一种葛种植深旋高垄旋耕起垄机的制作方法
1.本发明涉及农业机械技术领域,具体为一种葛种植深旋高垄旋耕起垄机。
背景技术:
2.葛:豆科,葛属多年生草质藤本植物,块根肥厚圆柱状,叶互生,项生叶片菱状卵圆形,总状花序,腋生,蝶形花冠,紫红色。荚果长条形,扁平,密被黄褐色硬毛。7-8月开花,8-10月结果。
3.葛种植起垄高度需要达到50cm以上,才能满足的葛的生长需要,现有的甘薯、马铃薯、木薯、烟草等其他产业使用的旋耕起垄机,其起垄高度最多只能达到40cm,不能用于葛的旋耕起垄作业,同时现有的旋耕起垄机耕出的地垄宽度也多为固定尺寸,不利于不同地形葛的种植,使装置的适用范围受到局限。
技术实现要素:
4.本发明的目的是针对背景技术中存在的缺点和问题加以改进和创新,提供一种葛种植深旋高垄旋耕起垄机。
5.实现上述目的,本发明提供如下技术方案:一种葛种植深旋高垄旋耕起垄机,包括机架,所述机架下端转动连接有旋耕轴,所述旋转轴由驱动机构驱动旋转,所述旋耕轴上安装有沿着旋耕轴中轴线排列的若干圆盘,所述圆盘边缘处环形分布有若干旋耕刀,且相邻的旋耕刀分布设置于圆盘的两侧,所述机架后端固定连接有固定臂,所述固定臂之间转动连接有连接轴,所述连接轴上套设有滚动体,所述滚动体为圆锥体,滚动体内侧设置有固定机构,所述固定机构用于将滚动体和连接轴固定在一起。
6.由上述技术方案可见,通过设置圆盘,增大了旋耕刀的旋转半径,从而加大了旋耕刀的旋耕深度,满足了葛种植深旋耕的作业要求,且旋耕刀位于圆盘的两侧,使得圆盘受力更加均匀,由于滚动体套设在连接轴上,使得滚动体可以沿着连接轴的中轴线滑动,从而调节滚动体之间的间距,达到调节垄宽的目的。
7.进一步的方案是,所述固定机构包括安装在滚动体内侧的固定杆,所述固定杆内部通过开设凹槽插设有活动杆,所述活动杆与凹槽底壁之间设置有弹簧,所述连接轴外表面等距离开设有若干第一限位孔,所述活动杆远离滚动体内壁的一端插入第一限位孔,所述固定杆沿着连接轴中轴线环形阵列分布。
8.由上述技术方案可见,当活动杆插入第一限位孔后,滚动体和连接轴固定连接在一起,便于对土壤起垄成型,当活动杆脱离第一限位孔后,便于调节滚动体在连接轴上的位置。
9.进一步的方案是,所述固定杆两侧安装有第二固定板,所述第二固定板上开设有第二限位孔,固定杆侧壁上开设有通槽,所述通槽内滑动配合有连接杆,所述连接杆两端分别固定连接活动杆和移动板,所述移动板两端螺纹连接有固定螺杆,所述固定螺杆底端用于插入第二限位孔。
10.由上述技术方案可见,通过手持移动板,能够方便调节活动杆伸出固定杆的长度,从而便于活动杆与第一限位孔相互配合,当活动杆位置调节完毕后,通过固定螺杆和第二限位孔的相互配合,便于将活动杆位置固定住,进而避免了在调节滚动体位置过程中活动杆在弹簧的作用下抵住连接轴。
11.进一步的方案是,所述驱动机构包括安装在机架上表面的密封框,所述密封框顶壁安装有发动机,所述发动机的输出端固定连接有第一输出轴,所述第一输出轴上安装有第一小齿轮和第一大齿轮,所述密封框侧壁转动连接有第二输出轴,所述第二输出轴上套设有滑套,所述滑套外表面安装有第二大齿轮和第二小齿轮,所述滑套在移动机构的驱动下沿着第二输出轴的中轴线运动,从而带动第一小齿轮与第二大齿轮啮合连接或者第二小齿轮与第一大齿轮啮合连接,第二输出轴通过传动机构带动旋耕轴旋转。
12.由上述技术方案可见,当第一大齿轮和第二小齿轮啮合连接,能够提高旋耕轴的转速,加快旋耕速度,适用于松软的土质;当土质较为坚实,通过移动机构驱动滑套运动,使得第二大齿轮和第一小齿轮啮合连接,旋耕轴输出大扭矩,提高旋耕质量,大大提高了装置的旋耕效率和适用性。
13.进一步的方案是,所述移动机构包括安装在第二输出轴上的第一固定板,所述第一固定板上安装有第一电动伸缩杆,所述滑套上固定连接有固定块,所述第一电动伸缩杆的伸缩端与固定块固定连接,所述第一固定板上还安装有用于给第一电动伸缩杆供电的电源。
14.由上述技术方案可见,通过第一电动伸缩杆伸缩,能够方便带动滑套沿着第二输出轴的中轴线运动。
15.进一步的方案是,所述滑套内表面开设有条形槽,所述第二输出轴外表面安装有与条形槽相适配的限位条。
16.由上述技术方案可见,通过限位条和条形槽的相互配合,方便滑套带动第二输出轴旋转,避免了滑套通过第一电动伸缩杆带动第二输出轴旋转,避免第一电动伸缩杆长期承受扭矩。
