一种食用菌自动化采收机器人系统的制作方法
1.本实用新型涉及农业自动化装备的技术领域,具体为一种食用菌自动化采收机器人系统。
背景技术:
2.食用菌产业是非耕地生产、农业生产废弃物循环利用、经济效益高、市场潜力大、建设资源节约型和环境友好型产业。目前,食用菌的种植环境已逐渐从非结构化向结构化、标准化的厂房式种植方式转变,但是,食用菌的采摘、存储、转运等环节仍然大量依赖人工作业,食用菌的产量和经济利润增长受到限制。而现有的机械化采摘装备急需提高自动化程度,无法进一步推广应用,究其原因,是因为如下技术难点:1菇床层高仍过低,自动化设备部署困难,需要定制化设计;2菌类生长密集,纹理稀少,尺寸各异,视觉检测存在挑战;3菌类生长姿态各异,最佳采摘作业部位—菌盖非保持垂直姿态;4菌类生长姿态各异,要求自动化采摘设备具有多自由度柔性机构;5菌类表面柔软脆弱,采摘不当容易导致表面划伤、破损;6现有的自动化采摘设备缺少自动运收环节,自动化程度低。
3.故急需研发一款能够适用于多层食用菌层自动化采收作业的机器人系统,从而提高自动化率、并确保采收的效率。
技术实现要素:
4.针对上述问题,本实用新型提供了一种食用菌自动化采收机器人系统,其以自动化、标准化、规模化的作业方式解决了人工成本高、作业效率低的问题,进而节省人力成本,提升食用菌采摘及转运的效率,便于提高食用菌种植产量和利润,加速农业装备自动化、智能化转型发展。
5.一种食用菌自动化采收机器人系统,其针对具有若干高度层的食用菌种植菇床进行食用菌采摘作业,其特征在于,其包括:
6.采摘机器人,其包括框架结构、两侧轮组、多轴机械臂模组、真空吸附工具、相机模块,所述框架结构的宽度方向的两侧位置分别设置有侧轮组,两侧的侧轮组之间的间距确保不压附食用菌、且位于每层的菌床的宽度边界区域位置布置,所述框架结构上集成有多轴机械臂模组,所述多轴机械臂模组的输出端设置有中空吸附工具,所述框架结构的上表面设置有所述相机模块,所述相机模块用于捕获需要采摘的食用菌的位姿;
7.升降换层机,其包括主体框架、升降平台模块、定位相机,所述主体框架的中心区域设置有所述升降平台模块,所述升降平台模块沿着主体框架的高度方向轨道升降作业,所述升降平台模块用于升降转运采摘机器人,所述定位相机设置在升降平台模块朝向食用菌种植菇床的表面位置,所述定位相机用于捕捉菇床每层横梁的端部位置,进而确定位于升降平台模块上的采摘机器人相对于横梁的位置,实现二者精准对接;
8.以及转运机器人,其包括自主导航移动机器人、食用菌剪根工具、下层框架、上层框架、升降机模块、下部转运模块,食用菌剪根机x y轴模块组件,所述自主导航移动机器人
的上部设置有下层框架,所述下层框架的一侧上部设置有所述上层框架,所述上层框架内设置有所述升降机模块,所述升降机模块的输出端包括上部的装载台、下部的转运模块,所述装载台上集成有食用菌剪根机x y轴模块组件,食用菌剪根机x y轴模块组件的输出端设置有食用菌剪根工具,食用菌剪根工具将采摘的食用菌剪除根茎后置于转运模块的对应位置,所述转运模块将食用菌、根茎分类转运至上层框架的对应回收框;
9.所述升降换层机布置并锁定于食用菌种植菇床的一端,所述采摘机器人在菇床层间作业,所述转运机器人设置于所述食用菌种植菇床的侧面,执行采摘作业时,所述转运机器人在不同高度侧菇床通道运动时,执行食用菌的剪根、分类和转运任务,所述转运机器人在菇房内自主导航运动。
10.其进一步特征在于:
11.所述采摘机器人的每侧轮组均包括前轮、后轮,其中一个轮子为主动轮、另一个为从动轮,每侧的主动轮分别设置有独立的驱动电机;
12.其中一侧轮组为导向轮组,另一侧轮组为浮动轮组,确保采摘机器人沿着菇床层的长度方向稳定可靠行进作业;
13.所述多轴机械臂模组包括xyz三轴直线模块、第一旋转关节、第二旋转关节、第三旋转关节,其中xyz三轴直线模块的y向输出端连接所述第一旋转关机的输入端,所述第一旋转关机的输出端连接所述第二旋转关机的输入端,所述第二旋转关机的输出端连接所述第三旋转关机的输入端,所述第三旋转关机的输出端连接所述真空吸附工具;
14.所述xyz三轴直线模块包括x轴直线模块、基础y轴直线模块、增程y轴直线模块、z轴直线模块;
15.所述相机模块包括若干个相机安装支架、若干个rgb-d相机,每个相机安装支架底部固连在x轴直线模块的支撑梁上,每个rgb-d相机安装在相机安装支架的前端;
