一种基于图像识别的智能捕鱼系统及方法与流程
本发明涉及水产捕捞,具体为一种基于图像识别的智能捕鱼系统及方法。
背景技术:
1、人们生活,需要各种食材,包括主食、蔬菜和肉类,从而补充人们的能量和蛋白质,而鱼类是我们日常生活中很常见的一种肉类,同时也是价格比较便宜的肉类,因此,每年都有大量的鱼类的被食用,也是人们获取蛋白质的一个重要来源。而鱼类通常通过池塘或者河流或者海洋进行鱼类养殖,但是鱼类生活在水中,为此,需要从水中捕捞到岸后,才能流入到我们的餐桌上。当前,捕鱼的方式通常是通过拖网,挂网或者诱捕网、地笼等方式进行捕捞。这些捕捞方式,通常捕捞方式比较缓慢,而且捕鱼具有不可控性,现有的相应的捕捞鱼的方式有:
2、专利申请cn107996528a公开了一种利用鱼类对电场的恐惧,通过产生/消除不同位置的电场,来调度鱼类的行为和位置的智能捕鱼方法。利用该方法,本发明提供了一种智能电场网箱捕鱼的装置,其包括以下构件:诱鱼通道用于引诱目标鱼类进入,其包括照明光源、水下的摄像机、诱饵播撒管、接近传感器、多个驱赶电极组;囚鱼网箱用于将进入诱鱼通道、引入的鱼暂时囚困,其上设有多个电极组、出鱼口;收获网箱用于收获已经被捕获的鱼群,包括定位框架、入鱼口可开启/关闭入鱼口的栅栏门;起吊装置用于将收获网箱吊出水面;服务箱为水下装置提供饵料和电场控制等支持服务,包括供料管、多芯信号及控制电缆、供料泵、饵料罐、智能控制器、图像识别单元等。该发明实现按照需要捕捞预设的鱼种,拒绝非目标鱼进入;一年365天全自动运行的高效装置。
3、专利申请cn105010270a公开了养殖水面诱捕太湖白鱼网箱,喂鱼箱有网片墙四面包围,三面设置有喂鱼箱进鱼门与取鱼箱进鱼门,所述喂鱼箱进鱼门与取鱼箱进鱼门上各自安装有喂鱼箱推拉门与取鱼箱推拉门,喂鱼箱推拉门与取鱼箱推拉两端的中部分别连接有一根喂鱼箱推拉门绳与取鱼箱推拉门绳,喂鱼箱推拉门与取鱼箱推拉门在喂鱼箱推拉门绳与取鱼箱推拉门绳的作用下可实现来回开关,所述喂鱼箱两侧的网片墙外侧分别连接有取鱼箱,取鱼箱为窄长形箱体,所述取鱼箱内设置有推鱼板,推鱼板上面连接有推拉杆,所述推鱼板在推拉杆的作用下可实现在取鱼箱内来回活动,所述喂鱼箱、二个取鱼箱、三个推拉门与之间的相互连接均有网片墙、上下网纲绳、定置桩相互固定连接而成。
4、专利申请cn103444642a公开了一种新型远波养殖诱捕鱼网箱,它是在集鱼箱体的中部安装有推拉门,推拉门的左右两侧分别连接有拉门绳,在集鱼箱体的后端连接有进鱼口,进鱼口的顶端安装有防水观察镜,防水观察镜的内腔中安装有视频镜头,视频镜头的上面安装有荧光灯,荧光灯上面安装有远波发音器,远波发音器上连接传输器,传输器下端的传输线与远波发音器、视频镜头相连接,上端与信号线相连接、传输线与计算机相连接。
