一种自走式青饲料收获机割台仿形探测机构及其控制方法
本发明涉及自走式青饲料收获机割台仿形探测机构及其控制方法,属于农业机械。
背景技术:
1、近年来,我国的玉米总产量呈上升趋势,青贮的占比也在逐步升高,青饲料收获机的各项技术需求也在上涨。
2、大多数国产青饲料收获机在进行田间收获作业时,田间地面大多有坡度变化,基于其机械式多手柄单独控制的操作方式,需要人工操作割台的升降,增加了人工操作的劳动强度,且在操作不标准时,会导致留茬高度或大或小,甚至会因操作不当损伤割台。
技术实现思路
1、本发明的目的在于针对现有的割台技术的不足,提供一种自走式青饲料收获机割台仿形探测机构及控制方法,仿形板位置靠前,仿形效果好,能适应较大坡度变化的田间地面,有效避免了割台碰到地面造成机械损坏,误差小,角度变化传递及时,增大仿形板活动范围,防止倒车时误触损坏方形探测机构。
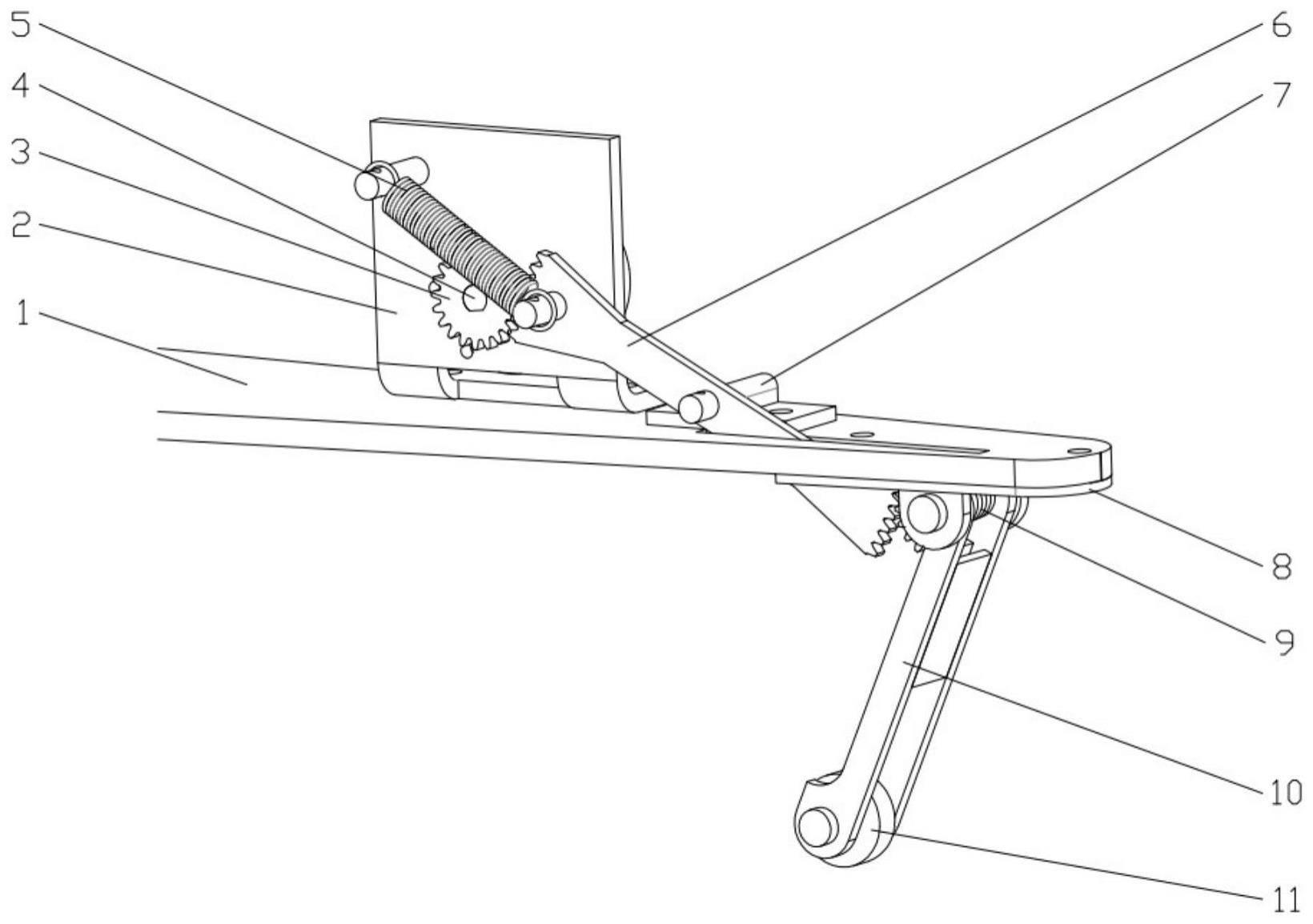
2、为了达到上述目的,本发明提供了如下技术方案:第一方面,本发明提供一种自走式青饲料收获机割台仿形探测机构,包括分禾器下底板1、传感器固定板2、角度传感器齿轮3、角度传感器4、异形齿轮拉簧5、异形齿轮6、异形齿轮固定板7、连接板8、扭簧9、仿形板10、仿形轮11、arduino uno控制板13、继电器14;
3、所述仿形板10与连接板8通过转轴铰接,能绕铰接轴转动,扭簧9处于铰接轴处提供支持力,连接板8通过定位孔焊接在分禾器下底板1底面前端,角度传感器齿轮3与角度传感器4转轴连接并用螺栓连接的方式安装在分禾器下底板1上面,角度传感器齿轮3与异形齿轮6一端以齿轮啮合的方式相接,仿形板10上端带有轮齿与异形齿轮6另一端轮齿相啮合,仿形板10下端安装一仿形轮11,仿形轮11与地面接触,随地面起伏变化带动仿形板10上下摆动,并将仿形板10的角度变化传递至角度传感器4处,异形齿轮6与异形齿轮固定板7的转轴连接并以螺栓连接的方式安装在分禾器下底板1上面,拉簧5套在传感器固定板2和异形齿轮6的焊接立棍上,提供拉力,角度传感器4输出端子直接与arduino uno控制板13输入接口连接,并由arduino uno控制板13供电,arduino uno控制板13将输入的模拟电压信号处理后,输出数字信号,直接控制继电器14的开闭,进而控制电磁阀的换位,实现割台的仿形。