16.所述框架结构上还包括有特征码标签组,所述特征码标签组包括若干个表面带有明确特征图案的标签,所有的标签粘贴在所述框架结构的朝向转运机器人的对应表面;
17.所述转运机器人包括有特征码标签识别相机,所述特征码标签识别相机安装在升降机模块的朝向标签的位置,所述特征码标签识别相机对特征码标签组进行拍照,然后对采集的图像进行处理分析,判断采摘机器人和转运机器人的相对位置,所述自主导航移动机器人根据识别的结果进行二次定位,转运机器人调整运动至合理的相对位置;
18.所述升降换层机还包括有自主充电板,所述自主充电主板对应布置于主体框架的底部位置的自动充电层,所述采摘机器人设置有自主充电铜板,当采摘机器人的供电电池电量低于预警值,升降平台模块载着采摘机器人运动至自动充电层,自主充电板与采摘机器人的自主充电铜板接触,启动充电;
19.所述下层框架的宽度方向两侧分别顺次设置有根茎回收框、食用菌回收框,所述下部转运模块包括有根茎回收盒、食用菌回收盒、两伸缩气缸,所述根茎回收盒的朝向根茎回收框的端部设置有预留开口处,所述食用菌回收盒的朝向所述食用菌回收框的端部设置有预留开口处,所述根茎回收盒的底部连接其中一个伸缩气缸的输出端,所述食用菌回收盒的底部连接另一个伸缩气缸的输出端,两个伸缩气缸驱动对应的回收盒将根茎、食用菌倒入对应的回收框内。
20.采用本实用新型后,其具有如下优点:1完整的食用菌的采、收、运作业设备,涵盖
了食用菌的自动化采摘、自动化二次处理、自动化分类、自动化转运等全流程的现场作业工序;2本实用新型采用的采摘机器人,配置相机系统,能够识别无序分布、姿态各异的多种类型食用菌,引导多自由度的采摘机械臂和柔性的真空吸附工具执行采摘作业,实现柔性化、无损化采摘指定规格尺寸的食用菌;3采用的升降换层机,能够被快速移动部署于不同高度的菇床,提高换产效率,实现对升降平台模块高精度自主定位,能够解决菇床层高间距不一致导致的采摘机器人与菇床对接的问题,确保采摘机器人平稳地从升降换层机运动至菇床的作业层;4采用的转运机器人,实现与采摘机器人高精度对接,并对食用菌进行二次深加工。能够自主地在狭窄的食用菌种植房内运动,与外部流水线进行对接,对已经满筐的食用菌收集筐和根茎回收筐的转运和换筐,实现无人值守式转运作业。
附图说明
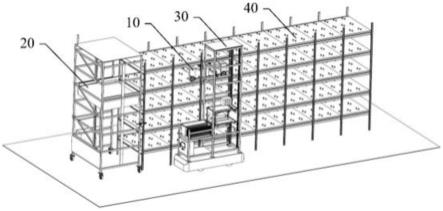
21.图1为本实用新型的系统结构立体示意图;
22.图2为本实用新型的采摘机器人的后视图;
23.图3为图2的俯视图;
24.图4为图2的侧视图;
25.图5为本实用新型的采摘机器人主视局部剖视示意图以及部分局部放大图;
26.图6为本实用新型的采摘机器人的剖视结构示意图;
27.图7为本实用新型的采摘机器人的横向中线后向剖视标注图
28.图8为本实用新型的采摘机器人的立体图;
29.图9为图8的a处局部放大结构示意图;
30.图10为本实用新型的升降换层机的立体示意图一;
31.图11为本实用新型的升降换层机的立体示意图二;
32.图12为本实用新型的升降换层机的立体示意图三;
33.图13为图12的b处局部放大图;
34.图14为本实用新型的升降换层机的立体示意图四;
35.图15为图14的c处局部放大图;
36.图16为本实用新型的转运机器人的立体图一;
37.图17为图16的d处局部放大图;
38.图18为图16的e处局部放大图;
39.图19为本实用新型的转运机器人的立体图二;
40.图20为图19的f处局部放大图;
41.图21为本实用新型的转运机器人的升降平台模块的立体图一;
42.图22为图21的g处局部放大图;
43.图23为图21的h处局部放大图;
44.图24为本实用新型的转运机器人的升降平台模块的立体图二。
具体实施方式
45.一种食用菌自动化采收机器人系统,其针对具有若干高度层的食用菌种植菇床40进行食用菌采摘作业,见图1-图24,其包括采摘机器人10、升降换层机20、以及转运机器人
30;采摘机器人10包括框架结构、两侧轮组、多轴机械臂模组、真空吸附工具106、相机模块107,框架结构的宽度方向的两侧位置分别设置有侧轮组,两侧的侧轮组之间的间距确保不压附食用菌、且支承于每层的菌床的宽度边界区域布置,框架结构上集成有多轴机械臂模组,多轴机械臂模组的输出端设置有中空吸附工具106,框架结构的上表面设置有相机模块107,相机模块107用于捕获需要采摘的食用菌的位姿;
