一种智能化草莓采摘机器人及其采摘方法与流程
1.本发明涉及草莓采摘领域,尤其涉及一种智能化草莓采摘机器人及其采摘方法。
背景技术:
2.现有的草莓采摘设备为人工辅助采摘设备,设备在草莓采摘过程中需要操作工辅助其运动,果实采摘完成后还需要有专门的工人对果品进行分类。显然,这种采摘设备只是在减轻劳动强度方面做出了贡献。同时,果品的二次分拣还会对草莓果实造成二次的损坏。
3.此外,现有的采摘机构,由于其夹持对象为草莓茎,因此其识别对象也为草莓茎。采摘机构采摘过程中首先需要精准定位成熟草莓的茎。然而,由于草莓果实的遮挡、未成熟草莓茎的干扰、草莓叶子叶柄的干扰等因素,传统的采摘方式的采摘效率较低。同时,由于草莓叶子、未成熟的青果和成熟果的遮挡以及草莓茎、草莓叶柄的干扰,导致传统采摘方式在采摘过程中容易出现误采,导致草莓的减产。
技术实现要素:
4.本发明的目的在于提供一种智能化草莓采摘机器人及其草莓采摘方法,将识别对象和夹持对象均定位为草莓果实,极大的提升了识别的效率,提升草莓采摘效率。
5.为实现上述发明目的,本发明采取的技术方案为:一种智能化草莓采摘机器人,包括主平台,所述主平台上设置有机械臂、控制系统和驱动单元,所述机械臂上安装有采摘执行机构,所述采摘执行机构上设置有双目相机,所述控制系统与所述双目相机和所述驱动单元信号连接,所述驱动单元与所述机械臂和所述采摘执行机构信号连接,所述控制系统通过所述驱动单元来控制所述机械臂和采摘执行机构的运动方式来实现对目标草莓的采摘。
6.上述方案中,所述主平台固定在运动小车上。
7.上述方案中,所述采摘执行机构包括直线电机和齿条块,所述直线电机与所述驱动单元信号连接,所述直线电机的输出轴上设置有螺纹,所述齿条块上设置有螺纹孔,所述直线电机与所述齿条块通过螺纹连接在一起,所述齿条块的两侧分别设置有固定轴和半齿轮,所述固定轴固定在所述半齿轮的轴心处,两个半齿轮分别与所述齿条块两侧的齿条啮合在一起,每个半齿轮的端面固定连接有采摘手抓,所述采摘手抓的末端固定有抓取块。
8.上述方案中,每个所述抓取块上设置有海绵垫片,所述海绵垫片内安装有压力传感器,所述压力传感器与所述控制系统的信号输入端连接。
9.上述方案中,所述齿条块、所述固定轴和所述半齿轮均位于安装箱体内,所述双目相机固定在所述安装箱体上。
10.上述方案中,还包括存储单元,所述存储单元由七个独立的存储箱组成,四个存储箱存储高品质草莓,两个存储箱存储低品质草莓,最后一个存储箱存储畸形草莓。
11.本发明还提供一种利用智能化草莓采摘机器人进行草莓采摘的方法,包括如下步骤:s1:双目彩色相机采集草莓果实图像信息,控制系统在收到双目相机的输入图像信息之
后,利用训练好的神经网络,可以迅速实现对采摘对象的识别,找出已经成熟的草莓,并自动计算采摘目标与双目相机之间的位置,通过相对位置求解,得到机械臂和采摘执行机构与采摘目标之间的相对位置关系;s2:控制系统通过驱动单元控制机械臂和采摘执行机构运动到指定位置;控制系统给采摘执行机构中的直线电机发送运动指令,直线电机运动一定的角度后,抓取块刚好完成采摘目标的采摘动作;s3:控制系统对采摘的草莓果形及大小进行判定,根据判定结果控制机械臂和采摘执行机构将其转运到具体的存储箱之中。
12.此外,本发明还单独提供一种采摘执行机构,所述采摘执行机构包括直线电机和齿条块,所述直线电机与所述驱动单元信号连接,所述直线电机的输出轴上设置有螺纹,所述齿条块上设置有螺纹孔,所述直线电机与所述齿条块通过螺纹连接在一起,所述齿条块的两侧分别设置有固定轴和半齿轮,所述固定轴固定在所述半齿轮的轴心处,两个半齿轮分别与所述齿条块两侧的齿条啮合在一起,每个半齿轮的端面固定连接有采摘手抓,所述采摘手抓的末端固定有抓取块。
13.上述方案中,每个所述抓取块上设置有海绵垫片,所述海绵垫片内安装有压力传感器,所述压力传感器与所述控制系统的信号输入端连接。
14.所述的采摘执行机构在草莓采摘机器人中的应用。