5、专利申请cn110199961a公开了一种自主避障寻迹识别的多功能智能捕鱼船,所述捕鱼船包括船体,船体包括:捕鱼装置、驱动系统、定位通信系统、图像处理系统、水上自主避障系统、水上自主寻迹系统和控制系统,控制系统接收捕鱼装置、定位通信系统、水上自主避障系统、水上自主寻迹系统、图像处理系统发送的信号和数据进行处理,并向捕鱼装置、驱动系统发送指令控制其运行。该系统可自主避障寻迹到达水质最佳处,鱼类质量最佳处,识别鱼类,并自主进行捕鱼,食品安全得到保证;该系统不需要人为进行控制,只要一键开启,捕鱼船便可自行在水域中工作;捕鱼范围大,移动性大,轻便,不费时,不费力,可捕获大量的鱼类。
6、可见,在现有技术的捕鱼技术方面,还存在以下技术问题:
7、1.传统的鱼类诱捕中,通常也存在利用图像识别系统配合渔网联合进行捕鱼的技术,但是图像识别系统通常只是用于发现鱼类,以便及时收网等操作,但是水中的图像清晰程度通常取决于水质,这样如水质的清晰度不够好,而摄像头固定的话,则不容易发现鱼类,从而不利捕获鱼类;
8、2.在进行鱼类捕获时,有时也会抛洒鱼饵,以便诱导更多鱼类进入渔网,但是鱼类分布并不均匀,也存在不确定性,而传统的捕鱼诱饵无论当前捕鱼区域鱼类的多少,直接进行定量饵料的投喂,这样,如果鱼类过少,则如果投喂的饵料过多,导致诱饵吃不完,进而导致打窝的饵料在水中过久而变质,影响水质,并且浪费饵料,和容易导致鱼类生病;而投放的饵料过少,而鱼类较多,则容易导致鱼类很快吃完饵料而离开,进而起不到诱导鱼类的技术效果。
9、3.现有技术的捕鱼技术中,通常为了诱捕鱼,会投送饵料以便将鱼类诱导,但是不同的鱼类的食物饵料的偏好并不相同,而传统的饵料投喂中并没有考虑鱼类的饵料的偏好,因此容易导致诱捕的鱼类不同,或者未诱捕到合适的鱼类或者抛洒相应的饵料。
10、4.现有技术中,并由于鱼类的生活习性并不相同,如不同的鱼类生活在水层并不相同,但是现有技术中并未对不同的鱼考虑设置不同的抬网系统高度和设置不同的摄像头以便发现和捕获合适的鱼类。
11、面对上述技术问题,目前并未有效的技术方案以解决上述技术问题。
技术实现思路
1、针对上述技术问题,本发明的目的在于提供一种基于图像识别的智能捕鱼系统及方法,以解决上述背景技术中提出的问题。
2、为实现上述目的,本发明提供如下技术方案:
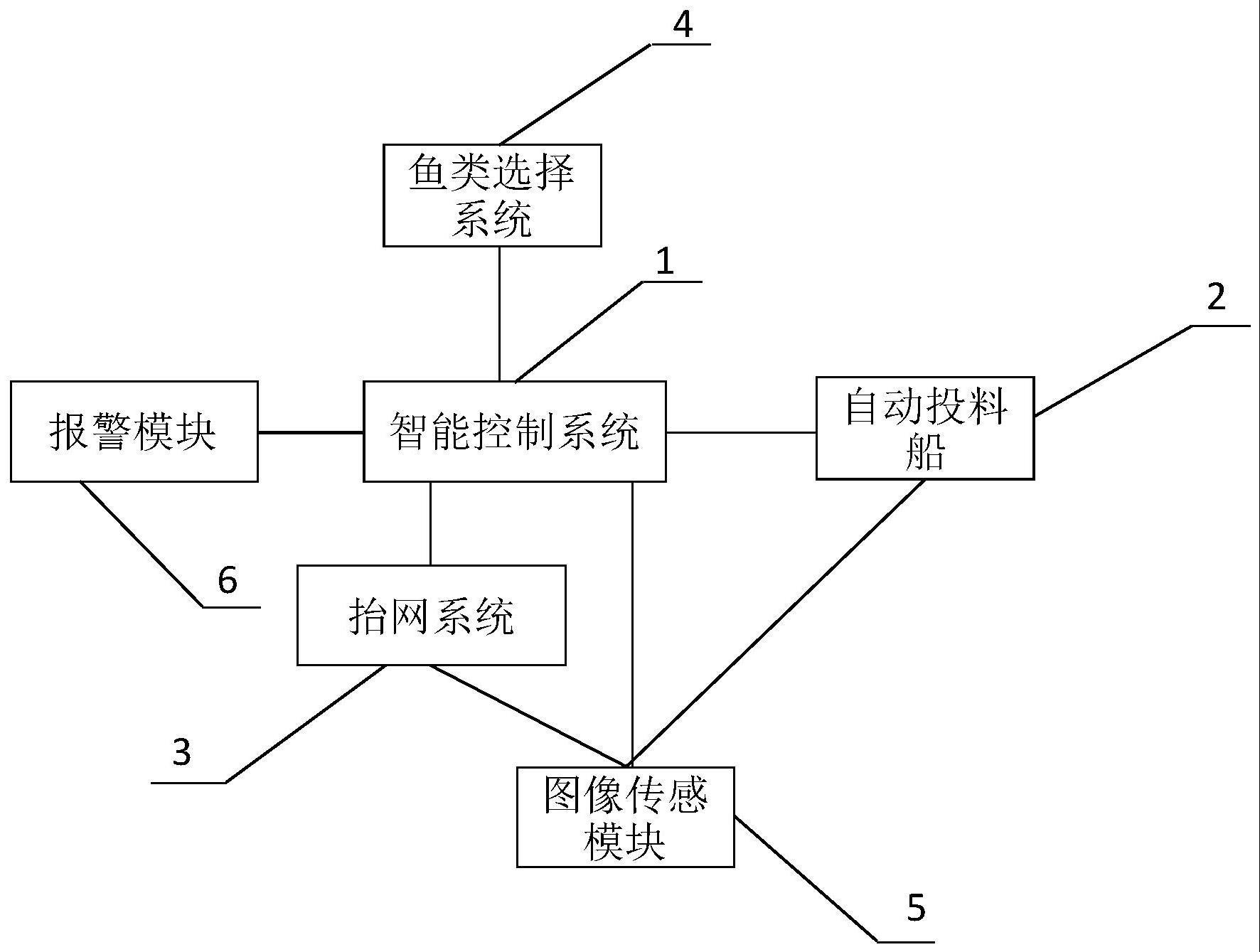
3、一种基于图像识别的智能捕鱼系统,包括智能控制系统、自动投料船、抬网系统、引导分筛系统、图像传感模块和报警模块;所述智能控制系统分别和所述自动投料船、抬网系统、引导分筛系统、图像传感模块和所述报警模块数据通信连接;