46.升降换层机20包括主体框架21、升降平台模块22、定位相机26,主体框架的中心区域设置有升降平台模块,升降平台模块22沿着主体框架21的高度方向轨道升降作业,升降平台模块22用于升降转运采摘机器人10,定位相机26设置在升降平台模块22朝向食用菌种植菇床40的表面位置,定位相机26用于捕捉菇床每层横梁的端部位置,进而确定位于升降平台模块上的采摘机器人相对于横梁的位置,实现二者精准对接;
47.转运机器人30包括自主导航移动机器人31、食用菌剪根工具32、下层框架33、上层框架34、升降机模块35、下部转运模块,食用菌剪根机x y轴模块组件,自主导航移动机器人31的上部设置有下层框架33,下层框架33的一侧上部设置有上层框架34,上层框架34内设置有升降机模块35,升降机模块35的输出端包括上部的装载台352、下部的转运模块,装载台352上集成有食用菌剪根机x y轴模块组件,食用菌剪根机x y轴模块组件的输出端设置有食用菌剪根工具32,食用菌剪根工具32将采摘的食用菌剪除根茎后置于转运模块的对应位置,转运模块将食用菌、根茎分类转运至上层框架34的对应回收框;
48.升降换层机20布置并锁定于食用菌种植菇床40的一端,采摘机器人10在菇床层间作业,转运机器人30设置于食用菌种植菇床40的侧面,执行采摘作业时,转运机器人30在不同高度侧菇床通道运动时,执行食用菌的剪根、分类和转运任务,转运机器人30在菇房内自主导航运动。
49.具体实施例中,采摘机器人10包括前部框架11、左侧主动轮模块12、右侧主动轮模块13、后部框架14、左侧被动轮模块15、右侧被动轮模块16、中间连接框架17、x轴直线模块18、基础y轴直线模块19、增程y轴直线模块101、z轴直线模块102、第一旋转关节103、第二旋转关节104、第三旋转关节105、真空吸附工具106、相机模块107、特征码标签组108;
50.前部框架11和后部框架14通过中间连接框架17的左侧下部连杆171、左侧上部连杆172、右侧下部连杆173、右侧上部连杆174固连。采摘机器人10的电控系统硬件109安装于前部框架11内部,前部框架11的上部中线采用凹槽结构设计;
51.采摘机器人10的供电电池安装于后部框架14内部,后部框架14的上部中线采用凹槽结构设计,采摘机器人10的自主充电铜板1010安装于后部框架14的后表面;前部框架11和后部框架14通过中间连接框架17固连;左侧主动轮模块12的传动轴121安装于前部框架11左下部的轴承孔内,左侧主动轮模块12的主动轮122采用双挡边设计,中间凹槽可与菇床横梁形成仿形嵌套滚动副,左侧主动轮模块12的主动轮122安装于左侧主动轮模块12的传动轴121外侧,左侧主动轮模块12的被动带轮123与左侧主动轮模块12的主动轮122通过左侧主动轮模块12的传动轴121同轴固连,左侧主动轮模块12的被动带轮123安装于左侧主动轮模块12的传动轴121内侧,左侧主动轮模块12的驱动电机124安装于前部框架11的左侧板上部,左侧主动轮模块12的减速器125安装于左侧主动轮模块12的驱动电机124的输出端,左侧主动轮模块12的主动带轮126安装于左侧主动轮模块12的减速器125的输出端,左侧主动轮模块12的主动带轮126和左侧主动轮模块12的被动带轮123通过同步带连接;右侧主动
轮模块13的传动轴131安装于前部框架11右侧下部的轴承孔内,右侧主动轮模块13的主动轮132采用单挡边设计,右侧主动轮模块13的主动轮132安装于右侧主动轮模块13的传动轴131外侧,右侧主动轮模块13的被动带轮133与右侧主动轮模块13的主动轮132通过右侧主动轮模块13的传动轴131同轴固连,右侧主动轮模块13的被动带轮133安装于右侧主动轮模块13的传动轴131内侧,右侧主动轮模块13的驱动电机134安装于前部框架11的右侧板上部,右侧主动轮模块13的减速器135安装于右侧主动轮模块13的驱动电机134的输出端,右侧主动轮模块13的主动带轮136安装于右侧主动轮模块13的减速器135的输出端,右侧主动轮模块13的主动带轮136和右侧主动轮模块13的被动带轮133通过同步带连接;左侧被动轮模块15的被动轮151安装于后部框架14左侧下部,左侧被动轮模块15的被动轮151采用双挡边设计,与左侧主动轮模块12的主动轮122结构相同,中间凹槽可与菇床横梁形成仿形嵌套滚动副,左侧被动轮模块15的刹车块152安装于后部框架14左侧;右侧被动轮模块16的被动轮161安装于后部框架14右侧下部,右侧被动轮模块16的被动轮161采用单挡边设计,与右侧主动轮模块13的主动轮132结构相同,右侧被动轮模块16的刹车块162安装于后部框架14右侧;
