作业车的制作方法
本发明涉及穿插着转弯行驶进行多个直行作业行驶的作业车。
背景技术:
1、如专利文献1所公开的,插秧机在田地内以穿插着转弯行驶的方式往返于作业行驶路径(直线路径)进行作业行驶。在这样的插秧机中,从直线路径的末端部朝向接下来要行驶的直线路径的始端部,通过手动操作的行驶或者自动转弯行驶来进行转弯行驶。例如,在机体作业行驶于直线路径的期间,当操作者(驾驶员)判断机体已到达转弯开始位置时,插秧机基于操作者的人为操作而朝向下一个直线路径自动地进行自动转弯行驶。
2、此外,上述那样的插秧机中,在直线路径的行驶中,当机体进入距田地的田埂规定距离以内的埂际区域时,有时会进行为避免机体与田埂接触而使机体停车的控制。埂际区域被设定为仍然直行的话与田埂接触的可能性高的区域。
3、然而,由于转弯行驶在埂际区域进行,因此当机体在从直线路径的行驶转变为转弯行驶之前到达了埂际区域时,有时虽然如果适当地进行转弯则机体不会与田埂接触,但机体还是被停止而无法开始转弯行驶。
4、现有技术文献
5、专利文献
6、专利文献1:日本特开2017-123829号公报
技术实现思路
1、发明所要解决的问题
2、本发明的目的在于,即使在直线路径的行驶中进行了当机体到达埂际区域时使机体停止的控制的情况下,也能适当地开始转弯行驶。
3、用于解决问题的方案
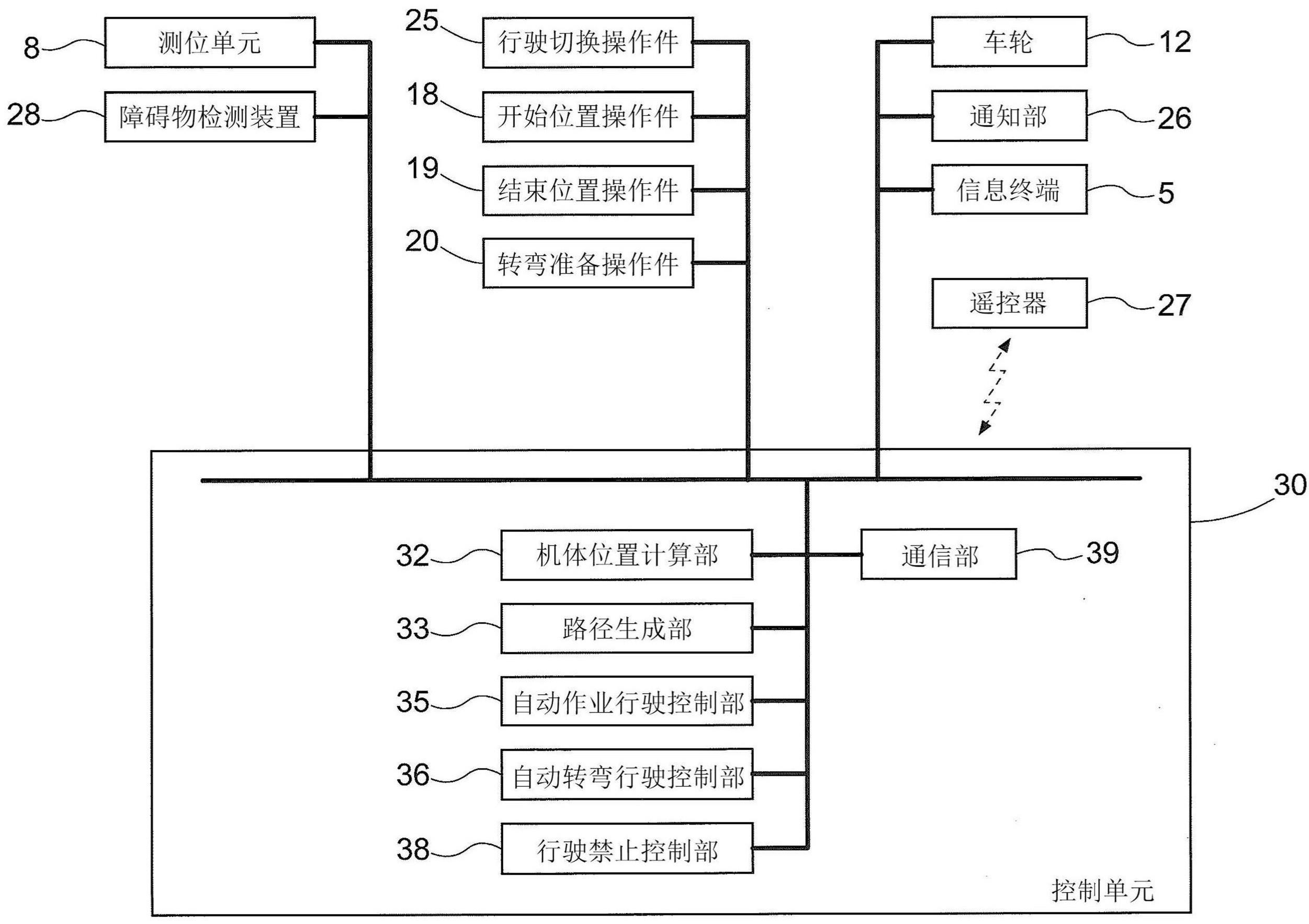
4、为了达成上述目的,本发明的一实施方式的作业车通过反复进行转弯行驶和直行行驶来进行针对田地的作业行驶,并以切换为自动直行模式、转弯准备模式以及自动转弯模式中的任一个模式的方式进行行驶控制,其中,所述作业车具备:机体;机体位置计算部,计算所述机体的位置;路径生成部,生成用于进行所述直行行驶的直线路径;自动作业行驶控制部,在所述自动直行模式和所述转弯准备模式下,基于所述机体的位置,对通过沿着所述直线路径的自动行驶实现的所述作业行驶进行控制;转弯准备操作件,通过被进行接通操作,从所述自动直行模式切换为所述转弯准备模式;转弯操作件,在所述转弯准备模式下接受使所述机体转弯的人为操作;自动转弯行驶控制部,当接收到对所述转弯操作件的人为操作时,从所述转弯准备模式切换为所述自动转弯模式,并且对通过自动行驶实现的所述转弯行驶进行控制;以及行驶禁止控制部,在比所述田地的田埂靠所述田地的内侧处设定埂际边界部,在沿着所述直线路径的自动行驶中,执行当所述机体比所述埂际边界部更接近所述田埂时使所述机体停止的埂际控制功能,所述行驶禁止控制部在所述转弯准备模式下限制所述埂际控制功能。
