一种残膜回收机及其膜土团聚体回收质量调控装置及方法与流程
本发明涉及残膜回收及农业测控技术,特别是一种残膜回收机及其膜土团聚体回收质量调控装置及方法。
背景技术:
1、地膜覆盖技术作为增产增收、确保粮食安全、蓄水保墒、降低土壤盐碱度、有效预防病虫害的有效手段,普遍应用于粮、棉、油、菜、瓜果、烟、糖、药、麻、茶、林等40多种农作物上,使作物普遍增产增值。但地膜覆盖技术给农业带来增产增效的同时,也带来了“白色污染”,残留的地膜在自然条件下极难降解,大量地膜滞留在田间对土壤理化性质和作物产量产生极大的影响,不利于农业可持续发展,土壤中地膜残留量已经是农业发展不可忽略的问题。
2、现有技术解决田间地膜污染的方法有人工回收和机械捡拾残膜两种,人工回收是通过人力将田间的地膜进行回收,此方法效率低,不能用于规模化种植的农田;机械回收是以机械为动力回收地膜,使用残膜回收机回收残膜是当前残膜治理的最好办法。随着收膜工具的不断改进,机械化收膜方式有很大改变,在不同时期先后出现了多种功能不同的残膜回收机。根据农艺作业时间的不同,征残膜回收机可分为苗期地膜回收机、秋后残膜回收机和播前残膜回收机,其中秋后回收作业机应用最广泛;按机具不同作业形式,可分为单项作业机和联合作业机,其中联合作业机包括秸秆粉碎还田残膜回收联合作业和整地残膜回收联合作业;按工作部件入土深度不同,可以分为表层残膜回收机和耕层残膜回收机;按关键收膜部件的不同,可分为滚筒式、弹齿式、齿链式、滚筒缠绕式等,其中滚筒式收膜部件主要依靠偏心机构、凸轮或滑道实现捡膜弹齿的伸缩,完成残膜的捡拾与脱送,整机结构复杂,成本高;弹齿式收膜部件结构简单、造价低,但残膜回收率低。
3、残膜回收机的作业环境恶劣,故障发生率高,其作业可靠性是残膜回收机的重要指标。现有的残膜回收机智能化水平低,工作过程中回收率不高,稳定运行时间短,会因外部环境的不同而发生变化,无法实时检测其实际工作参数,实时收集机具作业状态的相关数据;残膜回收机的回收效果取决于起膜装置的起膜效果,若不能及时调整作业深度,将会导致整机工作效率下降,故障发生概率上升,工作部件损耗加剧,严重时甚至会对机器造成损坏。因此,残膜回收机质量调控对全程推进地膜高效回收,提升废旧农膜资源利用具有重要意义,也是本领域亟待解决的技术问题。
技术实现思路
1、本发明所要解决的技术问题是针对现有技术的上述缺陷,提供一种残膜回收机及其膜土团聚体回收质量调控装置及方法。
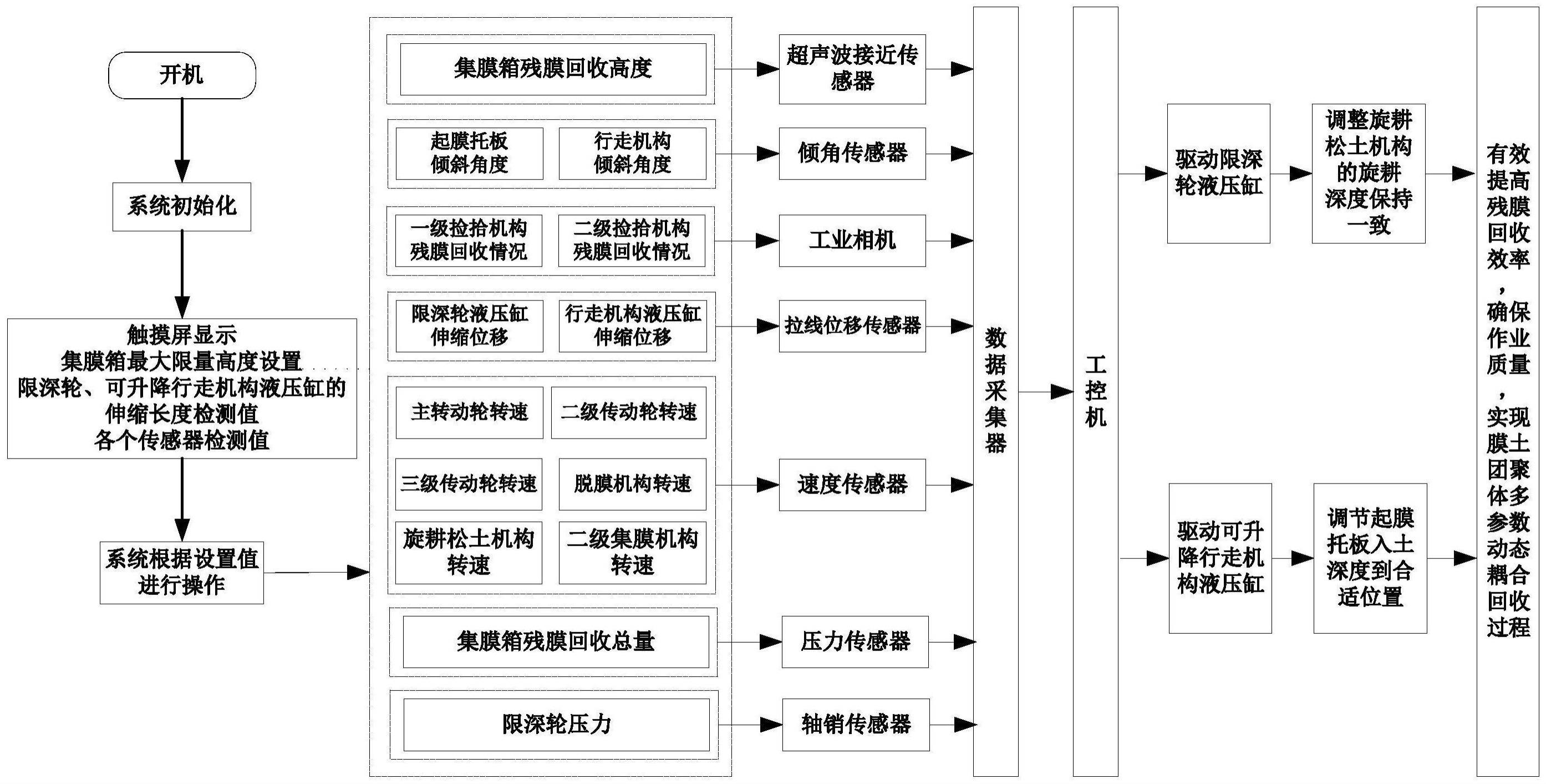
2、为了实现上述目的,本发明提供了一种膜土团聚体回收质量调控装置,其中,安装在残膜回收机上,包括:
3、速度传感器,安装在所述残膜回收机的主转动轮、二级传动轮、三级传动轮和脱膜机构、旋耕松土机构及二级集膜机构的转轴上,用于检测转速;