4、作为本发明的进一步方案,所述分禾器下底板1包括通孔ⅰ101、通孔ⅱ102、弯折103、通孔ⅲ104、通孔ⅳ105、通孔ⅴ106、通孔ⅵ107、定位通孔ⅰ108、矩形槽109、定位通孔ⅱ110、圆头111;分禾器下底板1前端为圆头111,圆头111前端的半圆处半径为14mm,两侧斜边夹角为10°,当前端触碰到青贮时能使其滑向两侧,实现良好的分禾效果;通孔ⅰ101、通孔ⅱ102用螺栓和割台连接;正常工作情况下割台不与地面平行,设置弯折103使分禾器下底板1与地面接近平行;通孔ⅲ104、通孔ⅳ105用于传感器固定板2和分禾器下底板1的螺栓连接,通孔ⅴ106、通孔ⅵ107用于异形齿轮固定板7和分禾器下底板1的螺栓连接,定位通孔ⅰ108和定位通孔ⅱ110用于连接板8和分禾器下底板1的焊接定位,矩形槽109用作异形齿轮6的转动空间。
5、作为本发明的进一步方案,所述传感器固定板2包括通孔ⅶ201、通孔ⅷ202、通孔ⅸ203、通孔ⅹ204、通孔ⅺ205、通孔ⅻ206;所述通孔ⅷ202焊接一立棍,孔中心距离底面50mm,距离左侧11.3mm,其位置能使拉簧5将异形齿轮6脱离啮合后拉至特定位置,使得当仿形板10与异形齿轮6再次啮合时,能保证之前的啮合位置;通孔ⅶ201、通孔ⅸ203、通孔ⅺ205用于螺钉安装角度传感器4;角度传感器4转轴能在通孔ⅹ204中转动;传感器固定板2通过通孔ⅻ206用螺栓安装在分禾器下底板1上面;传感器固定板2上方设置成斜面减少占用空间。
6、作为本发明的进一步方案,所述角度传感器齿轮3与联轴器设计为一体式,与角度传感器4的转轴连接。
7、作为本发明的进一步方案,所述异形齿轮6包括轮齿ⅰ601、立棍602、第一通孔603;异形齿轮6由模数为1,齿数为100,厚度为3的齿轮切割制成,异形齿轮6与角度传感器齿轮3啮合的一端留有7个齿,其中最下端的一个齿是轮齿ⅰ601,并焊接一立棍602,与仿形板10啮合的一端留有6个齿;异形齿轮6在活动范围内,不会与角度传感器齿轮3脱离啮合;异形齿轮6上的13个齿,除轮齿ⅰ601外,其余12个齿关于第一通孔603中心对称分布;轮齿齿形为渐开线轮齿;第一通孔603与异形齿轮固定板7的转轴701连接;异形齿轮6受拉簧5拉力,仿形板10受扭簧9扭力,两个力让异形齿轮6和仿形板10的转动趋势相反,使二者正常运作时只有单侧齿面接触,保证角度传递的精确性。
8、作为本发明的进一步方案,所述异形齿轮固定板7由钢板和转轴焊接而成,转轴701用作异形齿轮6的旋转轴;通过第二通孔702和第三通孔703用螺栓安装在分禾器下底板1上面;转轴701长度28mm,其长度能保证异形齿轮6不会脱落。