15.本发明的技术效果:(1)本发明依靠双目相机对草莓的果实信息进行采集,识别和夹持对象均为草莓果实,控制系统利用训练好的神经网络,可以迅速实现采摘对象的识别,并对采摘对象进行定位,通过预设的算法求解得到对机械臂和采摘执行机构的运动轨迹,实现草莓的采摘,可以极大的提升识别的效率、减小计算时间,进而提升整体采摘效率。(2)本发明设计的采摘执行机构,采摘手抓在齿轮-齿条结构的控制下可以实现草莓果实的夹紧-摘取-放置动作,齿轮-齿条结构的运动受直线电机的控制,可以精准快速的实现草莓果实的夹紧-摘取-放置动作。(3)压力传感器用于采集夹持过程中的压力,当压力值达到系统设置的压力阈值时,直线电机停止进给,采摘手抓到达夹紧状态。海绵垫片可以减缓夹持与采摘过程中草莓的损坏,还可以根据采摘草莓品种进行更换。 (4)本发明设计的草莓采摘机构,由于集成了彩色双目摄像头和控制系统,通过果品分类算法,可以将采摘的草莓进行精确分类。
附图说明
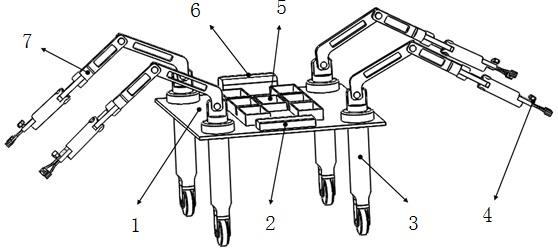
16.图1为智能化草莓采摘机器人总体结构示意图。
17.图2为智能化草莓采摘机器人采摘执行机构示意图。
18.图3为智能化草莓采摘机器人双目相机与安装箱体结构示意图。
19.图中:1.主平台;2.控制系统;3.运动小车;4.采摘执行机构;5.存储单元;6.驱动单元;7.机械臂;8.压力传感器;9.采摘手抓;9-1.抓取块;10.齿条块;10-1.固定轴;10-2.半齿轮;11.直线电机;12.海绵垫片;13.双目相机;14.安装箱体。
具体实施方式
20.下面结合附图,对本发明的技术方案进行更详细的说明。
21.如图1所示,一种智能化草莓采摘机器人,包括主平台1,所述主平台1固定在运动小车3上。所述主平台1上设置有四个机械臂7、控制系统2、存储单元5和驱动单元6,所述机
械臂7上安装有采摘执行机构4,所述采摘执行机构4上设置有双目相机13,所述控制系统2与所述双目相机13和所述驱动单元6信号连接,所述驱动单元6与所述机械臂7和所述采摘执行机构4信号连接。所述存储单元5由七个独立的存储箱组成,四个存储箱存储高品质草莓,两个存储箱存储低品质草莓,最后一个存储箱存储畸形草莓。
22.如图2所示,所述采摘执行机构4包括直线电机11和齿条块10,所述直线电机11与所述驱动单元6信号连接,所述直线电机11的输出轴上设置有螺纹,所述齿条块10上设置有螺纹孔,所述直线电机11与所述齿条块10通过螺纹连接在一起,所述齿条块10的两侧分别设置有固定轴10-1和半齿轮10-2,所述固定轴10-1固定在所述半齿轮10-2的轴心处,两个半齿轮10-2分别与所述齿条块10两侧的齿条啮合在一起,每个半齿轮10-2的端面固定连接有采摘手抓9,所述采摘手抓9的末端固定有抓取块9-1。每个所述抓取块9-1上设置有海绵垫片12,所述海绵垫片12内安装有压力传感器8,所述压力传感器8与所述控制系统2的信号输入端连接。采摘手抓9在齿轮-齿条结构的控制下可以实现草莓果实的夹紧-摘取-放置动作,齿轮-齿条结构的运动受直线电机11的控制,可以精准快速的实现草莓果实的夹紧-摘取-放置动作。压力传感器8用于采集夹持过程中的压力,当压力值达到系统设置的压力阈值时,直线电机11停止进给,采摘手抓9到达夹紧状态。海绵垫片13可以减缓夹持与采摘过程中草莓的损坏,还可以根据采摘草莓品种进行更换。
23.如图3所示,所述齿条块10、所述固定轴10-1和所述半齿轮10-2均位于安装箱体14内,所述双目相机13固定在所述安装箱体14上。
24.该智能化采摘机器人进行草莓采摘的方法如下:s1:双目相机采集草莓果实图像信息,控制系统在收到双目相机的输入图像信息之后,利用训练好的神经网络,可以迅速实现对采摘对象的识别,找出已经成熟的草莓,并自动计算采摘目标与双目相机之间的位置,通过相对位置求解,得到机械臂和采摘执行机构与采摘目标之间的相对位置关系;s2:控制系统通过驱动单元控制机械臂和采摘执行机构运动到指定位置;控制系统给采摘执行机构中的直线电机发送运动指令,直线电机运动一定的角度后,抓取块刚好完成采摘目标的采摘动作;s3:控制系统对采摘的草莓果形及大小进行判定,根据判定结果控制机械臂和采摘执行机构将其转运到具体的存储箱之中。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1