4、倾角传感器,安装在所述残膜回收机的起膜托板和可升降行走机构上,用于检测所述起膜托板和可升降行走机构的倾斜角度;
5、轴销传感器,安装在所述残膜回收机的限深轮的转轴上,用于检测所述限深轮的压力;
6、拉线位移传感器,安装在所述限深轮和可升降行走机构的液压缸上,用于检测液压缸的伸缩位移,所述限深轮和可升降行走机构分别通过各自的液压缸控制升降;
7、工业相机,安装在所述残膜回收机的一级捡拾机构和二级捡拾机构上方,用于生成图像信息以检测残膜回收情况;
8、数据采集器,分别与所述速度传感器、倾角传感器、轴销传感器和拉线位移传感器连接,用于采集相应的传感器信号并生成数据信息;以及
9、工控机,分别与所述工业相机、数据采集器及限深轮和可升降行走机构的液压缸连接,用于接收所述图像信息和数据信息并进行处理后,分别向所述限深轮和可升降行走机构的液压缸发送控制指令,实现膜土团聚体回收过程的多参数动态耦合质量调控。
10、上述的膜土团聚体回收质量调控装置,其中,还包括:超声波接近传感器,安装在所述残膜回收机的集膜箱的顶部并与所述数据采集器连接,用于检测残膜回收量是否超过设定高度。
11、上述的膜土团聚体回收质量调控装置,其中,还包括:压力传感器,安装在所述集膜箱的底部并与所述数据采集器连接,用于检测所述集膜箱内回收残膜的总量。
12、为了更好地实现上述目的,本发明还提供了一种膜土团聚体回收质量调控方法,其中,用于实现残膜回收机在膜土团聚体回收过程中的多参数动态耦合质量调控,包括如下步骤:
13、s100、根据设定的旋耕深度和作业深度,调整所述残膜回收机的限深轮、起膜托板和可升降行走机构到设定位置;
14、s200、采用速度传感器检测的所述残膜回收机的主转动轮、二级传动轮、三级传动轮、脱膜机构、旋耕松土机构和二级集膜机构的转速,待传动平稳后所述残膜回收机开始工作;以及
15、s300、采用轴销传感器、倾角传感器和拉线位移传感器分别检测所述限深轮的压力、旋耕松土机构与起膜托板的倾斜角度及限深轮与可升降行走机构的液压缸的伸缩位移,并发送至数据采集器生成数据信息;
16、s400、采用工业相机检测残膜回收情况并生成图像信息;以及
17、s500、工控机接收所述数据信息和图像信息,并根据预先建立的膜土团聚体回收多参数动态耦合质量调控模型对所述数据信息和图像信息进行数据处理后,分别向所述限深轮与可升降行走机构的液压缸发送控制指令,调整所述旋耕松土机构的旋耕深度保持一致,和/或调节所述起膜托板的入土深度为设定深度。
18、上述的膜土团聚体回收质量调控方法,其中,还包括:
19、s600、采用压力传感器检测所述残膜回收机的集膜箱的重力,准确获取回收残膜的质量。
20、上述的膜土团聚体回收质量调控方法,其中,还包括:
21、s700、采用超声波接近传感器检测所述残膜回收机的集膜箱内残膜总量是否超过设定高度;若所述集膜箱内残膜总量接近或超过设定高度,则提示所述残膜回收机结束工作。