52.x轴直线模块18的左侧滚动轮181安装于x轴直线模块18的左侧竖梁182的下部,x轴直线模块18的左侧滚动轮181在中间连接框架17的左侧下部连杆171上滚动,组成滚轮导轨运动副。x轴直线模块18的支撑梁183与x轴直线模块18的左侧竖梁182固连,x轴直线模块18的减速器184安装于x轴直线模块18的支撑梁183左端部,x轴直线模块18的驱动电机185同轴安装于x轴直线模块18的减速器184的输入端,x轴直线模块18的传动齿轮186同轴安装于x轴直线模块18的减速器184的输出轴上,x轴直线模块18的齿条187安装于中间连接框架17的左侧上部连杆172底部,x轴直线模块18的传动齿轮186与x轴直线模块18的齿条187组成齿轮齿条传动副;x轴直线模块18的右侧滚动轮188安装于x轴直线模块18的右侧竖梁189的下部,x轴直线模块18的右侧滚动轮188在中间连接框架17的右侧下部连杆173上滚动,组成滚轮导轨运动副;x轴直线模块18的滑块1810安装于x轴直线模块18的支撑梁183右端部,x轴直线模块18的滑轨1811安装于中间连接框架17的右侧上部连杆174内侧,x轴直线模块18的滑块1810与x轴直线模块18的滑轨1811组成滑动运动副;基础y轴直线模块19的同步带滑台模组191的左端部与z轴直线模块102的滑块1021固连,z轴直线模块102的滑轨1022与x轴直线模块18的左侧竖梁182固连,z轴直线模块102的滑块1021和z轴直线模块102的滑轨1022组成滑动运动副。基础y轴直线模块19的同步带滑台模组191的右端部与z轴直线模块102的滚珠丝杆螺母1023固连,z轴直线模块102的滚珠丝杆螺杆1024安装于x轴直线模块18的右侧竖梁189中,z轴直线模块102的滚珠丝杆的驱动电机1025同轴安装于z轴直线模块102的滚珠丝杆螺杆1024的上端部。基础y轴直线模块19的驱动电机192正交方式安装于基础y轴直线模块19的同步带滑台模组191的左端部;增程y轴直线模块101的同步带滑台模组1011固连在基础y轴直线模块19的输出滑块193上,增程y轴直线模块101的驱动电机1012平行方式安装于增程y轴直线模块101的同步带滑台模组1011的左端部;第一旋转关节103的基座1031固连在增程y轴直线模块101的输出滑块1013上,第一旋转关节103的一体化电机减速器模块1032的输入端固连在第一旋转关节103的基座1031上,第二旋转关节104的直角弯外壳1041的后端部固连在第一旋转关节103的一体化电机减速器模块1032的输出端上。第二旋转关节104的一体化电机减速器模块1042的输入端固连在第二旋转关节104的直角
弯外壳1041的前端部,第三旋转关节105的直角弯外壳1051的后端部固连在第二旋转关节104的一体化电机减速器模块1042的输出端上。第三旋转关节105的一体化电机减速器模块1052的输入端固连在第三旋转关节105的直角弯外壳1051的前端部,真空吸附工具106固连在第三旋转关节105的一体化电机减速器模块1052的输出端上;
53.相机模块包括4个相机安装支架1071和4个rgb-d彩色和深度信息相机1072,相机安装支架底部固连在x轴直线模块18的支撑梁183上,rgb-d相机1072安装在相机安装支架1071前端;
54.特征码标签组108包括若干个表面带有明确特征图案的标签1081,标签1081粘贴在中间连接框架17的右侧上部连杆174外侧面;
55.根据控制系统发送的指令,左侧主动轮模块12的驱动电机124和右侧主动轮模块13的驱动电机134同时启动转动,分别通过左侧主动轮模块12的减速器125和右侧主动轮模块13的减速器135对电机力矩进行放大,带动左侧主动轮模块12的主动带轮126和右侧主动轮模块13的主动带轮136转动。然后,左侧主动轮模块12的主动带轮126和右侧主动轮模块13的主动带轮136,分别通过同步带将转动力矩传递至左侧主动轮模块12的被动带轮123和右侧主动轮模块13的被动带轮133;
