一种集采摘-运输-收集于一体的大田西瓜智能收获机
1.本发明属于农业机械领域,涉及一种西瓜收获机,特别是涉及一种集采摘-运输-收集于一体的大田西瓜智能收获机。
背景技术:
2.我国西瓜种植面积与产量巨大,但西瓜的采收作业仍以人工收获为主,缺乏机械化技术,用工量大,劳动强度大,生产成本高,造成西瓜生产效益低,因此,有必要设计一种集采摘-运输-收集于一体的大田西瓜智能收获机。
3.为实现西瓜的自动化收获,中国发明专利“一种基于机器视觉的可分类西瓜收获运输机”(申请号:cn202110985652.5,公开日:2021.11.19)公开了一种基于机器视觉的可分类西瓜收获运输机,包括运输装置、承载机构、链传动机构、驱动机构和视觉装置;所述驱动机构安装在运输装置上,用于驱动链传动机构进行横向移动;所述链传动机构安装在驱动机构上,其一端向运输装置的侧面伸出;所述承载机构安装在链传动机构的上方,由链传动机构提供动力进行回转;所述视觉装置安装在运输装置上。本发明可以一边传送西瓜一边向前运动,收获运输的效率高,而且通过视觉系统对西瓜进行成熟度检测和病害检测,实现精准的分类,分拣质量高。
4.因此,现有技术存在的问题是:需要人工采摘西瓜,并将西瓜放置在承载机构上,无法实现采摘、运输、收集等过程的自动化。
技术实现要素:
5.本发明的目的是针对目前西瓜需要人工采摘,采摘、运输、收集等过程的自动化程度低等问题,提出一种集采摘-运输-收集于一体的大田西瓜智能收获机。
6.本发明的技术方案是:一种集采摘-运输-收集于一体的大田西瓜智能收获机,其特征在于:所述集采摘-运输-收集于一体的大田西瓜智能收获机由移动模块、运输模块、采摘模块和收集箱组成;
7.所述移动模块由移动小车、控制器、电池组和第一摄像头构成;所述控制器通过螺栓固定设置在移动小车上方前侧,所述电池组通过螺栓固定设置在移动小车上方前侧,位于控制器左侧,所述第一摄像头固定设置在移动小车前端;
8.所述运输模块由支撑架、辅助轮、第一外导轨、第一内导轨、连接块、主动轮安装支架、主动轮、第一电机、第一安装支架、从动轮安装支架、从动轮和传动链构成;所述辅助轮通过螺栓安装在支撑架两侧,所述第一内导轨通过螺栓固定设置在支撑架上方,所述第一外导轨通过连接块与第一内导轨固定连接,所述主动轮安装支架通过螺栓固定设置在第一内导轨上方,所述主动轮通过轴承设置在主动轮安装支架上,所述第一安装支架通过螺栓固定设置在第一内导轨上方,所述第一电机通过螺栓固定设置在第一安装支架上,所述第一电机的电机输出轴与主动轮通过键连接,所述从动轮安装支架通过螺栓固定设置在第一内导轨上方,所述从动轮通过轴承设置在从动轮安装支架上,所述传动链通过啮合安装在
主动轮和从动轮上;
9.所述采摘模块由第一滑块、连接杆、第二滑块、滚珠丝杠、第二导轨、第二安装支架、第二电机、第二摄像头、电动夹爪、仿形托举盘、橡胶层和刀片构成;所述第一滑块通过滑动副安装在第一外导轨上,所述连接杆一端固定设置在第一滑块上方,另一端与传动链相连,所述第二滑块通过螺栓固定设置在第一滑块上,所述第二导轨通过滑动副安装在第二滑块上,所述滚珠丝杠通过轴承安装在第二导轨上,所述滚珠丝杠通过螺旋副与第二滑块转动连接,所述第二安装支架通过螺栓固定设置在第二导轨上方,所述第二电机通过螺栓安装在第二安装支架上方,所述第二电机的输出轴通过联轴器与滚珠丝杠固定连接,所述第二摄像头固定安装在第二导轨下方,所述电动夹爪通过螺栓安装在第二导轨下端一侧,所述仿形托举盘通过螺栓安装在电动夹爪的末端夹指上,所述橡胶层通过粘接安装在仿形托举盘下方内侧,所述刀片通过螺栓安装在仿形托举盘下方外侧;