17.进一步的方案是,所述机架下表面还安装有第二电动伸缩杆,所述第二电动伸缩杆的伸缩端固定连接有土壤湿度传感器。
18.进一步的方案是,所述滚动体上安装的固定杆的数量有四根。
19.进一步的方案是,所述传动机构包括传动框,所述传动框内分别设置有主动链轮和从动链轮,主动链轮通过链条和从动链轮传动连接,所述主动链轮和从动链轮分别安装在第二输出轴和旋耕轴上。
20.进一步的方案是,所述圆盘的数量有九块。
21.与现有技术相比,本发明的有益效果是:本发明通过滚动体、固定杆、活动杆、弹簧、第一限位孔和连接轴的相互配合,便于调节调节滚动体在连接轴上的位置,从而方便调节滚动体之间的间距,达到调节垄宽的目的;通过改变齿轮相互之间的啮合连接,起到调节旋耕轴转速和扭矩的目的,适用于不同土质的旋耕操作,提高了旋耕机的旋耕效率和适用性。
附图说明
22.为了更清楚地说明本发明实施例的技术方案,下面将对实施例中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
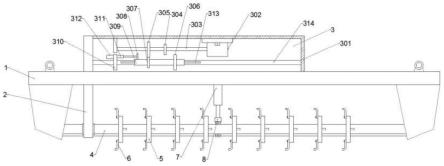
23.图1是本发明主视结构示意图;
24.图2是本发明俯视结构示意图;
25.图3是本发明滚动体侧视结构示意图;
26.图4是本发明固定机构结构示意图;
27.图5是本发明固定杆和活动杆剖视结构示意图;
28.图6是本发明圆盘和旋耕刀侧视结构示意图;
29.附图标记:机架1、传动框2、驱动机构3、密封框301、发动机302、第一输出轴303、第一小齿轮304、第一大齿轮305、第二大齿轮306、第二小齿轮307、固定块308、滑套309、第一固定板310、第一电动伸缩杆311、电源312、限位条313、第二输出轴314、旋耕轴4、圆盘5、旋耕刀6、第二电动伸缩杆7、土壤湿度传感器8、固定臂9、连接轴10、滚动体11、固定机构12、固定杆121、第二固定板122、第二限位孔123、通槽124、移动板125、固定螺杆126、活动杆127、连接杆128、凹槽129、弹簧130、第一限位孔13。
具体实施方式
30.为使本发明的目的、特征和优点能够更加明显易懂,下面结合附图对本发明的具体实施方式做详细的说明。
31.需要说明的是,当元件被称为“固定于”另一个元件,它可以直接在另一个元件上或者也可以存在居中的元件。当一个元件被认为是“连接”另一个元件,它可以是直接连接到另一个元件或者可能同时存在居中元件。
32.除非另有定义,本文所使用的所有的技术和科学术语与属于本发明的技术领域的技术人员通常理解的含义相同。本文中在本发明的说明书中所使用的术语只是为了描述具体的实施方式的目的,不是旨在于限制本发明。本文所使用的术语“及/或”包括一个或多个相关的所列项目的任意的和所有的组合。
33.一种葛种植深旋高垄旋耕起垄机,包括机架1,机架1下端转动连接有旋耕轴4,旋转轴4由驱动机构3驱动旋转,旋耕轴4上安装有沿着旋耕轴4排列的若干圆盘5,圆盘5边缘处环形分布有若干旋耕刀6,且相邻的旋耕刀6分布设置于圆盘5的两侧,机架1后端固定连接有固定臂9,固定臂9之间转动连接有连接轴10,连接轴10上套设有滚动体11,滚动体11为圆锥体,滚动体11内侧设置有固定机构12,固定机构12用于将滚动体11和连接轴10固定在一起。
34.固定机构12包括安装在滚动体11内侧的固定杆121,固定杆121内部通过开设凹槽129插设有活动杆127,活动杆127与凹槽129底壁之间设置有弹簧130,连接轴10外表面等距离开设有若干第一限位孔13,活动杆127远离滚动体11内壁的一端插入第一限位孔13,且固定杆121沿着连接轴10中轴线环形阵列分布。
35.固定杆121两侧安装有第二固定板122,第二固定板122上开设有第二限位孔123,固定杆121侧壁上开设有通槽124,通槽124内滑动配合有连接杆128,连接杆128两端分别固
定连接活动杆127和移动板125,移动板125两端螺纹连接有固定螺杆126,固定螺杆126底端用于插入第二限位孔123。
