一种太阳能除草机器人
1.本实用新型涉及农业机器技术领域,具体为一种太阳能除草机器人。
背景技术:
2.农业作为立国之本,一直以来都受到全社会的关注,目前,我国正大力推广智慧农业,随着现代科学技术和人工智能的不断发展,大量智能农机装备应用于农业生产的各个环节,传统的石油农业正在慢慢向智能农业,绿色农业转变,不仅提高了农业生产效率,而且大大降低了劳动力成本。
3.农田杂草一直以来都是农业种植中亟须解决的问题,目前我国的农业除草方式主要有人工除草和化学除草,但存在耗费大量人力物力或是易造成环境污染的局限性。智能农业除草机器人融合了环境分析、路径导航、视觉识别和运动控制等多种技术,是应用于精准农业中除草作业的智能机器人系统。然而现有大部分的除草机机器人仅仅能拔除杂草,供电方式多为实时连接电源或由蓄电池供电,导致除草机的作业范围和作业时间受限。
技术实现要素:
4.(一)解决的技术问题
5.针对现有技术的不足,本实用新型提供了一种太阳能除草机器人,解决了上述背景技术中提出的目前智能农业除草机器人由于供电方式的限制导致作业范围和作业时间受限的问题。
6.(二)技术方案
7.为实现以上目的,本实用新型通过以下技术方案予以实现:一种太阳能除草机器人,包括:中控台、麦克纳姆轮、编码电机、并联多自由度执行机构、平台升高支架、机体搭载平台、太阳能板、蓄电池;
8.所述机体搭载平台的四角底部分别安装有四根平台升高支架;
9.所述每根平台升高支架地底部安装有一个麦克纳姆轮,每个麦克纳姆轮由一个编码电机驱动;
10.所述机体搭载平台正下方安装有并联多自由度执行机构;
11.所述机体搭载平台上平面的后方两侧固定安装有太阳能板;
12.所述机体搭载平台前方安装有中控台。
13.优选地,所述并联多自由度执行机构,包括:第一执行器高度调节机构、第二执行器高度调节机构、第一主轴、第二主轴、末端执行器安装位、旋转电机、三组主传动杆、三组副传动杆、主轴转向电机、执行器位置角度调节结构;
14.所述主轴转向电机转动带动第一主轴和第二主轴旋转并调整角度;
15.所述主轴转向电机转动带动第一执行器高度调节机构、第二执行器高度调节机构并驱动副传动杆带动末端执行器安装位进行升降运动;
16.所述执行器位置角度调节机构下安装有三组旋转电机,所述每组旋转电机带动对
应的每组主传动杆和副传动杆运动,并对末端执行器安装位进行角度调节。
17.优选地,所述副传动杆与所述末端执行器安装位的边沿进行连接,各个连接点位置关于所述末端执行器安装位的中点中心对称;所述末端执行器为安装位为圆环形用以安装除草执行部件。
18.优选地,所述机体搭载平台下方还安装有包含多个led灯珠的光源组;led灯珠所述均匀分布在搭载平台下。
19.优选地,所述太阳能板连接光源转换器、传感器、升压稳压电路和透镜耦合系统;所述太阳能板收集的电能经控制器向所述蓄电池充电;所述蓄电池的电能通过逆变器向除草机器人的各个部件提供电源。
20.优选地,所述中控台安装在所述机体搭载平台;
21.所述中控台上设置有调节按键和led显示屏幕。
22.优选地,还包括识别摄像头,所述识别摄像头安装在所述并联多自由度执行机构中,固定于除草执行部件上。
23.(三)有益效果
24.本实用新型提供了一种太阳能除草机器人。具备以下有益效果:
25.本实用新型针对现有的智能除草机器人在工作中存在的局限性,能够利用太阳能驱动行进,不再受有线电源和蓄电池电量不足的限制;同时为了除草机器人实现全方位运动灵活机动,采用麦克纳姆轮通过转向电机、编码电机驱动控制,协调各轮在转向时的速度和转角使除草机器人适合于农用环境;依靠并联机构实现空间内多自由度运动的执行机构,可以实现机器人在农田内作业全覆盖,减少对农作物破坏,更稳固,更高效,更环保的完成精确除草作业。
附图说明
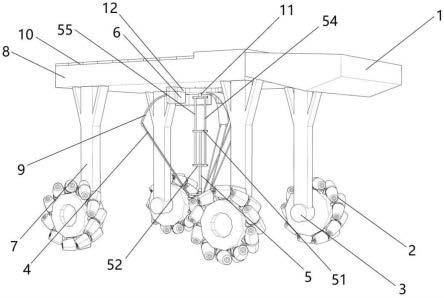
26.图1为本实用新型提供的一种太阳能除草机器人的结构立体图;
27.图2为本实用新型提供的一种太阳能除草机器人的另一视角结构立体图;
28.图3为本实用新型提供的一种太阳能除草机器人的仰视视角结构立体图