10.所述收集箱放置在移动小车上方后侧,位于控制器和电池组的后方;
11.所述移动模块通过第一摄像头获取的道路信息和西瓜位置信息运动至指定区域;所述采摘模块通过第二摄像头获取西瓜位置信息,所述第一电机通过主动轮和从动轮带动传动链进行移动,所述传动链带动采摘模块移动至西瓜上方,所述仿形托举盘通过电动夹爪张开,所述第二电机驱动滚珠丝杠转动,所述滚珠丝杠带动第二导轨向下移动,所述第二导轨带动电动夹爪移动至西瓜位置,所述仿形托举盘通过电动夹爪闭合,并保留一定间隙,完成对西瓜的包覆;所述电动夹爪带动西瓜向上移动一段距离,西瓜瓜柄在藤蔓牵引力作用下位于仿形托举盘下方,所述仿形托举盘通过电动夹爪带动刀片剪断西瓜瓜柄,完成西瓜的采摘;所述第二电机驱动滚珠丝杠转动,所述滚珠丝杠带动第二导轨向上移动,所述第二导轨带动电动夹爪移动至高于收集箱的位置,所述第一电机通过主动轮和从动轮带动传动链移动,所述传动链带动采摘模块移动至收集箱的上方,完成西瓜的运输;所述第二电机驱动滚珠丝杠转动,所述滚珠丝杠带动第二导轨向下移动,所述第二导轨带动电动夹爪移动至收集箱内部,所述仿形托举盘通过电动夹爪张开,西瓜在重力作用下落入收集箱内,完成西瓜的收集。
12.所述第一外导轨、第一内导轨设有凹槽,且凹槽与第一滑块相配合,用于采摘模块水平移动的导向;所述第一内导轨前端通过支撑架与辅助轮相连,所述第一内导轨后端通过型材与移动小车固定连接。
13.所述从动轮安装支架和从动轮的数量为7个,均安装在第一内导轨上方;所述传动链通过啮合安装在从动轮和主动轮上,所述传动链位于连接块的正下方,以便传动链带动采摘模块水平移动。
14.所述仿形托举盘、橡胶层和刀片的数量为2个,分别对称设置在电动夹爪的两侧末端夹指上;所述仿形托举盘为空心半球形结构,以便实现西瓜的仿形托举;所述刀片为圆弧形结构刀片,以便实现西瓜瓜柄的仿形切割。
15.所述采摘模块的数量为若干个,通过第一滑块设置在第一外导轨和第一内导轨上;所述第一外导轨和第一内导轨组成t字环形导轨,所述采摘模块通过第一滑块相对t字环形导轨作循环水平移动,以便实现西瓜采摘、运输、收集的一体化。
16.所述第二电机驱动滚珠丝杠转动,所述滚珠丝杠带动第二导轨上下移动,所述第二导轨带动电动夹爪上下移动,以便实现采摘模块下降采摘西瓜、采摘模块上升运输西瓜
和采摘模块下降放置西瓜。
17.本发明与现有技术相比,其显著优点为:
18.1、本发明创新设计了t字环形导轨,将西瓜的采摘、运输与收集过程集成于一体,实现了西瓜收获的自动化。
19.2、本发明中的采摘模块在t字环形导轨上的运动范围广,采摘西瓜的区域面积大,适用于大田西瓜收获。
20.3、本发明中的采摘模块数量有若干个,可根据需要进行设置,西瓜的采摘、运输和收集同时进行,收获效率高。
21.4、本发明创新采用了仿形托举盘对西瓜进行包覆、剪切、托举和放置,避免对西瓜的夹持,减小了采摘损伤。
22.5、本发明创新采用滚珠丝杠传动装置,提高采摘模块的承载能力,实现仿形托举盘的上下移动。
附图说明
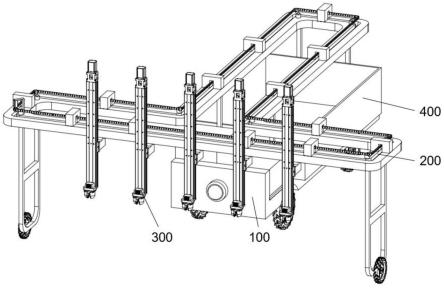
23.图1为本发明整体结构示意图。
24.图2为本发明中移动模块的结构示意图。
25.图3为本发明中运输模块的结构示意图。
26.图4为本发明中采摘模块的结构示意图。