5、通过埂际控制功能,能抑制机体从埂际边界部进入田埂侧的埂际区域,抑制机体与田埂接触。在此,在埂际区域附近进行自动转弯行驶,有时候即使机体进入了埂际区域,只要在此后适当地进行转弯,机体就不会与田埂接触。相反地,有时候会由于执行埂际控制功能使机体停止而无法在适当的位置进行自动转弯行驶。
6、因此,采用以下结构:设定自动直行模式和转弯准备模式,在自动直行模式中,当操作了转弯准备操作件时,转变为转弯准备模式。进而,采用以下结构:在自动直行模式和转弯准备模式时执行埂际控制功能,并且,在转弯准备模式中,即使机体进入埂际区域,也限制埂际控制功能。由此,在转弯准备模式中,以即使机体进入了埂际区域也不立即停止机体的方式限制埂际控制功能。而且,在限制埂际控制功能的期间,通过在适当的位置操作转弯操作件,能够在适当的位置开始自动转弯行驶。
7、进而,在操作了转弯准备操作件的状态下,通过操作转弯操作件来开始自动转弯行驶。因此,由于通过两个阶段的操作流程开始自动转弯行驶,因此能抑制由于误操作而错误地开始自动转弯行驶,并且能通过进行由不同的操作件实现的两次操作这样的简单的操作来容易地开始自动转弯行驶。
8、此外,也可以是,作为所述转弯操作件,具备第一转弯操作件和第二转弯操作件,所述第一转弯操作件接受使所述机体向右侧或左侧中的一侧方向转弯的人为操作,所述第二转弯操作件接受使所述机体向右侧或左侧中的另一侧方向转弯的人为操作。
9、通过这样的结构,通过第一转弯操作件和第二转弯操作件,能够控制自动转弯行驶的转弯方向,能够进行更加适当的自动转弯行驶。
10、此外,也可以是,所述第一转弯操作件作为在用于生成所述直线路径的示教行驶中接受将行驶中的所述机体的位置设为所述示教行驶的起点的人为操作的开始位置操作件发挥功能,所述第二转弯操作件作为在所述示教行驶中接受将行驶中的所述机体的位置设为所述示教行驶的终点的人为操作的结束位置操作件发挥功能,所述路径生成部计算出包含所述起点和所述终点的直线来作为基本直线,并生成与所述基本直线平行的路径来作为所述直线路径,所述自动转弯行驶控制部根据对所述第一转弯操作件或所述第二转弯操作件进行的人为操作来控制所述转弯行驶。
11、通过这样的结构,能够将在设定示教行驶的起点和终点时被操作的开始位置操作件和结束位置操作件转用作对自动转弯行驶的开始和转弯方向的控制进行操作的第一转弯操作件和第二转弯操作件。其结果是,不用另行设置新的操作件,能够以简易的结构设置对自动转弯行驶的开始和转弯方向的控制进行操作的转弯操作件。
12、此外,也可以是,在沿着由所述路径生成部生成的所述直线路径的自动行驶中,所述路径生成部在所述开始位置操作件被操作的情况下将所述直线路径向右侧或左侧中的一侧方向平行移动规定的距离,在所述结束位置操作件被操作的情况下将所述直线路径向右侧或左侧中的另一侧方向平行移动规定的距离。