4、所述自动投料船为自航式遥控无人船,其上布置有诱鱼饵料舱、定位装置和通信控制系统,所述通信控制系统和所述智能控制系统数据通信连接,从而实现控制自动投料船的航行和诱鱼饵料的投放;所述定位装置用于获取所述自动投料船的位置;
5、所述图像传感模块设置于防水盒内,所述防水盒的一侧为透明的玻璃板,从而使得设置于防水盒内的摄像传感模块能够透过玻璃板获取防水盒外的图像,所述防水盒设于竖直设置的搭载架上,所述搭载架部分设置于水面以上,另外部分设置于水面以下,使得所述防水盒能够在搭载架上上下爬行,从而拍摄水面的图像或者水下图像,并发送中所述智能控制系统;
6、所述智能控制系统基于获取的所述图像,分析鱼类的数量,并基于所述鱼类的数量进行饵料投喂数量的增减,在鱼类的数量少于一定数量时,控制所述自动投料船少量投喂饵料,并在鱼类数量超过一定数量后,进行更多的饵料投喂,以吸引鱼类进入所述抬网系统;
7、当所述抬网系统内的鱼类达到一定数量且数量不再增加时,所述智能控制系统控制所述抬网系统上升以便进行捕鱼,并通过所述报警系统进行报警以便通知及时收集和转移捕获的鱼;
8、所述鱼类选择系统用于对进入所述抬网系统进行筛选,当所述抬网系统内捕获了不属于需要捕获的鱼类时,通过所述鱼类选择系统放回水域。
9、优选的,所述搭载架布置于所述自动投料船上,随着所述自动投料船在一定区域的航行,所述搭载架上的所述图像传感模块获取图像,并通过无线通信的方式发送至所述智能控制系统;
10、所述智能控制系统基于所述图像,判断是否存在鱼类,当存在鱼类时,控制所述自动投料船进行连续少量投料,同时控制所述自动投料船向所述抬网系统航行,从而形成从当前发现鱼类的位置至所述抬网系统的饵料的通路,以便吸引鱼类游向所述抬网系统上方,并在所述抬网系统上方聚集。
11、优选的,所述抬网系统包括抬网、滑轮、固定杆、控制杆、总控制滑轮和控制绳索;所述固定杆包括4个,分别位于所述抬网的4个角位置,并固定于水底,从而用于将所述抬网张开,每个所述固定杆的顶端均设置有滑轮;所述抬网的四角以相邻的2个角成一组,形成2组角,每组角上连接有控制绳索。
12、优选的,所述搭载架还布置于所述固定杆或所述控制杆上,从而在所述图像传感模块在所述搭载架上上下运动,并获取水面和水下的图像,并将所述图像通过无线通信的方式发送至所述智能控制系统;
13、所述智能控制系统基于所述图像,判断是否存在鱼类和鱼类的类型,当存在鱼类时,且鱼类为生活于水面附近的鱼类时,控制所述自动投料船中漂浮水面的饵料投放,当所述存在鱼类且所述鱼类为深水生活鱼类时,控制所述自动投料船投放下沉的饵料投放,从而使得不同的鱼类均能被饵料吸引进入到所述抬网系统。