9、作为本发明的进一步方案,所述连接板8包括外轮廓801、定位通孔ⅲ802、铰接处ⅰ803、空槽804、槽805、定位通孔ⅳ806;连接板8的外轮廓801形状与分禾器下底板1前端外形一致,便于焊接;定位通孔ⅲ802和定位通孔ⅳ806用于和分禾器下底板1进行焊接定位;铰接处ⅰ803铰接仿形板10;空槽804用于仿形板10的转动空间,使仿形板10有更大的摆动范围,摆动范围为0~160°;槽805宽为4mm,用作异形齿轮6的转动空间。
10、作为本发明的进一步方案,所述仿形板10包括长凹槽1001、轮齿ⅱ1002、铰接处ⅱ1003、焊接板1004、仿形板左板1005、仿形板右板1006、铰接处ⅲ1007;仿形板10上端铰接处一侧均布能与异形齿轮6相啮合的6个轮齿ⅱ1002,仿形板10由仿形板左板1005、仿形板右板1006、两块焊接板1004焊接而成,仿形板左板1005的两个孔与仿形板右板1006的两个孔分别同心,保证转轴能够穿过,两块焊接板1004焊接于仿形板左板1005、仿形板右板1006中间,且两块焊接板1004间留有缝隙来固定扭簧9;
11、长凹槽1001设置在仿形板左板1005、仿形板右板1006上用于减少仿形板所占空间,使其能有更大的活动范围;仿形板过长,在接近地面时与水平夹角过小,在面对坡度变化大的田间地面表现差,仿形板过短,则导致其不接地时,水平夹角过大,当突然接地时易损坏机械结构,留茬高度的允许范围是100mm~150mm,铰接处ⅱ1003和铰接处ⅲ1007分别设置在仿形板左板1005、仿形板右板1006的上下两端,分别用于连接连接板8、仿形轮11,铰接处ⅱ1003在垂直地面方向上的距离和留茬高度h的函数关系为h=h+r+l*sin(α),其中h为留茬高度,h为割刀与铰接处ⅱ1003在垂直于地面方向上的距离,r为仿形轮半径,l为仿形板两铰接点间距离,α为仿形板与水平方向的夹角,计算得出铰接处ⅱ1003与铰接处ⅲ1007在垂直地面方向上的距离范围是16.8mm~66.8mm,为了保护探测机构,将仿形轮11不接地时的水平夹角设为65°,仿形板最短为l=66.8/sin65°=73.7mm,为了使仿形板10能够在大部分地面上工作,将仿形板10接地时与水平夹角最小值设为12.5°,此时仿形轮接地点与铰接处ⅱ1003的连线与水平方向夹角为20°,仿形板最长为l=16.8/sin12.5°=77.6mm,取仿形板同侧两孔间距离为77mm。
12、作为本发明的进一步方案,还包括分禾器下底板1尖端分禾器外罩12,分禾器外罩12固接于分禾器下底板1上方。