22、上述的膜土团聚体回收质量调控方法,其中,所述膜土团聚体回收多参数动态耦合质量调控模型包括可升降行走机构液压缸的伸缩长度与起膜托板的旋转角度之间的关系模型,通过控制可升降行走机构液压缸的伸缩长度调节起膜托板的倾斜角度,以准确调整所述起膜托板的入土深度为设定深度。
23、上述的膜土团聚体回收质量调控方法,其中,所述膜土团聚体回收多参数动态耦合质量调控模型还包括限深轮压力与限深轮液压缸伸缩位移关系模型,通过控制限深轮液压缸的伸缩长度调节限深轮压力以调整旋耕深度保持一致。
24、上述的膜土团聚体回收质量调控方法,其中,可升降行走机构液压缸的伸缩长度与起膜托板的旋转角度之间的关系模型为:
25、
26、其中,△l为可升降行走机构液压缸的伸缩长度;lbd1为调整后可升降行走机构悬挂架与可升降行走机构液压缸铰接点到可升降行走机构悬挂架与机架铰接点的距离;ld1d2为调整后可升降行走机构悬挂架与机架铰接点到可升降行走机构液压缸与机架铰接点的距离;lac2为初始时可升降行走机构悬挂架与可升降行走机构液压缸铰接点到可升降行走机构液压缸与机架铰接点的距离;△θ为起膜托板旋转角度;θ2为可升降行走机构悬挂架的调整后倾斜角度。
27、上述的膜土团聚体回收质量调控方法,其中,调节所述起膜托板的入土深度为设定深度,进一步包括:
28、s501,根据所述工业相机检测的残膜回收情况,调整所述起膜托板的入土深度;
29、s502、检测所述起膜托板、可升降行走机构悬挂架和液压缸的初始倾斜角度分别记为θ、θ1、θ3;
30、s503,检测所述起膜托板、可升降行走机构悬挂架和液压缸的调整后倾斜角度分别记为θ′、θ2、θ4;
31、s504,根据检测的倾斜角度信息,计算初始∠c1ac2为(180°-θ1-θ3),调整后∠d1bd2为(180°-θ2-θ4);
32、s505,根据三角形余弦定理,求得并计算得:
33、
34、s506、直线c1c2初始时,与地面保持平行,δθ=θ'-θ等于直线d1d2绕直线c1c2的旋转角度∠d2d1b-θ2;
35、s507、求得:
36、s508、根据求得液压缸的伸缩长度与起膜托板的旋转角度关系为:
37、s509、根据传感器监测液压缸的伸缩长度,形成闭环反馈,不断调整,获得准确起膜托板的旋转角度,最终获取液压缸的伸缩长度与起膜托板的旋转角度之间的数学模型,通过控制液压缸的伸缩长度调节起膜托板的倾斜角度,实现调整起膜托板的入土深度为设定深度;
38、其中,lbd1为调整后可升降行走机构悬挂架与可升降行走机构液压缸铰接点到可升降行走机构悬挂架与机架铰接点的距离;lbd2为调整后可升降行走机构悬挂架与可升降行走机构液压缸铰接点到可升降行走机构液压缸与机架铰接点的距离;ld1d2为调整后可升降行走机构悬挂架与机架铰接点到可升降行走机构液压缸与机架铰接点的距离;lac1为初始时可升降行走机构悬挂架与可升降行走机构液压缸铰接点到可升降行走机构悬挂架与机架铰接点的距离;lac2为初始时可升降行走机构悬挂架与可升降行走机构液压缸铰接点到可升降行走机构液压缸与机架铰接点的距离。