56.左侧主动轮模块12的主动轮122与左侧主动轮模块12的被动带轮123同轴固连,左侧主动轮模块12的被动带轮123带动左侧主动轮模块12的主动轮122同步转动,左侧主动轮模块12的主动轮122采用双挡边设计,作为纠偏导向主动轮,与菇床横梁形成仿形嵌套滚动副;右侧主动轮模块13的主动轮132与右侧主动轮模块13的被动带轮133同轴固连,右侧主动轮模块13的被动带轮133带动右侧主动轮模块13的主动轮132同步转动,右侧主动轮模块13的主动轮132采用单挡边设计,作为浮动主动轮,与菇床横梁形成仿形嵌套滚动副;左侧被动轮模块15的被动轮151和右侧被动轮模块16的被动轮161作为辅助支撑轮,在左侧主动轮模块12的主动轮122和右侧主动轮模块13的主动轮132的带动下,在菇床横梁上滚动运动;当左侧主动轮模块12的主动轮122和右侧主动轮模块13的主动轮132带动采摘机器人10运动了控制器指定的距离后,左侧主动轮模块12的驱动电机124和右侧主动轮模块13的驱动电机134停止转动,同时,左侧被动轮模块15的刹车块152和右侧被动轮模块16的刹车块162,分别与左侧被动轮模块15的被动轮151和右侧被动轮模块16的被动轮161接触,通过摩擦力固定住左侧被动轮模块15的被动轮151和右侧被动轮模块16的被动轮,阻止采摘机器人10在菇床横梁上被动滑动;
57.根据控制系统发送的指令,x轴直线模块18的驱动电机185启动转动,通过x轴直线模块18的减速器184对电机力矩进行放大,带动x轴直线模块18的传动齿轮186转动,x轴直线模块18的传动齿轮186与x轴直线模块18的齿条187组成齿轮齿条传动副。x轴直线模块18的左侧滚动轮181作为辅助支撑轮,在中间连接框架17的左侧下部连杆171上滚动,组成滚轮导轨运动机构x轴直线模块18的右侧滚动轮188作为辅助支撑轮,在中间连接框架17的右侧下部连杆173上滚动,组成滚轮导轨运动副。在齿轮齿条传动副的传动带动下,x轴直线模块18受中间连接框架17的约束,沿着前后方向运动,当x轴直线模块18运动至控制器指定的位置后,x轴直线模块18的驱动电机185停止转动;
58.根据控制系统发送的指令,相机模块107的rgb-d相机1072启动拍摄,采集彩色图像和点云数据,基于面向农业的3d视觉感知技术,对多个相机的数据进行拼接融合处理,然
后,基于非结构环境作物信息提取技术,从无序生长的食用菌中逐次求解出食用菌的位姿。
59.控制器根据食用菌的位姿数据,采用机器人逆运动学算法求解采摘机械臂的各个关节模块位姿,从而控制x轴直线模块18的驱动电机185、z轴直线模块102的滚珠丝杆的驱动电机1025、基础y轴直线模块19的驱动电机192、第一旋转关节103的一体化电机减速器模块1032、第二旋转关节104的一体化电机减速器模块1042、第三旋转关节105的一体化电机减速器模块1052等运动至指定的位姿,然后,真空吸附工具106沿着菌盖中心法线方向吸取食用菌的菌盖,在吸取牢固后,第三旋转关节105的一体化电机减速器模块1052再次旋转,使得食用菌根部从种植层土壤中松动,然后,3个直线模块和3个旋转模块组合运动,将食用菌从种植层土壤中采摘出来;进一步地,控制器控制增程y轴直线模块101向右延伸,带动食用菌运动至采摘机器人10右侧外部,然后,控制第一旋转关节103的一体化电机减速器模块1032、第二旋转关节104的一体化电机减速器模块1042、第三旋转关节105的一体化电机减速器模块1052等运动至指定的位姿,向控制系统发送就位信号,等待转运机器人30进行对接并做深加工处理。
60.升降换层机20主体框架21、升降平台模块22、自主充电板23、快速锁紧定位装置124、快速锁紧定位装置225、定位相机26。主体框架21的后侧面、左侧面、右侧面、上表面由金属管件通过焊接进行搭建,主体框架21底部安装4个万向轮211,主体框架21的前侧面敞开,与菇床一端进行对接。快速锁紧定位装置124固连于主体框架21的左侧面前部,快速锁紧定位装置225固连于主体框架21的右侧面前部。自主充电板23固连于主体框架21的后侧面的下部。升降换层机20的控制柜27固连于主体框架21的左侧面下部,运行状态指示灯28固连于主体框架21的上表面。升降平台模块22的承载台221安装于主体框架21内部,升降平台模块22的滑块1222和滑块2223固连于升降平台模块22的承载台221左侧面,升降平台模块22的左侧导轨224固连于主体框架21的左侧面,升降平台模块22的滑块1222和滑块2223与升降平台模块22的左侧导轨224组成滑动运动副。