阻r11连接到可变电阻r12的滑动端,可变电阻r12的第一端连接到电容c9的第二端,可变电阻r12的第二端通过电容c10连接到电阻r7的第一端,可变电阻r12的滑动端还连接到第二放大器u2的反向输入端,第二放大器u2的正向输入端通过电阻r13接地,第二放大器u2的输出端连接到电容c9的第一端和电压比较电路。
11.在其中一个实施例中,所述电压比较电路包括电容c11、电阻r14、电阻r15、二极管d1、可变电阻r16、电阻r17、第一比较器u3、电阻r18、二极管d2、电阻r19、电阻r20、电容c12、电阻r21和第二比较器u4;
12.电容c11的第一端连接到第二放大器u2的输出端,电容c11的第二端通过电阻r14接地,电容c11的第二端还连接到第一比较器u3的反向输入端,第一比较器u3的正向输入端连接到电阻r15的第一端和可变电阻r16的第一端电阻r15的第二端连接到电阻r17的第一端和二极管d1的正极,二极管d1的负极接地,电阻r17的第二端连接到电源模块,可变电阻r16的第二端接地,第一比较器u3的输出端通过电阻r18连接到电源模块,第一比较器u3的输出端连接到二极管d2的负极,二极管d2的正极连接到第二比较器u4的反相输入端、电阻r19的第一端和电容c12的第一端,电阻r19的第二端连接到电源模块,电容c12的第二端接地,第二比较器u4的正向输入端通过电阻r20连接到电源模块,第二比较器u4的正向输入端通过电阻r21接地,第二比较器u4的输出端连接到声光驱动电路。
13.在其中一个实施例中,所述声光驱动电路包括电阻r22、三极管q1、电阻r23、电阻r24和电容c13;
14.电阻r22的第一端连接到第二比较器u4的输出端,电阻r22的第一端通过电阻r23连接到电源模块,电阻r22的第二端连接到三极管q1的基极和驱鸟灯vd1的正极,驱鸟灯vd1的负极通过电阻r24接地,三极管q1的发射极接地,三极管q1的集电极连接到声音驱鸟元件b1的第一端,声音驱鸟元件b1的第二端连接到电源模块,声音驱鸟元件b1的第二端通过电容c13接地。
15.在其中一个实施例中,所述第二放大电路包括电容c14、电阻r25、电阻r26、三极管q2、电阻r27、电阻r28、电容c15、电阻r29、第三放大器u5、电阻r30、电容c16和电容c17;
16.电容c14的第一端连接到感应器,电容c14的第二端通过电阻r25连接到电阻r26、电容c15的第一端和三极管q2的集电极,电容c14的第二端还连接到三极管q2的基极,三极管q2的发射极接地,电阻r26的第二端连接到电源模块,电容c15的第二端通过电阻r27连接到第三放大器u5的正向输入端,第三放大器u5的正向输入端通过电阻r28连接到电源模块,第三放大器u5的反向输入端通过串联的电阻r29和电容c16接地,第三放大器u5的反向输入端通过并联的电阻r30和电容c17连接到第三放大器u5的输出端,第三放大器u5的输出端连接到控制模块。
17.在其中一个实施例中,还包括太阳能电池板,所述太阳能电池板安装在壳体的顶端,太阳能电池板与电源模块中的蓄电池连接。
18.在其中一个实施例中,所述感应模块采用红外感应器。
19.第二方面,本发明提供一种基于上述任一项所述的声光驱鸟器的驱鸟方法,包括:
20.根据红外感应器检测目标区域内是否出现鸟类;
21.若是,则判断鸟类的运动方向与预设朝向输电线路的方向是否一致;
22.若是,则驱动声音驱鸟元件b1发出预设驱鸟声音,以及驱动驱鸟灯vd1发光进行驱鸟。
23.第三方面,本发明提供一种终端,包括:
24.处理器;
25.用于存储处理器的执行指令的存储器;
26.其中,所述处理器被配置为执行上述的方法。
27.第四方面,本发明提供一种存储介质,所述存储介质中存储有指令,当其在计算机上运行时,使得计算机执行如上述的方法。