36.驱动机构3包括安装在机架1上表面的密封框301,密封框301顶壁安装有发动机302,发动机302的输出端固定连接有第一输出轴303,第一输出轴303上安装有第一小齿轮304和第一大齿轮305,密封框301侧壁转动连接有第二输出轴314,第二输出轴314上套设有滑套309,滑套309外表面安装有第二大齿轮306和第二小齿轮307,滑套309在移动机构的驱动下沿着第二输出轴314的中轴线运动,从而带动第一小齿轮304与第二大齿轮306啮合连接或者第二小齿轮307与第一大齿轮305啮合连接,第二输出轴314通过传动机构带动旋耕轴4旋转。
37.移动机构包括安装在第二输出轴314上的第一固定板310,第一固底板310上安装有第一电动伸缩杆311,滑套309上固定连接有固定块308,第一电动伸缩杆311的伸缩端与固定块308固定连接,第一固定板310上还安装有用于给第一电动伸缩杆311供电的电源312。滑套309内表面开设有条形槽,第二输出轴314外表面安装有与条形槽相适配的限位条313。
38.机架1下表面还安装有第二电动伸缩杆7,第二电动伸缩杆7的伸缩端固定连接有土壤湿度传感器8,土壤湿度传感器8的型号是brw100,土壤湿度传感器8设置有传感器钢针,通过传感器钢针插入土壤中来检测水分含量,检测到的信号可以通过无线数传模块传递给第一电动伸缩杆311,来控制第一电动伸缩杆311伸缩,无线数传模块包括无线发送模块和无线接受模块,无线发送模块安装在密封框301内壁上,无线接受模块安装第一固定板310。
39.传动机构包括传动框2,传动框2内分别设置有主动链轮和从动链轮,主动链轮通过链条和从动链轮传动连接,主动链轮和从动链轮分别安装在第二输出轴314和旋耕轴4上,主动链轮、从动链轮和链条图中未示出。
40.本发明的工作原理:具体使用时,本发明通过拖拉机牵引该旋耕起垄机,启动发动机302,通过驱动机构3和传动机构的相互配合,发动机302将动力传递给旋耕轴4,从而带动旋耕轴4上的旋耕刀6旋转,旋耕刀对土壤进行旋耕,同时,第二电动伸缩杆7驱动土壤湿度传感器8向下运动,使得土壤湿度传感器8的检测钢针插入土壤中,实时检测土壤中水分,当土壤中水分较高时,表明土质较为松软,第一大齿轮305和第二小齿轮307啮合连接,提高旋耕轴4的转速,加快旋耕速度,当土质较为坚实,通过第一电动伸缩杆311带动滑套309在第二输出轴314上滑动,将第一大齿轮305和第二小齿轮307啮合连接转换为第二大齿轮306和第一小齿轮304啮合连接,提高旋耕轴4的扭矩,提高旋耕质量,最后滚动体11在旋耕后的土壤上滚动,以使土壤起垄成型。
41.在本发明的描述中,需要理解的是,术语“中心”、“纵向”、“横向”、“长度”、“宽度”、“厚度”、“上”、“下”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”、“内”、“外”、“顺时针”、“逆时针”、“轴向”、“径向”、“周向”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对发明的限制。
42.在本说明书的描述中,参考术语“一个实施例”、“一些实施例”、“示意性实施例”、“示例”、“具体示例”、或“一些示例”等的描述意指结合该实施例或示例描述的具体特征、结
构、材料或者特点包含于本发明的至少一个实施例或示例中。在本说明书中,对上述术语的示意性表述不一定指的是相同的实施例或示例。
43.显然,所描述的实施例仅仅是本技术一部分实施例,而不是全部的实施例。在本文中提及“实施例”意味着,结合实施例描述的特定特征、结构或者特性可以包含在本实施例申请的至少一个实施例中。在说明书中的各个位置出现该短语并不一定均是相同的实施例,也不是与其它实施例互斥的独立的或是备选的实施例。本领域技术人员可以显式地和隐式地理解的是,本文所描述的实施例可以与其它实施例相结合。基于本技术中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本技术保护的范围。
44.尽管已经示出和描述了本发明的实施例,本领域的普通技术人员可以理解:在不脱离本发明的原理和宗旨的情况下可以对这些实施例进行多种变化、修改、替换和变型,本发明的范围由权利要求及其等同物限定。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1