升降平台模块22的滑块3225和滑块4226固连于升降平台模块22的承载台221右侧面,升降平台模块22的右侧导轨227固连于主体框架21的右侧面,升降平台模块22的滑块3225和滑块4226与升降平台模块22的右侧导轨227组成滑动运动副。升降平台模块22的减速器228固连于升降平台模块22的承载台221的左侧面,升降平台模块22的驱动电机2213固连于升降平台模块22的减速器228的输入端,升降平台模块22的齿轮229固连于升降平台模块22的减速器228的输出端,升降平台模块22的齿条2210安装于主体框架21的左侧面,升降平台模块22的齿轮229和升降平台模块22的齿条2210组成齿轮齿条传动副。升降平台模块22的左侧导向轨道2211固连于升降平台模块22的承载台221的上表面左侧,升降平台模块22的右侧导向轨道2212固连于升降平台模块22的承载台221的上表面右侧。定位相机26安装于升降平台模块22的承载台221的前表面右侧;
61.首先,操作人员将升降换层机20推动至菇床的一端,然后,通过操作快速锁紧定位装置124和快速锁紧定位装置225,将升降换层机20与菇床锁定在一起,此时采摘机器人10位于升降平台模块22的左侧导向轨道2211和右侧导向轨道2212上。然后,根据控制系统发送的指令,升降平台模块22升降平台模块22的驱动电机2213启动运行,通过升降平台模块22的减速器228对电机力矩进行放大,带动升降平台模块22的齿轮229转动,升降平台模块22的齿轮229和升降平台模块22的齿条2210组成齿轮齿条传动副,升降平台模块22的滑块
1222和滑块2223与升降平台模块22的左侧导轨224作为支撑滑动副,升降平台模块22的滑块3225和滑块4226与升降平台模块22的右侧导轨227作为支撑滑动副;在齿轮齿条传动副的传动带动下,升降平台模块22沿着主体框架21上下运动,当升降平台模块22运动至控制器指定的菇床种植层,控制器触发定位相机26对菇床横梁端部进行拍照,然后对采集的图像进行处理分析,判断升降平台模块22是否精确到位,若定位误差大于容许值,控制器发送指令,控制升降平台模块22沿着主体框架21上下微调,直至满足误差要求。进一步地,控制器向采摘机器人10发送指令,其沿着升降平台模块22的左侧导向轨道2211和右侧导向轨道2212运动至菇床的横梁上,执行采摘任务。进一步地,当采摘机器人10完成当前种植层的采摘任务,采摘机器人10沿着菇床的横梁、升降平台模块22的左侧导向轨道2211和右侧导向轨道2212,运动返回至升降平台模块22上。进一步地,当采摘机器人10的供电电池电量低于预警值,升降平台模块22将载着采摘机器人10运动至自动充电层,自主充电板23与采摘机器人10的自主充电铜板1010接触,启动充电。
62.转运机器人30包括自主导航移动机器人31、食用菌剪根工具32、下层框架33、上层框架34、升降机模块35、伸缩气缸136、伸缩气缸237、食用菌剪根机x轴模块38、食用菌剪根机y轴模块39、特征码标签识别相机310。下层框架33由金属管件通过焊接进行搭建,下层框架33底部固连在自主导航移动机器人31的上部,升降机模块35的控制柜351安装在下层框架33的左侧内部,下层框架33的左侧上部放置一个食用菌收集筐311和一个根茎回收筐312,上层框架34底部固连在下层框架33的右侧上部。升降机模块35的装载台352安装于上层框架34内部,升降机模块35的滑块1353和滑块2354固连于升降机模块35的装载台352左侧面,升降机模块35的左侧导轨355固连于上层框架34的左侧面,升降机模块35的滑块1353和滑块2354与升降机模块35的左侧导轨355组成滑动运动副。升降机模块35的滑块3356和滑块4357固连于升降机模块35的装载台352右侧面,升降机模块35的右侧导轨358固连于主体框架21的右侧面,升降机模块35的滑块3356和滑块4357与升降机模块35的右侧导轨358组成滑动运动副。升降机模块35的减速器359固连于升降机模块35的装载台352的右侧上部,升降机模块35的驱动电机3510固连于升降机模块35的减速器359的输入端,升降机模块35的齿轮3511固连于升降机模块35的减速器359的输出端,升降机模块35的齿条3512安装于主体框架21的右侧面,升降机模块35的齿轮3511和升降机模块35的齿条3512组成齿轮齿条传动副。