27.图5为本发明中收集箱的结构示意图。
28.图中,移动模块100、运输模块200、采摘模块300、收集箱400、移动小车101、控制器102、电池组103、第一摄像头104、支撑架201、辅助轮202、第一外导轨203、第一内导轨204、连接块205、主动轮安装支架206、主动轮207、第一电机208、第一安装支架209、从动轮安装支架210、从动轮211、传动链212、第一滑块301、连接杆302、第二滑块303、滚珠丝杠304、第二导轨305、第二安装支架306、第二电机307、第二摄像头308、电动夹爪309、仿形托举盘310、橡胶层311、刀片312。
具体实施方式
29.下面结合附图对本发明作进一步说明:
30.如图1所示,一种集采摘-运输-收集于一体的大田西瓜智能收获机,由移动模块100、运输模块200、采摘模块300和收集箱400组成。
31.如图2所示,一种集采摘-运输-收集于一体的大田西瓜智能收获机,移动模块100由移动小车101、控制器102、电池组103和第一摄像头104构成;所述控制器102通过螺栓固定设置在移动小车101上方前侧,所述电池组103通过螺栓固定设置在移动小车101上方前侧,位于控制器102左侧,所述第一摄像头104固定设置在移动小车101前端。
32.如图3所示,一种集采摘-运输-收集于一体的大田西瓜智能收获机,运输模块200由支撑架201、辅助轮202、第一外导轨203、第一内导轨204、连接块205、主动轮安装支架206、主动轮207、第一电机208、第一安装支架209、从动轮安装支架210、从动轮211和传动链212构成;辅助轮202通过螺栓安装在支撑架201两侧,第一内导轨204通过螺栓固定设置在支撑架201上方,第一外导轨203通过连接块205与第一内导轨204固定连接,主动轮安装支
架206通过螺栓固定设置在第一内导轨204上方,主动轮207通过轴承设置在主动轮安装支架206上,第一安装支架209通过螺栓固定设置在第一内导轨204上方,第一电机208通过螺栓固定设置在第一安装支架209上,第一电机208的电机输出轴与主动轮207通过键连接,从动轮安装支架210通过螺栓固定设置在第一内导轨204上方,从动轮211通过轴承设置在从动轮安装支架210上,传动链212通过啮合安装在主动轮207和从动轮211上。
33.如图4所示,一种集采摘-运输-收集于一体的大田西瓜智能收获机,采摘模块300由第一滑块301、连接杆302、第二滑块303、滚珠丝杠304、第二导轨305、第二安装支架306、第二电机307、第二摄像头308、电动夹爪309、仿形托举盘310、橡胶层311和刀片312构成;第一滑块301通过滑动副安装在第一外导轨203上,连接杆302一端固定设置在第一滑块301上方,另一端与传动链212相连,第二滑块303通过螺栓固定设置在第一滑块301上,第二导轨305通过滑动副安装在第二滑块303上,滚珠丝杠304通过轴承安装在第二导轨305上,滚珠丝杠304通过螺旋副与第二滑块303转动连接,第二安装支架306通过螺栓固定设置在第二导轨305上方,第二电机307通过螺栓安装在第二安装支架306上方,第二电机307的输出轴通过联轴器与滚珠丝杠304固定连接,第二摄像头308固定安装在第二导轨305下方,电动夹爪309通过螺栓安装在第二导轨305下端一侧,仿形托举盘310通过螺栓安装在电动夹爪309的末端夹指上,橡胶层311通过粘接安装在仿形托举盘310下方内侧,刀片312通过螺栓安装在仿形托举盘310下方外侧;