29.图4为本实用新型图1中并联多自由度执行机构结构放大图;
30.图5为本实用新型图1中并联多自由度执行机构另一视角结构放大图;
31.图中:1中控台、2麦克纳姆轮、3编码电机、4副传动杆、5并联多自由度执行机构、51第一执行器高度调节结构、52第二执行器高度调节结构、53末端执行部件安装位、54第一主轴、55第二主轴、6旋转电机、7平台升高支架、8机体搭载平台、9主传动杆、10太阳能板、11主轴转向电机、12执行器位置角度调节结构。
具体实施方式
32.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述。
33.本实用新型实施例提供一种太阳能除草机器人,如图1-5所示,包括:中控台1、麦克纳姆轮2、编码电机3、并联多自由度执行机构5、平台升高支架7、机体搭载平台8、太阳能板10、蓄电池;
34.所述机体搭载平台8的四角底部分别安装有四根平台升高支架7;
35.所述每根平台升高支架7底部安装有一个麦克纳姆轮2,每个麦克纳姆轮2由一个编码电机驱动3;
36.所述机体搭载平台8正下方安装有并联多自由度执行机构5;
37.所述机体搭载平台8上平面的后方两侧固定安装有太阳能板10;
38.所述机体搭载平台8前方安装有中控台1。
39.优选地,所述并联多自由度执行机构5,包括:第一执行器高度调节机构51、第二执行器高度调节机构52、第一主轴54、第二主轴55、末端执行器安装位53、旋转电机6、三组主传动杆9、三组副传动杆4、主轴转向电机11、执行器位置角度调节结构12;
40.所述主轴转向电机11转动带动第一主轴54和第二主轴55旋转并调整角度;
41.所述主轴转向电机11转动带动第一执行器高度调节机构51、第二执行器高度调节机构52并驱动副传动杆4带动末端执行器安装位53进行升降运动;
42.所述执行器位置角度调节机构12下安装有三组旋转电机6,所述每组旋转电机6带动对应的每组主传动杆9和副传动杆4运动,并对末端执行器安装位53进行角度调节。
43.优选地,所述副传动杆4与所述末端执行器安装位53的边沿进行连接,各个连接点位置关于所述末端执行器安装位53的中点中心对称;所述末端执行器为安装位53为圆环形用以安装除草执行部件;
44.在本实施例中,执行机构可进行多自由度的调节,在三维空间内多自由度运动,依靠并联机构实现空间内多自由度运动的执行机构,可以实现机器人在农田内全覆盖工作,减少对农作物破坏,更稳固,更高效,更环保的完成精确除草作业。
45.优选地,所述机体搭载平台8下方还安装有包含多个led灯珠的光源组;led灯珠所述均匀分布在搭载平台下。
46.优选地,所述太阳能板10连接光源转换器、传感器、升压稳压电路和透镜耦合系统;所述太阳能板10收集的电能经控制器向所述蓄电池充电;所述蓄电池的电能通过逆变器向除草机器人的各个部件提供电源;
47.在一个实施例中,采用180w18v的太阳能板进行能量收集,实际工作电流约为9.23a,包含太阳能电池板的供能系统可以实现不需要电源实时供电,还可以储存电量,在雨天或夜晚等光照不充足的情况下,持续输出电量继续进行作业,以实现长时间的除草作业;
48.优选地,所述除草机器人还包括:太阳能储能功能模块,可以依靠太阳能为智能除草机器人进行供电。不需要电源实时供电,还可以储存电量。
49.优选地,所述中控台1安装在所述机体搭载平台8;
50.所述中控台上1设置有调节按键和led显示屏幕。
51.优选地,还包括识别摄像头,所述识别摄像头安装在所述并联多自由度执行机构5中,固定于除草执行部件上。
52.优选地,所述麦克纳姆轮安装在机体搭载平台8下方,且相同的麦克纳姆轮(左旋轮或右旋轮)放在机体搭载平台8底部的对角线上。
53.尽管已经示出和描述了本实用新型的实施例,对于本领域的普通技术人员而言,可以理解在不脱离本实用新型的原理和精神的情况下可以对这些实施例进行多种变化、修
改、替换和变型,本实用新型的范围由所附权利要求及其等同物限定。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1