一种多工况绿豆播种机及播种方法与流程
1.本发明涉及农业领域,更具体的说是一种多工况绿豆播种机及播种方法。
背景技术:
2.近年来国家加大各领域科研的投入,随之也加快了农业设备的研发,在大面积和自动化集中化的种植业的时代背景下渐渐的利用科技产物替代一些传统的人工播种方法。例如:cn215269429u,一种绿豆播种装置,本实用新型涉及一种绿豆播种装置,包括料斗、集流罩、弧形壳和转斗,所述料斗两相对侧均设置有安装杆,相邻所述安装杆分别与连接杆两端连接,所述料斗底部导通安装有集流罩,所述集流罩底部安装有弧形壳,所述弧形壳内部转动安装有转斗,所述转斗内部开设有若干个储种槽,所述储种槽内部滑动安装有活动板,且活动板的面积与储种槽的剖面相同;通过转动转把带动主动斜齿旋转,进而带动啮合的从动斜齿旋转,旋转的从动斜齿带动螺纹杆旋转,进而带动螺纹连接的螺纹套管在螺纹杆外侧移动,通过导杆起到导向作用,实现活动板在储种槽内的移动,便于对储种槽内存放绿豆种子的空间进行调整,便于在实际播种时调整每个坑位的绿豆播种数量。该发明未有装置挂载设计,播种时无土壤覆盖设计,需增加二道掩埋工序。例如:cn111615893a,一种绿豆播种装置,本发明属于农业播种技术领域,尤其为一种绿豆播种装置,包括支撑座,所述支撑座内部贯穿连接有播种箱,所述播种箱下方末端设置有固定板,所述支撑座内部贯穿连接有一体成型固定杆,所述支撑座外表面一侧焊接有一体成型三号支撑杆,且三号支撑杆一侧末端通过支座转动连接有二号转轴,所述固定杆外表面一侧末端与二号转轴外表面相焊接,所述三号支撑杆外表面一侧连接有铰链本装置在二号转轴下方焊接有固定杆,在播种过程中,播种人员,可以用手向上移动固定杆,使二号转轴也随着转动,从而可以通过二号支撑杆,带动固定板滑动,使播种箱下方槽口出现空隙,从而播种箱内部绿豆种子掉落至土壤中,完成播种。该发明无种子数量等份设计,在播种过程中不易掌握种子数量,最终当一个生长周期完成时种植区域密疏度不同。
技术实现要素:
3.本发明的目的是提供一种多工况绿豆播种机及绿豆收割方法,整个设备的移动系统由快拆轮组和滑轮组组成,分别适用于传统土壤种植以及自动化农场,通过桥接器可使得多个设备组合运行,搭配快拆式轮组增加产品的实用性,均适配小规模以及大规模种植,播种装置所插入土壤的深度可通过延长部分轴体的长度实现,播种时双通道播种结构增加农作物成活率,通过等分出料装置标准化制定每次播种的种子数量,待农作物生长周期结束可依播种数量记录产量,具备一定科研方法,播种装置插入土壤后覆土机构撑开,待播种结束向上回伸时覆土机构内测闭合掩盖土壤,完成播种掩埋工作,提高种子成活率。
4.本发明的目的通过以下技术方案来实现:
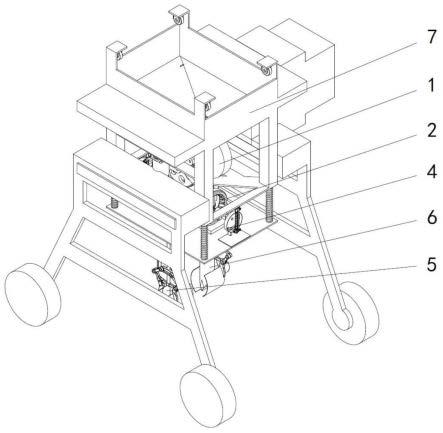
5.一种多工况绿豆播种机,其特征在于:包括等分出料装置、联轴同速装置、第一柱簧动力装置、第二柱簧动力装置、第一播种装置、第二播种装置、机架,等分出料装置、联轴
同速装置、第一柱簧动力装置、第二柱簧动力装置、第一播种装置、第二播种装置均与机架相连接,等分出料装置与第一播种装置、第二播种装置相连接,第一柱簧动力装置、第二柱簧动力装置均与联轴同速装置相连接。
6.作为本技术方案的进一步优化,本发明一种多工况绿豆播种机,所述等分出料装置包括电机a、齿轮支架a、等分腔体,其中电机a通过其输出轴与伞齿轮a固定连接,伞齿轮a与伞齿轮b啮合连接,伞齿轮b、齿轮轴a、啮合式转盘a均与轴a固定连接,齿轮轴a与啮合式转盘a啮合连接,啮合式转盘a通过双齿齿轮a与双齿齿轮b啮合连接,双齿齿轮b通过双齿齿轮c与齿轮轴b啮合连接,齿轮轴a、啮合式转盘a、双齿齿轮a、双齿齿轮b、双齿齿轮c、齿轮轴b均与齿轮支架a转动连接,齿轮轴b与啮合式转盘b固定连接,啮合式转盘a与啮合式转盘b啮合连接,啮合式转盘a、啮合式转盘b均与等分腔体转动连接。
7.作为本技术方案的进一步优化,本发明一种多工况绿豆播种机,所述联轴同速装置包括电机b、齿环支架,其中电机b与齿环支架固定连接,电机b与伞齿轮c固定连接,伞齿轮c与伞齿轮d啮合连接,z型轴a、z型轴b均与u型连杆固定连接,u型连杆、z型轴a、z型轴b均与齿环支架转动连接,z型轴a与斜齿轮a转动连接,斜齿轮a、斜齿轮b均与齿环支架啮合连接,斜齿轮b与z型轴b转动连接。