14、优选的,所述智能控制系统基于图像,判断是否存在鱼类和鱼类的类型,以及基于所述固定杆或所述控制杆进行定位,判断所述鱼类的位置,从而控制所述自动投料船航行至相应的位置进行投放饵料,然而边投放饵料,边航行至所述抬网系统以便将所述鱼类吸引至所述抬网系统。
15、优选的,所述自动投料船包括多个投料舱,每个所述自动投料船的投料舱都填充有一种饵料,在每个所述投料舱都设置有开关,所述开关和所述智能控制系统连接,从而可以单独控制每个投料舱的开闭以实现单独投料;
16、所述图像传感模块获取图像,并发送至所述智能控制系统,所述智能控制系统分析出所述鱼类的类型,并根据所述鱼类的类型控制所述自动投料船对应的投料舱打开,投喂对应的所述鱼类的饵料,以便诱导鱼类。
17、优选的,所述智能控制系统接受所需捕鱼的类型和数量,并进行数据处理,从而获取所述鱼类的生活习性,即属于上水层鱼类或下水层鱼类,并控制所述抬网系统的抬网处于合适的深度,同时控制所述自动投料船的对应投料舱打开,进行投喂饵料,以便起到选择性的投喂饵料吸引相应的鱼类进入所述抬网系统。
18、优选的,所述智能控制系统基于获取的图像分析出所述鱼类的类型,当当前鱼类并不是需要诱捕的鱼类时,则不控制使得所述抬网系统上升,进而不会将所述鱼类诱导至所述抬网系统。
19、另外一方面,本技术还提供一种基于图像识别的智能捕鱼系统的捕鱼方法,包括基于图像识别的智能捕鱼系统,具体的捕鱼方法如下:
20、步骤s1,在适合布设智能捕鱼系统的水域架设相应的所述抬网系统,并在所述自动投料船中填充了相应的饵料;
21、步骤s2,通过所述智能控制系统输入所需捕获的鱼类和鱼类的数量,所述智能控制系统经过计算得出所述鱼类生活特点,从而控制所述抬网系统的抬网降至合适的深度;
22、步骤s3,所述图像传感模块设置于防水盒内,所述防水盒的一侧为透明的玻璃板,从而使得设置于防水盒内的摄像传感模块能够透过玻璃板获取防水盒外的图像,所述防水盒设于竖直设置的搭载架上,所述搭载架部分设置于水面以上,另外部分设置于水面以下,同时,所述防水盒能够在搭载架上爬行,行至合适的深度,从而拍摄图像,并发送中所述智能控制系统;
23、步骤s4,所述智能控制系统基于获取的所述图像,分析鱼类的数量,并基于所述鱼类的数量进行饵料投喂数量的增减,在鱼类的数量少于一定数量时,控制所述自动投料船少量投喂饵料,并在鱼类数量超过一定数量后,进行更多的饵料投喂,以吸引鱼类进入所述抬网系统;
24、当所述抬网系统内的鱼类达到一定数量且数量不再增加时或达到所述输入的所需捕获的鱼类的数量,所述智能控制系统控制所述抬网系统上升以便进行捕鱼,并通过所述报警系统进行报警以便通知及时收集和转移捕获的鱼;
