葡萄采摘机器人及使用方法与流程
本发明涉及葡萄采摘机器人,具体为葡萄采摘机器人及使用方法。
背景技术:
1、葡萄采摘机器人是在智能葡萄采摘工作中必不可少的装置之一,其能够利用机械爪对葡萄果园中成熟的葡萄进行采摘,葡萄果园中的地面大多为泥土,有鉴于此,传统的装置不够完善,没有可以方便清洁探头、雷达和摄像头的设施,比价麻烦,而葡萄采摘机器人能够为工作人员提供便捷。
2、现有的葡萄采摘机器人存在的缺陷是:
3、1、专利文件:cn214520209u,一种新型葡萄采摘机器人,“包括履带行走装置、收集装置、剪切装置;履带行走装置通过弹簧钢板等来降低行驶中的颠簸,收集装置主要通过通气网板来减少葡萄的损坏率,用以较佳的收集与存储。剪切装置结合机械手抓用以葡萄的采摘,做到进一步的减少葡萄的损坏。本实用新型对于葡萄可以较为方便的采摘,也可以对于其它要求不高的果实进行采摘,可以做到一机多用,尤其是剪切装置,可以对果树进行简单的修剪,成本经济,灵活适用于各种场合”,传统的装置不够完善,没有可以方便清洁探头、雷达和摄像头的设施,比价麻烦。
4、2、专利文件:cn215991989u,一种带悬臂的葡萄采摘机器人,“包括行走机构、采摘机构、剪切机构、感知系统、储存箱、机架;行走机构安装有悬臂,末端承载行走轮,驱动电机通过驱动电机齿轮连接驱动齿轮,为行走轮提供动力。采摘机构为六自由度机械臂,末端带有软体采摘手。剪切机构安装有剪切刀,剪切刀焊接在剪切滑块上,剪切滑块在剪切导轨中滑动。感知系统包括双目相机和超声波传感器,分别安装在相机支架和机架上,储存箱安装在机架上,盛放葡萄。本实用新型有效地解决了在复杂的农田种植环境下,葡萄采摘机器人适应全地形高质量完成采摘任务的问题”传统的装置不够完善,没有可以为探头和雷达提供撞击保护的设施,不够安全。
5、3、专利文件:cn114027031a,一种葡萄采摘机器人“包括行走机构、多关节臂和采摘器,所述多关节臂的一端与行走机构相连,另一端与采摘器相连,所述采摘器包括筒状的壳体,壳体由上至下依次具有放卷器、剪断器、上束紧器和下束紧器,所述放卷器能放出的连续的将葡萄罩在内部的包装纸,所述剪断器用于剪断葡萄的藤蔓并同时将包装纸进行切割,所述上束紧器和下束紧器分别对包装纸的上下口扎紧。本发明通过采摘器实现对葡萄的包装和采摘,并进一步通过柔性通道和料箱进行收集,进而实现可持续性葡萄的采摘,大大提高了采摘的效率,同时保证了采摘葡萄的品质”传统的装置不够完善,没有可以方便刮下滚轮上粘连的泥土的设施,比较麻烦。
6、4、专利文件:cn113057023a,一种智能仿人葡萄采摘机器人“包括小车、机器人本体、夹持机械左臂、双目立体相机、人机交互面板、剪切机械右臂、遥控器和采果篮;小车包括底座和全向轮,全向轮配置安装在底座底部;机器人本体呈竖直设置的仿人身架体结构,固定竖直安装在底座上;夹持机械左臂和剪切机械右臂分别沿机器人本体的左侧和右侧对称配置安装;双目立体相机和人机交互面板固定设置在机器人本体的前侧上部位置;采果篮固定安装在位于机器人本体前方的底座上;遥控器独立配置设置。有益效果是:设备整体结构及作业过程仿人体设计,智能化程度高,采摘过程科学合理,能够实现葡萄整串的连续摘取和放置,灵活度高,适应性强”传统的装置不够完善,没有可以方便保存转移采摘的葡萄的设施,比较麻烦。