伸缩气缸136的固定端安装在升降机模块35的装载台352下部,伸缩气缸136的伸缩端安装在食用菌收集盒313的底部,食用菌收集盒313的左端部预留锥形开口,食用菌收集盒313的左侧下部与升降机模块35的装载台352的内部下表面采用铰链连接。伸缩气缸237的固定端安装在升降机模块35的装载台352下部,伸缩气缸237的伸缩端安装在根茎回收盒314的底部,根茎回收盒314的左端部预留锥形开口,根茎回收盒314的左侧下部与升降机模块35的装载台352的内部下表面采用铰链连接。食用菌剪根机x轴模块38的直线驱动模组381安装于升降机模块35的装载台352的右侧面,食用菌剪根机x轴模块38的滑轨382安装于升降机模块35的装载台352的左侧面。食用菌剪根机y轴模块39的右端部安装于食用菌剪根机x轴模块38的直线驱动模组381的输出端,食用菌剪根机y轴模块39的左端部安装于食用菌剪根机x轴模块38的滑块383上,食用菌剪根机x轴模块38的滑块383和食用菌剪根机x轴模块38的滑轨382组成滑动副。食用菌剪根工具32安装于食用菌剪根机y轴模块39的输出端,食用菌剪根工具32包括上部夹具321和下部剪刀322,食用菌剪根工具32的上部夹具321
安装在食用菌剪根工具32连接板上,位于下部剪刀322的上部,食用菌剪根工具32的下部剪刀322安装在食用菌剪根工具32连接板上,位于上部夹具321的下部。特征码标签识别相机310安装在升降机模块35的前侧面。
63.首先,根据控制系统发送的指令,自主导航移动机器人31运动至菇床侧面的指定位置。然后,升降机模块35的驱动电机3510启动运行,通过升降机模块35的减速器359对电机力矩进行放大,带动升降机模块35的齿轮3511转动,升降机模块35的齿轮3511和升降机模块35的齿条3512组成齿轮齿条传动副。升降机模块35的滑块1353和滑块2354与升降机模块35的左侧导轨355作为支撑滑动副。升降机模块35的滑块3356和滑块4357与升降机模块35的右侧导轨358作为支撑滑动副。在齿轮齿条传动副的传动带动下,升降机模块35沿着上层框架34上下运动。当升降机模块35运动至控制器指定的菇床种植层,控制器触发特征码标签识别相机310对特征码标签组108进行拍照,然后对采集的图像进行处理分析,判断采摘机器人10与转运机器人30的相对位置,然后,自主导航移动机器人31根据识别的结果进行二次定位,转运机器人30调整运动至合理的相对位置。当接收到采摘机器人10完成一个食用菌的采摘并就位的信号后,控制器发送控制指令,控制食用菌剪根机x轴模块38和食用菌剪根机y轴模块39运动至指定的位置,然后,食用菌剪根工具32的上部夹具321与真空吸附工具106对接,夹取食用菌的根部,接着,控制食用菌剪根机x轴模块38和食用菌剪根机y轴模块39组合运动,带动被夹取的食用菌运动至根茎回收盒314上方,然后,食用菌剪根工具32的下部剪刀322剪除当前夹持的食用菌根部。接着,控制食用菌剪根机x轴模块38和食用菌剪根机y轴模块39组合运动,带动被夹取的且被剪除根部的食用菌运动至食用菌收集盒313上方,然后,食用菌剪根工具32的上部夹具321张开,食用菌落入食用菌收集盒313。进一步地,当食用菌收集盒313满载,伸缩气缸136伸展,通过支撑使食用菌收集盒313向左侧方倾斜,食用菌从左端部预留锥形开口处落入食用菌收集筐311中。当根茎回收盒314满载,伸缩气缸237伸展,通过支撑使根茎回收盒314向左侧方倾斜,食用菌的根部从左端部预留锥形开口处落入根茎回收筐312中。当食用菌收集筐311或根茎回收筐312满载,转运机器人30自主导航运动至对接流水线,自动将满载食用菌收集筐311或根茎回收筐312输送至外部流水线上。然后,返回菇床侧面继续执行剪根、分类作业。
64.本实用新型的具体工作流程如下:
65.1、操作人员将升降换层机20推动至菇床的一端,将升降换层机20与菇床锁定在一起,此时采摘机器人10位于升降平台模块22上。然后,根据控制系统发送的指令,升降平台模块22沿着主体框架21上下运动,当升降平台模块22运动至控制器指定的菇床种植层,控制器触发定位相机26对菇床横梁端部进行拍照,然后对采集的图像进行处理分析,判断升降平台模块22是否精确到位,若定位误差大于容许值,控制器发送指令,控制升降平台模块22沿着主体框架21上下微调,直至满足误差要求。