25、步骤s5,当所述搭载架布置于所述自动投料船上时,随着所述自动投料船在一定区域的航行,所述搭载架上的所述图像传感模块获取图像,并通过无线通信的方式发送至所述智能控制系统;
26、所述智能控制系统基于所述图像,判断是否存在鱼类,当存在鱼类时,控制所述自动投料船进行连续少量投料,同时控制所述自动投料船向所述抬网系统航行,从而形成从当前发现鱼类的位置至所述抬网系统的饵料的通路,以便吸引鱼类游向所述抬网系统上方,并在所述抬网系统上方聚集。
27、优选的,当不限定捕获的鱼类时,所述图像传感模块在所述搭载架上上下运动,并获取水面和水下的图像,并将所述图像通过无线通信的方式发送至所述智能控制系统;
28、所述智能控制系统基于所述图像,判断是否存在鱼类和鱼类的类型,当存在鱼类时,且鱼类为生活于水面附近的鱼类时,控制所述自动投料船中漂浮水面的饵料投放,当所述存在鱼类且所述鱼类为深水生活鱼类时,控制所述自动投料船投放下沉的饵料投放,从而使得不同的鱼类均能被饵料吸引进入到所述抬网系统。
29、与现有技术相比,本发明的有益效果是:
30、1、本技术中,通过将图像传感模块设置于防水盒内,设置于防水盒内的摄像传感模块能够透过玻璃板获取防水盒外的图像,所述防水盒设于竖直设置的搭载架上,所述搭载架部分设置于水面以上,另外部分设置于水面以下,使得所述防水盒能够在搭载架上上下爬行,从而拍摄水面的图像或者水下图像,并发送中所述智能控制系统,从而可以获得不同水层的图像,进而获得不同的鱼类,使得更好的发现鱼类并进行捕鱼。
31、2、本技术中,搭载架布置于所述自动投料船上,随着所述自动投料船在一定区域的航行,所述搭载架上的所述图像传感模块获取图像,并通过无线通信的方式发送至所述智能控制系统;从而可以获得更远记录的鱼类,而不局限于抬网系统附近的鱼类;同时当存在鱼类时,控制所述自动投料船进行连续少量投料,同时控制所述自动投料船向所述抬网系统航行,从而形成从当前发现鱼类的位置至所述抬网系统的饵料的通路,以便吸引鱼类游向所述抬网系统上方,并在所述抬网系统聚集,从而捕获更远位置的鱼类,使得捕鱼更加高效。
32、3、本技术在对鱼类进行诱捕时,基于图像去判读发现的鱼类,从而投喂对应的饵料,这样可以尽快诱导鱼类进食,使得更容易捕获鱼类,同时防止投喂了鱼类不喜欢的饵料导致饵料浪费。
33、4、本技术通过所述固定杆或所述控制杆进行定位,判断所述鱼类的位置,从而控制所述自动投料船航行至相应的位置进行投放饵料,然而边投放饵料,边航行至所述抬网系统以便将所述鱼类吸引至所述抬网系统。
- 还没有人留言评论。精彩留言会获得点赞!