收割机的制作方法
1.本实用新型涉及一种具有存储谷粒的谷粒箱的收割机。
背景技术:
2.谷粒箱具有用于将存储的谷粒向外部排出的底部螺旋,将来自发动机的动力经由具有环形转动体的动力传递机构传递至底部螺旋。并且,以往,向环形转动体赋予张紧力的张紧机构设置于比动力部的后端部靠后方侧的位置。
3.就上述结构而言,因组装误差等原因,可能导致相对于张紧机构的引导轮体从动侧旋转体呈沿着旋转轴心方向偏靠一侧的状态。并且,就以往的结构而言,张紧机构呈靠近底部螺旋侧的从动侧旋转体的状态,因此,当出现上述偏靠一侧的状态时,可能导致环形转动体从张紧机构向从动侧旋转体进入的角度沿着旋转轴心较大地倾斜。结果是,环形转动体可能一边被从动侧旋转体较强地摩擦一边受到引导从而因磨损导致过早破损。
技术实现要素:
4.(本实用新型要解决的问题)
5.为此,希望减少将发动机的动力传递至底部螺旋的环形转动体过早地破损。
6.(解决问题的方案)
7.本实用新型的收割机的特征在于,具有:驾驶部;动力部,设置于所述驾驶部的下方;谷粒箱,设置于所述驾驶部的后方;发动机,位于所述动力部内,具有沿着左右方向延伸的输出轴;底部螺旋,设置于所述谷粒箱的底部,通过沿前后方向延伸的旋转轴的旋转而排出谷粒;中继传动轴,设置于所述驾驶部和所述谷粒箱之间,沿着左右方向延伸;第一传动机构,将所述发动机的动力传递至所述中继传动轴;以及第二传动机构,将来自所述中继传动轴的动力传递至所述底部螺旋,所述第一传动机构具备:驱动侧旋转体,设置于所述输出轴;从动侧旋转体,设置于所述中继传动轴;环形转动体,卷绕在所述驱动侧旋转体和所述从动侧旋转体,俯视时沿着前后方向延伸;以及张紧机构,向所述环形转动体赋予张紧力,所述张紧机构设置于所述动力部的内部。
8.根据本实用新型,由于张紧机构设置于动力部的内部,因此,张紧机构的作用于环形转动体的引导轮体位于相对于从动侧旋转体向前方偏离的部位。结果是,即使因组装误差等导致从动侧旋转体相对于张紧机构的引导轮体沿着旋转轴心方向偏靠一侧,环形转动体从张紧机构向从动侧旋转体的进入角度不会沿着旋转轴心方向较大地倾斜,因此,环形转动体不会被从动侧旋转体较强地摩擦引导。
9.因此,能够减少将发动机的动力传递至底部螺旋的环形转动体过早地破损。
10.在本实用新型中,作为优选,所述张紧机构具有张紧轮体,所述张紧轮体从下方抬起所述环形转动体的下侧传动路径部分,向所述环形转动体赋予张力,所述收割机还具有固定式的引导轮体,所述引导轮体向所述环形转动体的上侧传动路径部分朝上施加抬起作用。
11.根据该结构,张紧轮体作用于环形转动体的下侧传动路径部分,朝上抬起施加张力。当如上所述地使环形转动体的下侧传动路径部分朝上移动时,下侧传动路径部分靠近上侧传动路径部分。通过固定式的引导轮体对上侧传动路径部分施加朝上抬起的作用,因此,能够避免下侧传动路径部分接触上侧传动路径部分。
12.在本实用新型中,作为优选,具有纵框架,位于所述驾驶部的后方,从机体框架向上方延伸,支承所述驾驶部的后部,在所述纵框架支承所述引导轮体。
13.根据该结构,纵框架为了支承驾驶部而具有较大的强度,因此,能够稳定地支承受到较大的操作反力的引导轮体。