13、通过这样的结构,能够在沿着直线路径的自动作业行驶中对直线路径进行微调整,能够容易地进行沿着适当的直线路径的自动作业行驶。
14、进而,开始位置操作件和结束位置操作件在手动行驶中用于示教行驶的起点和终点的登记,在自动直行模式中用于直线路径的移位,在转弯准备模式中用于自动转弯行驶的开始和转弯方向的控制。因此,能够反复使用最小限度的操作件来根据行驶状态执行各种各样的功能。
15、此外,也可以是,所述行驶禁止控制部将经过沿着所述转弯行驶后的所述直线路径的所述作业行驶的开始位置并与所述直线路径正交的区域设定为所述埂际边界部。
16、通过这样的结构,能够基于直线路径的生成和自动直行行驶或自动转弯行驶来容易地计算出作为埂际区域的边界的埂际边界部。
17、此外,也可以是,所述埂际边界部是作为与所述直线路径正交的线的埂际边界线,所述行驶禁止控制部将行驶中的所述直线路径与所述埂际边界线的交点设为埂际位置,计算出作为所述机体的位置与所述埂际位置的距离的埂际距离,并根据所述埂际距离来判断所述机体是否比所述埂际边界线更接近所述田埂。
18、通过这样的结构,能够容易地判断机体进入埂际区域。
19、此外,也可以是,所述行驶禁止控制部在所述埂际距离为零时执行所述埂际控制功能。
20、通过这样的结构,能够容易地判断执行埂际控制功能的定时。
21、此外,也可以是,作为对所述转弯准备模式下的所述埂际控制功能的限制,所述行驶禁止控制部将计算出的所述埂际距离延长规定的长度,并使用延长后的所述埂际距离来判断所述机体是否比所述埂际边界线更接近所述田埂。
22、通过这样的结构,自动直行行驶持续至机体进入了埂际区域将埂际距离延长的长度,在要进一步进入埂际区域时机体被停止。通过将延长的长度设定为即使机体开始转弯也可能会与田埂接触的长度,能够允许在埂际区域开始自动转弯行驶,同时能适当地抑制机体与田埂接触。
23、此外,优选的是,根据所述转弯操作件被操作,以预设的规定的流程进行所述转弯行驶。
24、通过这样的结构,能够容易地进行自动转弯行驶。
25、此外,也可以是,还具备障碍物检测装置,所述障碍物检测装置对包括所述田埂的障碍物进行检测,在距所述机体的位置规定范围内检测到所述障碍物的情况下,所述行驶禁止控制部使所述机体停车。
26、田埂以外也存在机体会接触而造成问题的障碍物。在埂际控制功能以外,还能通过设置直接检测障碍物并在接近障碍物时使机体停车的功能来适当地抑制机体与障碍物接触。
- 还没有人留言评论。精彩留言会获得点赞!