28.本发明的有益效果在于,本发明通过红外感应器感应鸟类在目标区域内的运动情况,并在感应到鸟类朝向输电线路的方向移动时,控制器通过第一放大电路、电压比较电路和声光驱动电路驱动声音驱鸟元件b1和驱鸟灯vd1进行声光驱鸟,该驱鸟器受自然环境影响较小,且能够24小时不间断运行,减少了跳闸次数,提高了输电线路的运行稳定性。
29.此外,本发明设计原理可靠,结构简单,具有非常广泛的应用前景。
30.由此可见,本发明与现有技术相比,具有突出的实质性特点和显著地进步,其实施的有益效果也是显而易见的。
附图说明
31.图1为声光驱鸟器的关系示意图。
32.图2为第一放大电路的原理图。
33.图3为电压比较电路的原理图。
34.图4为声光驱动电路的原理图。
35.图5为第二放大电路的原理图。
36.图6为驱动方法的流程示意图。
37.1为控制模块,21为红外感应器,3为声光驱鸟模块,31为第一放大电路,32为电压比较电路,33为声光驱动电路,4为电源模块,5为壳体,6为太阳能电池板,7为第二放大电路。
具体实施方式
38.下面结合附图并通过具体实施例对本发明进行详细阐述,以下实施例是对本发明的解释,而本发明并不局限于以下实施方式。
39.如图1所示,本发明提供一种声光驱鸟器,该声光驱鸟器包括控制模块、感应模块、声光驱鸟模块和用于向整个驱鸟器供电的电源模块;其中,感应模块采用红外感应器,声光驱鸟模块包括第一放大电路、电压比较电路、声光驱动电路、声音驱鸟元件b1和驱鸟灯vd1;
具体地,感应模块通过第二放大电路连接到控制模块的输入端,将感应模块感应到的鸟的状态发送至控制模块进行处理;控制模块的输出端依次通过第一放大电路、电压比较电路和声光驱动电路驱动连接到声音驱鸟元件b1和驱鸟灯vd1,根据处理结果启动声音驱鸟元件b1和驱鸟灯vd1进行驱鸟。
40.另外,该声光驱鸟器还包括壳体和太阳能电池板,红外感应器、声音驱鸟元件b1和驱鸟灯vd1均设置在壳体上,控制模块、电源模块、第一放大电路、电压比较电路、声光驱动电路和第二放大电路均设置在壳体内,太阳能电池板安装在壳体的顶端,太阳能电池板与电源模块中的蓄电池连接。
41.如图2所示,第一放大电路包括电阻r1、可变电阻r2、电容c1、电容c2、电容c3、电阻r3、电阻r4、电阻r5、第一放大器u1、可变电阻r6、电容c6、电阻r7、电容c7、可变电阻r8、电容c8、电阻r9、电阻r10、电阻r11、可变电阻r12、电容c9、电容c10、第二放大器u2和电阻r13;电阻r1的第一端、电容c1的第一端和可变电阻r2的第一端均连接到控制模块的输出端,电阻r1的第二端连接到第一放大器u1的反相输入端、电容c2的第一端和电阻r3的第一端,电容c1的第二端连接到第一放大器u1的正向输入端,可变电阻r2的第二端通过电容c3接地,可变电阻r2的滑动端连接到可变电阻r2的第二端,电容c2的第二端通过电阻r4连接到第一放大器u1的输出端,电阻r3的第二端连接到第一放大器u1的输出端,第一放大器u1的同相输入端还连接到电容c4的第一端和电阻r5的第一端,电容c4的第二端接地,电阻r5的第二端通过电容c5接地,第一放大器u1的输出端还连接到可变电阻r6的第一端,可变电阻r6的第二端接地,可变电阻r6的滑动端通过电容c6连接到电阻r7的第一端,电阻r7的第二端连接到电容c7的第一端和可变电阻r8的第一端,电容c7的第二端连接到可变电阻r8的滑动端,可变电阻r8的第二端通过电容c8连接到可变电阻r8的滑动端,可变电阻r8的第二端通过电阻r9连接到电容c9的第一端,可变电阻r8的滑动端通过串联的电阻r10和电阻r11连接到可变电阻r12的滑动端,可变电阻r12的第一端连接到电容c9的第二端,可变电阻r12的第二端通过电容c10连接到电阻r7的第一端,可变电阻r12的滑动端还连接到第二放大器u2的反向输入端,第二放大器u2的正向输入端通过电阻r13接地,第二放大器u2的输出端连接到电容c9的第一端和电压比较电路。