8.作为本技术方案的进一步优化,本发明一种多工况绿豆播种机,所述第一柱簧动力装置包括支撑架a、十字固定块,其中支撑架a与轴b转动连接,轴b与偏心轨道转盘固定连接,偏心轨道转盘与橡胶轮连接,橡胶轮通过轴d与十字固定块固定连接,轴c、弹簧垫片、调节螺杆a均与十字固定块固定连接,轴c与支撑架a连接,调节螺杆b通过轴e与支撑架a固定连接,调节螺杆c通过限位块与轴e固定连接,弹簧垫片、支撑架a均与弹簧a连接,轴c与三角支撑板固定连接。
9.作为本技术方案的进一步优化,本发明一种多工况绿豆播种机,所述第二柱簧动力装置所含部件均与第一柱簧动力装置相同,其装配方式、顺序均与第一柱簧动力装置相同,其运行顺序、实现功能均与第一柱簧动力装置相同。
10.作为本技术方案的进一步优化,本发明一种多工况绿豆播种机,所述第一播种装置包括活动出料筒、行程限位架,其中固定出料筒与活动出料筒连接,t型连杆轴、行程限位架均与活动出料筒固定连接,t型连杆轴与行程限位架连接,连杆a、连杆b均与t型连杆轴转动连接,连杆a通过双面弧形铲a与行程限位架转动连接,连杆b通过双面弧形铲b与行程限位架转动连接。
11.作为本技术方案的进一步优化,本发明一种多工况绿豆播种机,所述第二播种装置所含部件均与第一播种装置相同,其装配方式、顺序均与第一播种装置相同,其运行顺序、实现功能均与第一播种装置相同。
12.作为本技术方案的进一步优化,本发明一种多工况绿豆播种机,所述机架包括种子储存总成、活动伸缩板,其中活动伸缩板通过弹簧b与种子储存总成连接,快拆式轮组架a、拆式轮组架b均与种子储存总成固定连接,滑轮与种子储存总成转动连接,多设备桥接块与种子储存总成固定连接。
13.一种种子播种方法,具体通过上文权利要求中的一种多工况绿豆播种机来实现,包括以下步骤:
14.s1、启动联轴同速装置2,带动第一柱簧动力装置3、第二柱簧动力装置4,将第一播
种装置5、第二播种装置6插入至地面中,过程包括如下:
15.s1.1、启动电机b201,带动伞齿轮c202转动,带动u型连杆204转动,带动z型轴a205、z型轴b209转动,实现两侧第一播种装置5、第二播种装置6的启动;
16.s1.2、z型轴b209转动带动轴b302转动,带动偏心轨道转盘303转动,带动橡胶轮304沿转动的偏心轨道转盘303内部轨道上下移动,带动与三角支撑板315固定连接的活动伸缩板702上下运动;
17.s1.3、活动伸缩板702运动时带动活动出料筒502伸缩运动,带动t型连杆轴503伸缩运动,带动活动出料筒502插入一定深度的土壤;
18.s2、启动等分出料装置1,将绿豆等分输送至第一播种装置5、第二播种装置6中,插入至土壤播种后并掩埋,过程包括如下:
19.s2.1、启动电机a101,带动伞齿轮a102转动,带动啮合式转盘a106转动,带动啮合式转盘b112转动,通过等分腔体113中的分隔板将种子分别输送至第一播种装置5、第二播种装置6中;
20.s2.2、种子顺着固定出料筒501最终掉落至活动出料筒502插入土壤后的倒三角坑中,再次启动联轴同速装置2使得第一柱簧动力装置3、第二柱簧动力装置4回缩,回缩时活动出料筒502带动t型连杆轴503伸缩运动,带动连杆a505、连杆b506运动,带动双面弧形铲a507、双面弧形铲b508丛张开状运动至收缩状,将破土时溢出的两侧土壤掩盖。
21.本发明一种多工况绿豆播种机的有益效果为:
22.本发明的一种多工况绿豆播种机及绿豆收割方法,其有益效果为:1、整个装置的移动系统由快拆轮组和滑轮组组成,分别适用于传统土壤种植以及自动化农场;2、通过桥接器可使得多个设备组合运行,搭配快拆式轮组增加产品的实用性,均适配小规模以及大规模种植;3、播种装置所插入土壤的深度可通过延长部分轴体的长度实现,播种时双通道播种结构增加农作物成活率;4、通过等分出料装置标准化制定每次播种的种子数量,待农作物生长周期结束可依播种数量记录产量,具备一定科研方法,播种装置插入土壤后覆土机构撑开,待播种结束向上回伸时覆土机构内测闭合掩盖土壤,提高种子成活率。