66.2、控制器向采摘机器人10发送指令,其沿着升降平台模块22的左侧导向轨道2211和右侧导向轨道2212运动至菇床的横梁上,执行采摘任务。
67.3、采摘机器人10在菇床横梁上滚动运动,根据控制器的指令,以菇床横梁为导轨向菇床另一端移动一段固定距离后停下。同步地,根据控制系统发送的指令,自主导航移动机器人31运动至菇床侧面的指定位置,升降机模块35运动至控制器指定的菇床种植层,利用视觉引导转运机器人30调整运动至合理的相对位置。然后,相机模块107的rgb-d相机
1072启动拍摄,采集彩色图像和点云数据,基于面向农业的3d视觉感知技术,对多个相机的数据进行拼接融合处理,然后,基于非结构环境作物信息提取技术,从无序生长的食用菌中逐次求解出食用菌的位姿。
68.4、控制器根据食用菌的位姿数据,采用机器人逆运动学算法求解采摘机械臂的各个关节模块位姿,从而控制3个直线模块和3个旋转模块组合运动至指定的位姿,然后,真空吸附工具106沿着菌盖中心法线方向吸取食用菌的菌盖,在吸取牢固后,第三旋转关节105的一体化电机减速器模块1052再次旋转,使得食用菌根部从种植层土壤中松动,然后,将食用菌从种植层土壤中采摘出来。
69.5、控制器控制增程y轴直线模块101向右延伸,带动食用菌运动至采摘机器人10右侧外部,然后,控制3个旋转模块运动至指定的位姿,向控制系统发送就位信号,等待转运机器人30进行对接并做深加工处理。
70.6、当接收到采摘机器人10完成一个食用菌的采摘并就位的信号后,控制器发送控制指令,控制食用菌剪根机x轴模块38和食用菌剪根机y轴模块39运动至指定的位置,然后,食用菌剪根工具32完成一个食用菌的剪根和分类作业。
71.7、当食用菌收集筐311或根茎回收筐312满载,转运机器人30自主导航运动至对接流水线,自动将满载食用菌收集筐311或根茎回收筐312输送至外部流水线上。然后,返回菇床侧面继续执行剪根、分类作业。
72.8、采摘机器人10完成当前区域的采摘作业后,在菇床横梁上继续滚动运动,向菇床另一端移动一段固定距离后停下,同步地,转运机器人30运动至合理的相对位置,与采摘机器人10协作,完成食用菌的继续进行食用菌的剪根、分类、转运对接作业。
73.9、当采摘机器人10完成当前层级的采摘后,向升降平台模块22移动,并将其升降至下一个待采摘层进行新一轮的采摘作业。
74.文中rgb-d相机为彩色和深度信息相机。
75.本实用新型相对于现有技术具有如下优点:
76.1完整食用菌的采、收、运作业设备,涵盖了食用菌的自动化采摘、自动化二次处理、自动化分类、自动化转运等全流程的现场作业工序。
77.2本实用新型采用的采摘机器人,配置的3d相机系统,能够识别无序分布、姿态各异的多种类型食用菌,引导7自由度采摘机械臂和柔性吸盘执行采摘作业,实现柔性化、无损化采摘指定规格尺寸的食用菌。
78.3本实用新型采用的升降换层机,能够被快速移动部署于不同的菇床,提高换产效率。通过齿轮齿条运行机构和定位相机配合,实现对升降平台模块高精度自主定位,能够解决菇床层高间距不一致导致的采摘机器人与菇床对接的问题,确保采摘机器人平稳地从升降换层机运动至菇床的作业层。
79.4本实用新型采用的转运机器人,通过特征码标签识别相机的引导,实现与采摘机器人高精度对接,并对食用菌进行二次深加工。能够自主地在狭窄的食用菌种植房内运动,与外部流水线进行对接,对已经满筐的食用菌收集筐和根茎回收筐的转运和换筐,实现无人值守式转运作业。
80.对于本领域技术人员而言,显然本实用新型不限于上述示范性实施例的细节,而且在不背离本实用新型的精神或基本特征的情况下,能够以其他的具体形式实现本实用新
型。因此,无论从哪一点来看,均应将实施例看作是示范性的,而且是非限制性的,本实用新型的范围由所附权利要求而不是上述说明限定,因此旨在将落在权利要求的等同要件的含义和范围内的所有变化囊括在本实用新型内。不应将权利要求中的任何附图标记视为限制所涉及的权利要求。
81.此外,应当理解,虽然本说明书按照实施方式加以描述,但并非每个实施方式仅包含一个独立的技术方案,说明书的这种叙述方式仅仅是为清楚起见,本领域技术人员应当将说明书作为一个整体,各实施例中的技术方案也可以经适当组合,形成本领域技术人员可以理解的其他实施方式。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1