42.如图3所示,电压比较电路包括电容c11、电阻r14、电阻r15、二极管d1、可变电阻r16、电阻r17、第一比较器u3、电阻r18、二极管d2、电阻r19、电阻r20、电容c12、电阻r21和第二比较器u4;电容c11的第一端连接到第二放大器u2的输出端,电容c11的第二端通过电阻r14接地,电容c11的第二端还连接到第一比较器u3的反向输入端,第一比较器u3的正向输入端连接到电阻r15的第一端和可变电阻r16的第一端电阻r15的第二端连接到电阻r17的第一端和二极管d1的正极,二极管d1的负极接地,电阻r17的第二端连接到电源模块,可变电阻r16的第二端接地,第一比较器u3的输出端通过电阻r18连接到电源模块,第一比较器u3的输出端连接到二极管d2的负极,二极管d2的正极连接到第二比较器u4的反相输入端、电阻r19的第一端和电容c12的第一端,电阻r19的第二端连接到电源模块,电容c12的第二端接地,第二比较器u4的正向输入端通过电阻r20连接到电源模块,第二比较器u4的正向输入端通过电阻r21接地,第二比较器u4的输出端连接到声光驱动电路;第一比较器u3的两输入端进行电压比较,当第一放大电路输出的电压信号到达第一比较器u3反相输入端时,第一放大电路输出的电压信号与电阻r27和二极管d1产生的第一基准电压作比较,第一比较
器u3输出低电平,电阻r19和电容c12组成声光延时电路,延时预设时间,当第一比较器u3输出低电平时,电容c12通过二极管d2进行放电,此时第二比较器u4的反向输入端为低电平,并与第二比较器u4的正向输入端提供的第二基准电压相比较,当第二比较器u4的反向输入端输入的电压信号低于第二基准电压时第二比较器u4的输出端输出高电平,触发驱鸟灯vd1进行驱鸟,以及三极管q1导通,触发声音驱鸟元件b1进行声音驱鸟。
43.如图4所示,声光驱动电路包括电阻r22、三极管q1、电阻r23、电阻r24和电容c13;电阻r22的第一端连接到第二比较器u4的输出端,电阻r22的第一端通过电阻r23连接到电源模块,电阻r22的第二端连接到三极管q1的基极和驱鸟灯vd1的正极,驱鸟灯vd1的负极通过电阻r24接地,三极管q1的发射极接地,三极管q1的集电极连接到声音驱鸟元件b1的第一端,声音驱鸟元件b1的第二端连接到电源模块,声音驱鸟元件b1的第二端通过电容c13接地。
44.如图5所示,第二放大电路包括电容c14、电阻r25、电阻r26、三极管q2、电阻r27、电阻r28、电容c15、电阻r29、第三放大器u5、电阻r30、电容c16和电容c17;电容c14的第一端连接到感应器,电容c14的第二端通过电阻r25连接到电阻r26、电容c15的第一端和三极管q2的集电极,电容c14的第二端还连接到三极管q2的基极,三极管q2的发射极接地,电阻r26的第二端连接到电源模块,电容c15的第二端通过电阻r27连接到第三放大器u5的正向输入端,第三放大器u5的正向输入端通过电阻r28连接到电源模块,第三放大器u5的反向输入端通过串联的电阻r29和电容c16接地,第三放大器u5的反向输入端通过并联的电阻r30和电容c17连接到第三放大器u5的输出端,第三放大器u5的输出端连接到控制模块。
45.如图6所示,本发明提供一种基于上述任一项所述的声光驱鸟器的驱鸟方法,包括:
46.s1、根据红外感应器检测目标区域内是否出现鸟类;
47.s2、若是,则判断鸟类的运动方向与预设朝向输电线路的方向是否一致;
48.s3、若是,则驱动声音驱鸟元件b1发出预设驱鸟声音,以及驱动驱鸟灯vd1发光进行驱鸟。
49.本发明提供一种终端,包括:
50.处理器;
51.用于存储处理器的执行指令的存储器;
52.其中,所述处理器被配置为执行上述的方法。
53.本发明提供一种存储介质,所述存储介质中存储有指令,当其在计算机上运行时,使得计算机执行如上述的方法。
54.以上公开的仅为本发明的优选实施方式,但本发明并非局限于此,任何本领域的技术人员能思之的没有创造性的变化,以及在不脱离本发明原理前提下所作的若干改进和润饰,都应落在本发明的保护范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1