13、第二方面,提供一种自走式青饲料收获机割台仿形探测机构的控制方法,用于控制如第一方面所述的自走式青饲料收获机割台仿形探测机构,包括如下:
14、取仿形探测机构在前一段时间内留茬高度的平均值作为仿形动作判断的依据,割台的升降仿形动作与左右倾斜的仿形动作共存,不冲突,当有一侧测得留茬高度平均值超出阈值范围时,触发仿形动作:
15、(1)割台左侧留茬高度小于阈值范围或右侧留茬高度大于阈值范围时,且左右两侧留茬高度差值大于设定值a,触发割台向右倾斜的仿形动作,当左右两侧留茬高度差值小于设定值b时结束仿形动作;
16、(2)割台右侧留茬高度小于阈值范围或左侧留茬高度大于阈值范围时,且左右两侧留茬高度差值大于设定值a,触发割台向左倾斜的仿形动作,当左右两侧留茬高度差值小于设定值b时结束仿形动作;
17、(3)割台一侧留茬高度小于阈值范围且两侧留茬高度差值小于设定值a,触发割台上升的仿形动作,当两侧留茬高度差值均超过常态值时结束动作;
18、(4)割台一侧留茬高度大于阈值范围且两侧留茬高度差值小于设定值a,触发割台下降的仿形动作,当其中一侧留茬高度差值低于常态值时结束动作。
19、本发明的有益效果是:
20、本发明提供的一种自走式青饲料收获机割台仿形探测机构及其控制方法,在现有的青饲料收获机割台的基础上,以齿轮传动的原理进行设计,结构简单,使用简便,配备相应控制系统,提高了青饲料收获机的机械化程度,降低了人工操作的复杂程度。
21、该仿形探测机构的仿形轮与地面接触,将田间地面高度变化转换为角度变化,进而转换为控制割台升降动作的控制信号,同时也可监测当前的留茬高度。仿形探测机构位置靠前,仿形探测效果好,能适应较大坡度变化的田间地面,有效避免了割台碰到地面造成机械损坏的情况。仿形板与角度传感器间的动力传递采用齿轮传动的方式,误差小,角度变化传递及时。
22、仿形板可进行大角度范围活动,当倒车时,仿形板可能会撞到障碍物,大角度的活动范围使仿形板能够滑过障碍,避免因为仿形板的角度限位而使机械受损。并设置一拉簧,保证仿形板与异形齿轮脱离啮合后,异形齿轮保持在特定的位置,当仿形板受扭簧扭力恢复原位时,保证和之前同样的轮齿啮合相对位置。
23、总体上,保证了青饲料的收割效率,收割效果,减少浪费,大大降低了操作的复杂程度和作业时间,使青饲料收获机能在起伏不平的田间地面作业,具有良好的经济效益和社会效益,具有广阔的市场前景。
- 还没有人留言评论。精彩留言会获得点赞!