14.在本实用新型中,作为优选,所述张紧机构具有:张紧轮体,从下方抬起所述环形转动体的下侧传动路径部分,向所述环形转动体施加张力;以及张紧臂,以能够上下移动的方式支承所述张紧轮体,所述收割机还具有纵框架,所述纵框架位于所述驾驶部的后方,从机体框架向上方延伸,支承所述驾驶部的后部,所述张紧臂支承在所述纵框架。
15.根据该结构,纵框架为了支承驾驶部而具有较大的强度,因此,能够稳定地支承受到较大的操作反力的张紧臂。
16.在本实用新型中,作为优选,在所述驱动侧旋转体的附近,具有防止所述环形转动体从所述驱动侧旋转体脱落的防脱落部件。
17.当解除张紧机构赋予的张紧力时,环形转动体对驱动侧旋转体的卷绕状态变得松弛。然而,根据本结构,能够通过防脱落部件防止环形转动体从驱动侧旋转体脱落。
18.在本实用新型中,作为优选,在所述从动侧旋转体的附近,具有防止所述环形转动体从所述从动侧旋转体脱落的防脱落部件。
19.当张紧机构赋予的张紧力解除时,环形转动体对从动侧旋转体的卷绕状态变得松弛。然而,根据本结构,能够通过防脱落部件防止环形转动体从从动侧旋转体脱落。
20.在本实用新型中,作为优选,所述张紧机构具备;张紧轮体,从下方抬起所述环形转动体的下侧传动路径部分,向所述环形转动体赋予张力;以及张紧臂,以能够上下移动的方式支承所述张紧轮体,所述张紧臂能够在向所述环形转动体赋予张紧力的作用姿势和解除张紧力的赋予的非作用姿势之间进行摆动操作,所述收割机具有:驱动操作机构,能够驱动操作所述张紧臂;第一操作线,连动连结所述张紧臂和所述驱动操作机构;以及第二操作线,连动连结在所述张紧臂,能够进行手动操作,所述第二操作线延伸至所述谷粒箱的下方。
21.根据该结构,当驱动操作机构正常动作时,能够通过驱动操作机构经由第一操作线将张紧臂切换成作用姿势,从而将谷粒从谷粒箱排出。并且,当驱动操作机构动作异常时,通过手动操作延伸至谷粒箱的下方的第二操作线,能够将张紧臂切换成作用姿势,从而将谷粒从谷粒箱排出。
附图说明
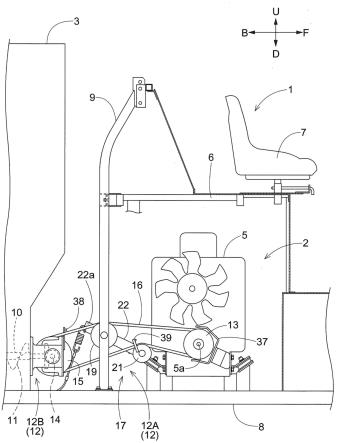
22.图1是联合收割机的前部的侧视图。
23.图2是向底部螺旋传递动力的动力传递机构的俯视图。
24.图3是驱动操作机构的侧视图。
25.附图标记说明
26.1:驾驶部
27.2:动力部
28.3:谷粒箱
29.5:发动机
30.8:机体框架
31.9:纵框架
32.10:旋转轴
33.11:底部螺旋
34.13:驱动侧旋转体
35.14:中继传动轴
36.15:从动侧旋转体
37.16:环形转动体
38.17:张紧机构
39.19:引导轮体
40.21:张紧轮体
41.22:张紧臂
42.23:第一操作线
43.24:驱动操作机构
44.37:第一扶持件(防脱落部件)
45.38:第二扶持件(防脱落部件)
46.40:第二操作线。
具体实施方式
47.下面,根据附图对作为本实用新型的收割机的一个例子的联合收割机的实施方式进行说明。在以下说明中,箭头“f”的方向为机体前侧,箭头“b”的方向为机体后侧,箭头“u”的方向为上侧,箭头“d”的方向为下侧,箭头“r”的方向为右侧,箭头“l”的方向为左侧。
48.如图1所示,联合收割机具有:驾驶部1;动力部2,设置于驾驶部1的下方;以及谷粒箱3,设置于驾驶部1的后方。虽未图示,在机体前部具有一边行驶一边收割作物的收割部,并且,以与谷粒箱3横向排列的状态具有对收割的谷秆进行脱粒处理的脱粒装置。经脱粒装置进行脱粒处理后获得的谷粒存储在谷粒箱3。动力部2具有发动机5,发动机5具有沿着左右方向延伸的输出轴5a。