34.如图5所示,一种集采摘-运输-收集于一体的大田西瓜智能收获机,收集箱400放置在移动小车101上方后侧,位于控制器102和电池组103的后方。
35.如图1-5所示,一种集采摘-运输-收集于一体的大田西瓜智能收获机的工作原理如下:第一外导轨203、第一内导轨204设有凹槽,且凹槽与第一滑块301相配合,用于采摘模块300水平移动的导向;第一内导轨204前端通过支撑架201与辅助轮202相连,第一内导轨204后端通过型材与移动小车101固定连接;从动轮安装支架210和从动轮211的数量为7个,均安装在第一内导轨204上方;传动链212通过啮合安装在从动轮211和主动轮207上,传动链212位于连接块205的正下方,以便传动链212带动采摘模块300水平移动;仿形托举盘310、橡胶层311和刀片312的数量为2个,分别对称设置在电动夹爪309的两侧末端夹指上;仿形托举盘310为空心半球形结构,以便实现西瓜的仿形托举;刀片312为圆弧形结构刀片,以便实现西瓜瓜柄的仿形切割;采摘模块300的数量为若干个,通过第一滑块301设置在第一外导轨203和第一内导轨204上;第一外导轨203和第一内导轨204组成t字环形导轨,采摘模块300通过第一滑块301相对t字环形导轨作循环水平移动,以便实现西瓜采摘、运输、收集的一体化;第二电机307驱动滚珠丝杠304转动,滚珠丝杠304带动第二导轨305上下移动,第二导轨305带动电动夹爪309上下移动,以便实现采摘模块300下降采摘西瓜、采摘模块300上升运输西瓜和采摘模块300下降放置西瓜;移动模块100通过第一摄像头104获取的道路信息和西瓜位置信息运动至指定区域;采摘模块300通过第二摄像头308获取西瓜位置信息,第一电机208通过主动轮207和从动轮211带动传动链212进行移动,传动链212带动采摘模块300移动至西瓜上方,仿形托举盘310通过电动夹爪309张开,第二电机307驱动滚珠丝杠304转动,滚珠丝杠304带动第二导轨305向下移动,第二导轨305带动电动夹爪309移动至西瓜位置,仿形托举盘310通过电动夹爪309闭合,并保留一定间隙,完成对西瓜的包覆;电动夹爪309带动西瓜向上移动一段距离,西瓜瓜柄在藤蔓牵引力作用下位于仿形托举盘310
下方,仿形托举盘310通过电动夹爪309带动刀片312剪断西瓜瓜柄,完成西瓜的采摘;第二电机307驱动滚珠丝杠304转动,滚珠丝杠304带动第二导轨305向上移动,第二导轨305带动电动夹爪309移动至高于收集箱400的位置,第一电机208通过主动轮207和从动轮211带动传动链212移动,传动链212带动采摘模块300移动至收集箱400的上方,完成西瓜的运输;第二电机307驱动滚珠丝杠304转动,滚珠丝杠304带动第二导轨305向下移动,第二导轨305带动电动夹爪309移动至收集箱400内部,仿形托举盘310通过电动夹爪309张开,西瓜在重力作用下落入收集箱400内,完成西瓜的收集。
36.上述的移动小车101、控制器102、电池组103、第一摄像头104、第一电机208、滚珠丝杠304、第二电机307、第二摄像头308、电动夹爪309、螺栓,轴承,联轴器等都是本技术领域的公知常识或市场上常见的部件,在这里不再一一描述。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1