技术实现思路
1、本发明的目的在于提供葡萄采摘机器人及使用方法,以解决上述背景技术中提出的问题。
2、为实现上述目的,本发明提供如下技术方案:
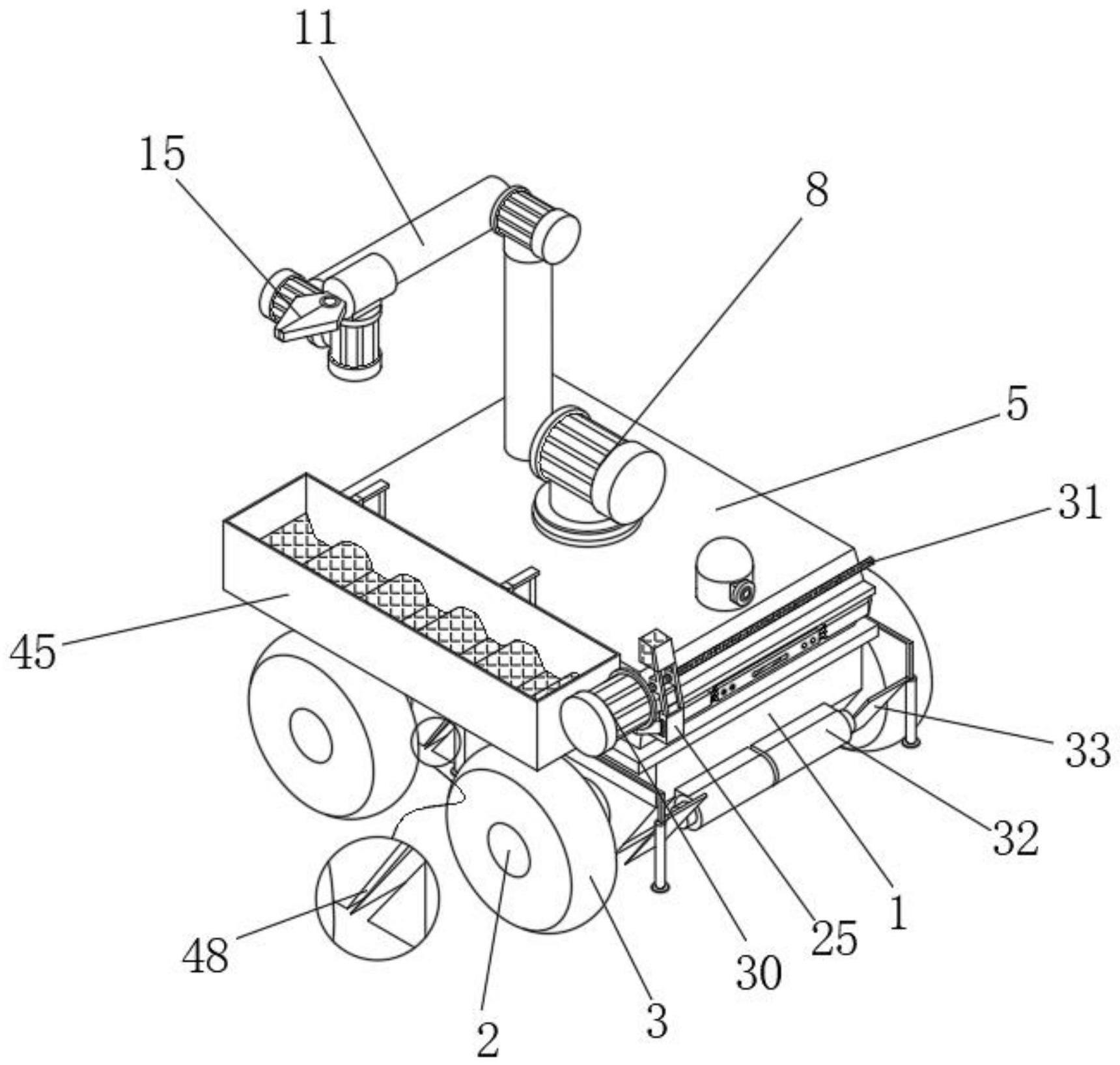
3、葡萄采摘机器人,包括底盘,所述底盘的顶部安装有主体,所述主体的上方安装有摄像头,且所述主体的下方安装有雷达和探头,所述主体上设置有用于清洁摄像头、雷达、探头的清洁装置,所述清洁装置能在水平方向上往复移动以实现对摄像头、雷达、探头的反复擦拭。
4、优选的,所述清洁装置包括电机二及c型板,所述电机二安装于所述主体上,所述电机二的输出端与丝杆的一端传动连接,所述丝杆的另一端能转动的安装于主体上,所述c型板的内侧安装有用于清洁雷达、探头的棉刷,所述c型板的顶部安装有一组导杆,所述导杆螺纹连接于所述丝杆上,且所述导杆的顶部安装有支板,所述支板的背部安装有用于清洁摄像头的海绵。
5、优选的,所述雷达、所述探头均安装于撑板上,所述撑板设置于所述主体的正面,所述主体的正面开设有收纳槽,所述收纳槽位于撑板的背部,所述收纳槽的背部内壁安装有支块,所述支块的外侧安装有弹簧,所述弹簧的正面与撑板的背部相连接。
6、优选的,所述撑板的两侧安装有侧板,所述侧板位于主体的正面,且所述侧板靠近撑板的一端设置有第一撑块,所述撑板的两侧均安装有第二撑块,所述第一撑块与所述第二撑块之间安装有连接条。
7、优选的,所述底盘的两侧安装有滚轮,所述底盘的正面和两侧内壁均安装有一组电动杆,所述电动杆的伸缩端安装有刮板,靠近背部刮板的底盘上贯穿开设有活动槽,所述刮板远离电动杆的一端安装有连接块,所述连接块的顶部安装有支架,且所述连接块与油缸相连,所述油缸的输出端安装有支脚,初始状态下,所述支脚呈悬空状态。
8、优选的,所述主体的内部贯穿顶部安装有由马达驱动的旋转盘,所述旋转盘上安装有电机,电机水平布置,且电机的输出端安装有大臂,大臂的顶部安装有第一电动机,第一电动机水平布置,且第一电动机的输出端安装有小臂,小臂的正面安装有第二电动机,第二电动机的输出端连接有旋转座,旋转座上安装有马达二,马达二的输出端安装有夹爪气缸,夹爪气缸的正面安装有机械爪。
9、一种使用上述葡萄采摘机器人的方法,其工作步骤如下:
10、s1、工作人员可以根据实际情况的需要为该装置充满电力,随后将该装置利用滚轮放置到葡萄园中,并在工作人员的遥控下使底盘通过转轴带动滚轮转动,使滚轮可以在外力的作用下推动该装置进行移动;