49.如图1和图2所示,驾驶部1具有:驾驶部框架6,覆盖发动机5的上方;以及驾驶座椅7,支承在驾驶部框架6的上部;等。虽未图示,驾驶部1具有驾驶操作用的多个操作件。在驾驶部1的后方,具有从机体框架8向上方延伸并支承驾驶部的后部的纵框架9。
50.在谷粒箱3的底部具有底部螺旋11,底部螺旋11通过沿着前后方向延伸的旋转轴10的旋转而排出谷粒。在驾驶部1和谷粒箱3之间具有沿着左右方向延伸的中继传动轴14。
51.还具有将发动机5的动力传递至底部螺旋11的动力传递机构12。动力传递机构12具有:第一传动机构12a,将发动机5的动力传递至中继传动轴14;以及第二传动机构12b,将来自中继传动轴14的动力传递至底部螺旋11。
52.第一传动机构12a具有:作为驱动侧旋转体的驱动带轮13,设置于发动机5的输出轴5a;作为从动侧旋转体的从动带轮15,设置于中继传动轴14;作为环形转动体的环形转动带16,卷绕在驱动带轮13和从动带轮15,俯视时沿着前后方向延伸;张紧机构17,向环形转动带16赋予张紧力;以及固定式引导轮体19,向环形转动带16的上侧传动路径部分朝上施加抬起作用。第二传动机构12b在比谷粒箱3的前端部偏靠前侧的部位,由连动连结底部螺旋11的旋转轴10的前端部和中继传动轴14的伞齿轮机构构成。
53.引导轮体19以能够旋转的方式受到设置于纵框架9的横向的固定支轴20的支承。张紧机构17具有:张紧轮体21,从下方抬起环形转动带16的下侧传动路径部分并赋予张力;以及张紧臂22,以能够上下移动的方式支承张紧轮体21。张紧臂22以能够摆动的方式受到固定支轴20的支承。即,引导轮体19和张紧臂22以能够绕同一轴心转动的方式受到固定支轴20的支承。
54.张紧机构17设置于动力部2的内部。纵框架9位于动力部2的后端部。固定支轴20以从纵框架9的左侧面向左侧方横向凸出的状态设置。张紧臂22的长边方向的中途部以能够转动的方式支承在固定支轴20,长边方向的另一端侧向机体前方延伸,在另一端侧的端部以能够绕横轴心转动的方式支承有张紧轮体21。因此,张紧机构17位于比纵框架9偏靠前侧的位置,即动力部2的内部。
55.张紧臂22能够在向环形转动带16赋予张紧力的作用姿势和解除张紧力的赋予的非作用姿势之间摆动操作。张紧臂22的在作用姿势和非作用姿势之间的切换操作是通过以第一操作线23连结的驱动操作机构24完成的。
56.张紧臂22的转动操作部22a从固定支轴20的枢轴支承部向张紧轮体21的相反侧延长形成。转动操作部22a俯视时朝向左侧方呈l字形弯曲。转动操作部22a连结在第一操作线23的内线23a(参照图3)的一端部。外线23b的一端部支承在设置于机体框架8的承接部26。
57.以位于谷粒箱3的左后方侧部位的下侧的状态具有驱动操作机构24。如图3所示,驱动操作机构24具有:扇形齿轮28,受到电动马达27的绕水平轴心的转动操作;凸轮29,随着扇形齿轮28的转动而绕同一轴心转动;以及操作臂30,通过使凸轮29作用于凸轮随动件30a的方式受到摆动操作。
58.在操作臂30的摆动端部连结第一操作线23的内线23a的另一端部。外线23b的另一端部支承在设置于驱动操作机构24的收纳箱24a的承接部31。