39、上述的膜土团聚体回收质量调控方法,其中,所述限深轮压力与限深轮液压缸伸缩位移关系模型为:p=k1x2+k2x+k3;其中,k1、k2、k3为修正系数;p为轴销传感器检测的限深轮压力,x为拉线位移传感器检测的限深轮液压缸的伸缩位移。
40、上述的膜土团聚体回收质量调控方法,其中,调整所述旋耕松土机构的旋耕深度保持一致,进一步包括:
41、s511、采用轴销传感器检测限深轮的压力,所述轴销传感器检测的限深轮压力为p,拉线位移传感器检测的限深轮液压缸的伸缩位移为x;
42、s512、设定多组试验进行标定,并对其拟合得到限深轮压力与限深轮液压缸伸缩位移关系模型为:p=k1x2+k2x+k3;
43、s513、对所述限深轮液压缸伸缩位移关系模型进行试验验证,修正系数k1、k2、k3;
44、s514、根据传感器监测液压缸的伸缩长度,形成闭环反馈,不断调整,确保旋耕深度保持一致;
45、s515、生成液压缸伸缩长度与限深轮压力之间的数学模型,通过控制液压缸的伸缩长度调节限深轮压力,实现旋耕深度保持一致。
46、为了更好地实现上述目的,本发明还提供了一种残膜回收机,包括上述的膜土团聚体回收质量调控装置。
47、本发明的技术效果在于:
48、本发明能够实时检测各部件作业参数,并自动调控到合适的作业深度,极大提升了膜土团聚体多参数动态耦合回收自动化水平,填补了残膜回收智能调控的空白,从根本上解决残膜回收效率低、作业质量差、自动化程度低等问题,实现高质高效地残膜回收,降低装备故障率,确保农作物增产增效和品质提升。其中通过轴销传感器、倾角传感器、拉线位移传感器、工业相机多传感器动态检测限深轮的压力、旋耕松土机构与起膜托板的倾斜角度、限深轮与可升降行走机构液压缸的伸缩位移、残膜回收情况等多个参数信息,确保调整旋耕松土机构的旋耕深度保持一致,以及调节起膜托板的入土深度到合适位置,以此达到提高残膜回收效率,确保作业质量的目的,实现膜土团聚体回收多参数动态耦合质量调控过程;根据构建可升降行走机构液压缸的伸缩长度与起膜托板的旋转角度之间的数学模型,实现了通过调整可升降行走机构液压缸的伸缩长度,来调节起膜托板倾斜角度,以此达到准确调整起膜托板入土深度,利于提高残膜回收的作业质量,降低装备故障率;根据构建限深轮压力与限深轮液压缸伸缩位移关系数学模型,实现了通过控制液压缸的伸缩长度调节限深轮压力,以确保旋耕深度一致,为起膜托板入土和捡拾残膜提供有利的条件,确保高质高效地残膜回收,降低装备故障率。
49、以下结合附图和具体实施例对本发明进行详细描述,但不作为对本发明的限定。
- 还没有人留言评论。精彩留言会获得点赞!