11、s2、当该装置移动到合适位置处后工作人员可以控制摄像头在主体的支撑下转动,使摄像头拍摄葡萄,使工作人员可以根据拍摄画面遥控马达启动,使马达通过连接部件带动电机及其输出端安装的所有设施横向转动,同时工作人员可以根据实际情况的需要启动电机,使电机通过输出端带动大臂及其顶端安装的所有设施纵向转动,且可以根据实际情况的需要启动第一电动机,使第一电动机可以在大臂的支撑下带动小臂及其正面安装有所有设施一同纵向转动,同样工作人员可以根据实际情况的需要启动第二电动机,使第二电动机在小臂的支撑下带动马达二及其输出端安装的所有设施一同纵向转动,进而通过夹爪气缸移动机械爪到需要采摘的葡萄的位置处,并利用机械爪夹取采摘葡萄;
12、s3、然后工作人员可以根据实际情况的需要在底盘的支撑下控制电动杆伸长,使其中两个电动杆带动靠近正面的刮板向靠近正面的滚轮的正面移动,同时使另外两个电动杆带动靠近背面的刮板贯穿活动槽移动到靠近背面的滚轮的正面,此时刮板的尖锐端会与对应位置处的滚轮的外侧相接触,同时刮板会通过连接块带动油缸和支架一同移动,随后工作人员即可在连接块的支撑下控制油缸伸长,使油缸利用支脚与地面接触,并在地面的支撑下利用反作用力通过连接块、刮板、电动杆、底盘和转轴抬起滚轮,使滚轮与地面分离,再控制滚轮转动,使刮板可以利用滚轮的旋转动力刮下滚轮外侧粘连的泥土,对滚轮进行清理;
13、s4、之后工作人员可以根据实际情况的需要在侧板的支撑下控制电机二启动,使电机二带动丝杆转动,使丝杆在旋转动力的作用下利用与导杆的螺纹作用推动c型板和支板向右侧移动,同时c型板和支板会分别带动棉刷和海绵一同向背面移动,使棉刷可以在外力的作用下利用自身弹力对撑板、探头和雷达进行刷洗清洁,同时使海绵可以在外力的作用下擦拭清洁摄像头。
14、优选的,在所述步骤s1中,还包括如下步骤:
15、s11、工作人员可以根据实际情况的需要以摄像头拍摄到的画面为参考,并根据雷达和探头的探测结果得知该装置前方的障碍物,并利用上述条件遥控该装置在葡萄果园中进行移动;
16、s12、当该装置在移动过程中其正面受到猛烈撞击时撑板会在外力的作用下和侧板的支撑下通过撑块折断连接条,实现解除对撑板的固定作用,同时弹簧会在自身弹力的作用下和支块的支撑下进行收缩,同时带动撑板向背部移动,使撑板在外力的作用下带动探头和雷达向收纳槽的内侧移动,使主体可以与收纳槽配合为雷达、探头和撑板提供保护,同时弹簧会利用自身反弹力对外力进行缓冲,达到消耗外力的作用,进而为探头和雷达提供撞击保护;
17、优选的,在所述步骤s2中,还包括如下步骤:
18、s21、采摘完葡萄后工作人员可以通过控制电机、马达、第一电动机、第二电动机和马达二转动,使机械爪带动采摘的葡萄移动并放置到定位槽的内侧,使定位槽可以利用自身弧度和软垫的柔软材质对葡萄进行保护,使采摘的葡萄可以妥善保存在储壳的内侧,工作人员可以根据实际情况的需要握住连板通过顶板向上提起储壳,同时连板会在外力的作用下带动插杆从插槽的内侧拔出,同时顶板会在外力的作用下通过杆套带动放置杆从挂钩的内侧取出,进而实现移动储壳及其内侧放置的葡萄的作用,将葡萄移动到合适位置处即可。
19、与现有技术相比,本发明的有益效果是:
20、1、本发明通过安装有侧板,侧板能够为电机二提供稳固支撑,电机二能够在工作人员的操作下带动丝杆转动,丝杆能够在旋转动力的作用下利用螺纹作用根据旋转方向推动导杆作用移动,工作人员可以根据实际情况的需要在侧板的支撑下控制电机二启动,使电机二带动丝杆转动,使丝杆在旋转动力的作用下利用与导杆的螺纹作用推动c型板和支板向右侧移动,同时c型板和支板会分别带动棉刷和海绵一同向背面移动,使棉刷可以在外力的作用下利用自身弹力对撑板、探头和雷达进行刷洗清洁,同时使海绵可以在外力的作用下擦拭清洁摄像头,从而使该装置可以方便对探头、雷达和摄像头进行清洁。
21、2、本发明通过开设有收纳槽,收纳槽能够为弹簧和撑板提供移动空间和保护作用,且能够稳固支撑支块,支块能够为弹簧的一端提供支撑,弹簧具有一定弹性可以在外力的作用下变形,外力消失后则会反弹,该装置在移动过程中其正面受到猛烈撞击时撑板会在外力的作用下和侧板的支撑下通过撑块折断连接条,实现解除对撑板的固定作用,同时弹簧会在自身弹力的作用下和支块的支撑下进行收缩,同时带动撑板向背部移动,使撑板在外力的作用下带动探头和雷达向收纳槽的内侧移动,使主体可以与收纳槽配合为雷达、探头和撑板提供保护,同时弹簧会利用自身反弹力对外力进行缓冲,达到消耗外力的作用,进而为探头和雷达提供撞击保护,使探头和雷达更加安全。
22、3、本发明通过安装有开设有活动槽,活动槽能够为刮板提供移动空间,电动杆能够在工作人员的操作下进行伸缩,刮板的一端比较尖锐,工作人员可以根据实际情况的需要在底盘的支撑下控制电动杆伸长,使其中两个电动杆带动靠近正面的刮板向靠近正面的滚轮的正面移动,同时使另外两个电动杆带动靠近背面的刮板贯穿活动槽移动到靠近背面的滚轮的正面,此时刮板的尖锐端会与对应位置处的滚轮的外侧相接触,同时刮板会通过连接块带动油缸和支架一同移动,随后工作人员即可在连接块的支撑下控制油缸伸长,使油缸利用支脚与地面接触,并在地面的支撑下利用反作用力通过连接块、刮板、电动杆、底盘和转轴抬起滚轮,使滚轮与地面分离,再控制滚轮转动,使刮板可以利用滚轮的旋转动力刮下滚轮外侧粘连的泥土,对滚轮进行清理,从而使该装置可以方便工作人员清理滚轮上粘连的泥土。
23、4、本发明通过安装有挂钩,挂钩能够在主体的支撑下为放置杆提供支撑,放置杆能够为杆套提供支撑,主体能够为插槽提供开设空间,主体与插槽配合能够为插杆提供定位支撑的作用,工作人员可以通过控制电机、马达、第一电动机、第二电动机和马达二转动,使机械爪带动采摘的葡萄移动并放置到定位槽的内侧,使定位槽可以利用自身弧度和软垫的柔软材质对葡萄进行保护,使采摘的葡萄可以妥善保存在储壳的内侧,工作人员可以根据实际情况的需要握住连板通过顶板向上提起储壳,同时连板会在外力的作用下带动插杆从插槽的内侧拔出,同时顶板会在外力的作用下通过杆套带动放置杆从挂钩的内侧取出,进而实现移动储壳及其内侧放置的葡萄的作用,将葡萄移动到合适位置处,从而使该装置可以方便储存移动采摘的葡萄。
- 还没有人留言评论。精彩留言会获得点赞!