附图说明
23.下面结合附图和具体实施方法对本发明做进一步详细的说明。
24.图1是本发明的整体结构示意图一;
25.图2是本发明的整体结构示意图二;
26.图3是本发明的整体结构示意图三;
27.图4是本发明的等分出料装置结构示意图一;
28.图5是本发明的等分出料装置结构示意图二;
29.图6是本发明的联轴同速装置结构示意图一;
30.图7是本发明的第一柱簧动力装置结构示意图一;
31.图8是本发明的第一播种装置结构示意图一;
32.图9是本发明的机架结构示意图一;
33.图中:等分出料装置1;电机a101;伞齿轮a102;伞齿轮b103;轴a104;齿轮轴a105;啮合式转盘a106;双齿齿轮a107;双齿齿轮b108;双齿齿轮c109;齿轮轴b110;齿轮支架
a111;啮合式转盘b112;等分腔体113;联轴同速装置2;电机b201;伞齿轮c202;伞齿轮d203;u型连杆204;z型轴a205;斜齿轮a206;齿环支架207;斜齿轮b208;z型轴b209;第一柱簧动力装置3;支撑架a301;轴b302;偏心轨道转盘303;橡胶轮304;轴c305;弹簧垫片306;弹簧a307;十字固定块308;调节螺杆a309;轴d310;轴e311;调节螺杆b312;限位块313;调节螺杆c314;三角支撑板315;第二柱簧动力装置4;第一播种装置5;固定出料筒501;活动出料筒502;t型连杆轴503;行程限位架504;连杆a505;连杆b506;双面弧形铲a507;双面弧形铲b508;第二播种装置6;机架7;种子储存总成701;活动伸缩板702;弹簧b703;滑轮704;快拆式轮组架a705;拆式轮组架b706;多设备桥接块707。
34.具体实施
35.下面结合附图对本发明作进一步详细说明。
36.具体实施例一:
37.下面结合图1-9说明本实施方式,一种多工况绿豆播种机,包括等分出料装置1、联轴同速装置2、第一柱簧动力装置3、第二柱簧动力装置4、第一播种装置5、第二播种装置6、机架7,等分出料装置1、联轴同速装置2、第一柱簧动力装置3、第二柱簧动力装置4、第一播种装置5、第二播种装置6均与机架7相连接,等分出料装置1与第一播种装置5、第二播种装置6相连接,第一柱簧动力装置3、第二柱簧动力装置4均与联轴同速装置2相连接。
38.具体实施例二:
39.下面结合图1-9说明本实施方式,本实施方式对实施例一作进一步说明,所述等分出料装置1运行过程为电机a101启动,其输出轴带动伞齿轮a102转动,伞齿轮a102带动伞齿轮b103转动,伞齿轮b103通过轴a104带动齿轮轴a105、啮合式转盘a106转动,为了使啮合式转盘a106与啮合式转盘b112能够啮合转动,通过大小齿轮的不断啮合最终使啮合式转盘b112转速呈啮合式转盘a106的一定倍数增加,直至使啮合式转盘a106完全与啮合式转盘b112啮合连接,此处的差速机构可通过调节齿轮的大小及齿速比从而控制差速机构两端输入和输出转速呈一定正比,若后期调节等分时种子的数量则可通过快速更换大小齿轮盘以及差速机构的双齿齿轮实现,细节为齿轮轴a105转动时带动双齿齿轮a107转动,双齿齿轮a107带动双齿齿轮b108转动,双齿齿轮b108带动双齿齿轮c109转动,双齿齿轮c109带动齿轮轴b110转动,齿轮轴b110带动啮合式转盘b112转动,当绿豆种子丛等分腔体113上方的进料口填满啮合式转盘a106与与啮合式转盘b112啮合时的等分空隙处,通过啮合式转盘a106与与啮合式转盘b112的转动依次等分填满啮合式转盘b112两齿之间的空隙,最终在等分腔体113的下口落料处由内部的分隔板分别落入至第一播种装置5、第二播种装置6中。
40.具体实施例三:
41.下面结合图1-9说明本实施方式,本实施方式对实施例一作进一步说明,所述联轴同速装置2运行过程为电机b201启动,其输出轴带动伞齿轮c202转动,伞齿轮c202带动伞齿轮d203转动,伞齿轮d203带动u型连杆204转动,u型连杆204通过z型轴a205带动斜齿轮a206沿齿环支架207转动,u型连杆204通过z型轴b209带动斜齿轮b208沿着齿环支架207内转动,通过同时控制z型轴a205和z型轴b209转动,实现同时稳定输出分别控制第二柱簧动力装置4、第一柱簧动力装置3。
42.具体实施例四:
43.下面结合图1-9说明本实施方式,本实施方式对实施例一作进一步说明,所述第一
柱簧动力装置3运行过程为z型轴b209转动时带动轴b302转动,轴b302带动偏心轨道转盘303转动,偏心轨道转盘303通过橡胶轮304最终带动轴c305沿支撑架a301伸缩运动,为了控制轴c305伸出时的长短,通过十字固定块308控制轴c305的上下限位,一切的取值范围均是在偏心轨道转盘303之中,在播种过程中若是需要延长或缩短活动出料筒502的插入土壤深度,则通过调节十字固定块308沿轴c305上下移动,并通过调节螺杆a309固定轴c305,则可以实现轴c305的行程控制,再通过调节限位块313沿轴e311随着十字固定块308一起移动,作为十字固定块308在长期工作后产生位移时的限位措施,在轴c305向上移动时通过弹簧a307作为此装置的阻尼,加以提高装置运行的稳定性,由于三角支撑板315与种子储存总成701固定连接,最终由轴c305带动三角支撑板315推动种子储存总成701下侧的底板,反向推动活动伸缩板702向下运动,活动伸缩板702带动第一播种装置5、第二播种装置6向下运动直至插入土壤。
44.具体实施例五:
45.下面结合图1-9说明本实施方式,本实施方式对实施例一作进一步说明,所述第二柱簧动力装置4所含部件均与第一柱簧动力装置3相同,其装配方式、顺序均与第一柱簧动力装置3相同,其运行顺序、实现功能均与第一柱簧动力装置3相同。
46.具体实施例六:
47.下面结合图1-9说明本实施方式,本实施方式对实施例一作进一步说明,所述第一播种装置5运行过程为活动伸缩板702向下运动时带动活动出料筒502沿固定出料筒501向下运动,此处固定出料筒501与等分腔体113的下口落料处固定连接,当活动出料筒502向下运动时带动t型连杆轴503向下运动,在行程限位架504处通过连杆a505、连杆b506挤压带动双面弧形铲a507、双面弧形铲b508张开转动,顺利将活动出料筒502底部尖锐出料口插入至一定深度的土壤中,此时等分出料装置1运作,将等分的种子经过固定出料筒501丛活动出料筒502的出料口中落入土壤,此时第一柱簧动力装置3、第二柱簧动力装置4继续运作,将活动伸缩板702向上回缩,回缩过程中带动活动出料筒502向上复位,复位过程中t型连杆轴503也随之向上运动,t型连杆轴503向上回缩时通过连杆a505、连杆b506带动双面弧形铲a507、双面弧形铲b508沿着行程限位架504像内测闭合,将破开土壤时两侧挤压形成的土壤刮取覆盖至种子上方,实现种子的播种掩埋效果,增加种子的成活率。
48.具体实施例七:
49.下面结合图1-9说明本实施方式,本实施方式对实施例一作进一步说明,所述第二播种装置6所含部件均与第一播种装置5相同,其装配方式、顺序均与第一播种装置5相同,其运行顺序、实现功能均与第一播种装置5相同。
50.具体实施例八:
51.下面结合图1-9说明本实施方式,本实施方式对实施例一作进一步说明,所述机架7主要为由种子储存总成701与各部相连,种子储存于种子储存总成701内部,下部设有出料口,与等分出料装置1连接,活动伸缩板702通过弹簧b703与种子储存总成701连接,通过第一柱簧动力装置3、第二柱簧动力装置4稳定带动活动伸缩板702运动,通过滑轮704带动整个设备沿自动化温室铺设的轨道内线性作业,在野外农场作业时可通过快拆式轮组架a705、拆式轮组架b706快速装配,实施作业,在大型种植农场作业或区域范围作业时,可通过多设备桥接块707连接两台及以上的设备联合作业,可根据两线性种植区域之间的田径
宽度调节多设备桥接块707的宽度。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1