59.在扇形齿轮28的外周部形成齿轮部32,由电动马达27驱动的小齿轮33与齿轮部32啮合。当驱动小齿轮33使扇形齿轮28转动时,操作臂30因凸轮29的引导作用而摆动,经由第一操作线23操作张紧臂22。当第一操作线23松弛时,张紧臂22因来自环形转动带16的反力而呈非作用姿势。当使操作臂30摆动从而拉动操作第一操作线23时,张紧臂22与之连动从而受到摆动操作,进而使张紧轮体21向上方移动,从而切换成作用姿势。
60.扇形齿轮28的齿轮部32形成于圆周方向上的一部分。当扇形齿轮28移动至动作界限时,形成于扇形齿轮28的侧面的卡定销35抵接在设置于收纳箱24a侧的抵接部36,从而限制扇形齿轮28进一步转动。例如,在扇形齿轮28的圆周方向的端部未形成齿轮部32的状态下,当小齿轮33登上未形成齿轮部32的部位而停止时,可能给支承电动马达27的旋转轴的支承托架27a施加过度的力,导致其破损。然而,根据本结构,能够避免上述不利情况。
61.在驱动带轮13的附近,具有作为防脱落部件的第一扶持件37,第一扶持件37防止
环形转动带16从驱动带轮13脱落。第一扶持件37由侧视时呈大致u字形的板体构成,从径向外方侧覆盖驱动带轮13的外周部的卷绕有环形转动带16的大部分区域。第一扶持件37支承在发动机5的侧壁。
62.在从动带轮15的附近,具有作为防脱落部件的第二扶持件38,第二扶持件38防止环形转动带16从从动带轮15脱落。第二扶持件38形成圆棒状,以位于环形转动带16的上侧传动路径部分的靠近从动带轮15的部位的上侧的状态设置。第二扶持件38支承在收纳第二传动机构12b的箱上。
63.在张紧轮体21的附近,具有作为防脱落部件的第三扶持件39,第三扶持件39防止环形转动带16从张紧轮体21脱落。第三扶持件39由前后方向观察时呈大致u字形的板体构成,以位于环形转动带16的下侧传动路径部分的靠近张紧轮体21的部位的上侧的状态设置。第三扶持件39支承在张紧臂22。
64.除了第一操作线23,还具有以能够手动操作的方式连动连结张紧臂22的第二操作线40。第二操作线40与第一操作线23同样,内线40a的一端部连结在张紧臂22的转动操作部22a,并且,外线40b的一端部支承在与第一操作线23相同的承接部26。
65.第二操作线40延伸至谷粒箱3的下方。第二操作线40的内线40a的另一端部通过卡定件(未图示)保持在位于谷粒箱3的右侧端部的下方侧的部位。外线40b的另一端部由承接件31支承。当进行手动操作时,将卡定件对内线40a的另一端部的卡定解除,从而手动进行拉动操作。
66.(其他实施方式)
67.下面,列举其他实施方式。
68.张紧臂22也可以支承在除纵框架以外的其他支承部件。
69.也可以将引导轮体19支承在除纵框架9以外的其他支承部件。并且,也可以不设置引导轮体。
70.张紧轮体21也可以对环形转动带16的下侧传动路径部分下压从而赋予张力。
71.也可以只具有第一扶持件37、第二扶持件38以及第三扶持件39中的至少一个,还可以具有其中的2个。此外,也可以不具有任何扶持件。
72.也可以不具有第二操作线40,并且,还可以不采用驱动操作机构24,始终通过手动操作对张紧臂22在作用姿势和非作用姿势之间切换。
73.(产业上的可利用性)
74.本实用新型能够适用于联合收割机、玉米收割机等收割机。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1