一种电动旋耕机及电动拖拉机的制作方法
1.本实用新型涉及拖拉机技术领域,尤其是提供一种电动旋耕机及电动拖拉机。
背景技术:
2.从新能源的发展方向和新技术的应用领域来看,电动力农机装备成为农业机械化进一步发展的重要途径,高效智能环保农业动力机械已成为全球农机科技创新的主攻方向,电动拖拉机大多通过外接作业机械进行作业,一般是通过外接电路控制作业机械工作。
3.因此,带有电机的电动旋耕机应运而生,但电动旋耕机往往有着在工作时电机温度过高,农田环境扬尘大,泥沙堵塞电机的问题。鉴于此,提出一种电动旋耕机,能够确保电机温度稳定,并且不会因扬尘大影响电机工作。
技术实现要素:
4.本实用新型的目的是提供一种电动旋耕机及电动拖拉机,以满足在电动旋耕机工作时,电机温度稳定,不会因扬尘大影响工作。
5.一种电动旋耕机,包括:机架、第三电机,变速组件、旋耕组件以及冷却组件,所述第三电机设置于机架上,用于提供动力;所述变速组件设置于机架侧部并与所述第三电机传动连接,用于对第三电机输出的动力进行变速;所述旋耕组件设置于机架底部进行旋耕作业,旋耕组件与所述变速组件传动连接,变速组件输出的动力传递至所述旋耕组件用以驱动所述旋耕组件作业;所述冷却组件设置于第三电机侧部,并与所述第三电机传动连接,用于实现对所述第三电机的降温及除尘。
6.进一步地,所述第三电机包括设置于机架上的第三电机壳以及转动设置于第三电机壳上的输出轴,所述冷却组件包括设套设于输出轴上以及罩设于风扇上的罩壳,所述风扇随输出轴同步转动,用于实现对所述第三电机的降温及除尘。
7.进一步地,所述风扇的转动外径为d1,所述第三电机壳的外径为d2,所述d1》d2。
8.进一步地,所述第三电机还包括设置于输出轴上的主动轮,所述变速组件包括与所述主动轮啮合的第一从动轮、与第一从动轮同轴固定设置的第二从动轮以及与所述第二从动轮啮合的传动链,所述旋耕组件包括转动设置于机架底部的刀辊、交错间隔设置于刀辊上的旋耕刀以及与刀辊同轴固定设置的第三从动轮,所述第三从动轮通过所述传动链与所述第二从动轮传动连接,动力由主动轮依次传递到第一从动轮、第二从动轮、传动链、第三从动轮,最终输入至刀辊。
9.进一步地,所述主动轮的外径为d1,所述第一从动轮的外径为d2,所述第二从动轮的外径为d3,所述第三从动轮的外径为d4,所述d1:d2=3.5~5,所述d3: d4=1.5~2.5。
10.进一步地,所述变速组件还包括变速组件壳体、与传动链贴合的张紧件以及两个分别设置于张紧件两端的第一调节件,所述主动轮、第一从动轮、第二从动轮、传动链、第三从动轮、张紧件以及第一调节件均设置于变速组件壳体内,所述第一调节件包括转动设置于变速组件壳体上的转动部以及与转动部偏心设置的连接部,所述连接部与张紧件固定连
接。
11.进一步地,所述电动旋耕机还包括设置于机架后端的挡板组件,所述挡板组件包括转动设置于机架后端的挡板以及调节挡板和地面之间距离的第二调节件。
12.进一步地,所述第二调节件包括调节杆、弹簧以及螺栓,所述螺栓转动设置于机架上,所述调节杆一端与螺栓螺纹连接,另一端与所述挡板转动设置,所述弹簧套设与调节杆上并设置于螺栓与挡板之间。本方案还提供一种电动拖拉机,其包括上述的电动旋耕机。
13.本方案中所提供的电动旋耕机,通过设置冷却组件,在为第三电机吹风降温的同时,能将扬尘吹走,不影响第三电机工作。
附图说明
14.下面结合附图和具体实施方式对本实用新型作进一步详细说明:
15.图1为本实用新型电动拖拉机的结构原理图。
16.图2为本实用新型电动拖拉机的结构示意图。
17.图3为图2的a处局部放大图。
18.图4为本实用新型电动拖拉机的内部结构示意图。
19.图5为图4的b处局部放大图。
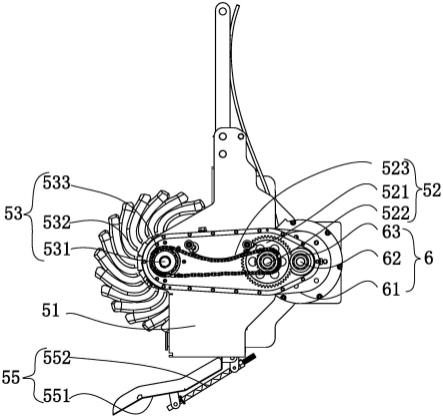
20.图6为本实用新型电动旋耕机的结构示意图。
21.图7为本实用新型电动旋耕机的另一视角结构示意图。
22.图8为本实用新型电动旋耕机去除电机壳的结构示意图。
23.图9为图8的c处局部放大图。
24.图10为图8的d处局部放大图。
25.附图标记:1-蓄电池组、2-第一电机、3-发电机组、31-发动机、32-第二电机、4-车架、5-电动旋耕机、51-机架、52-变速组件、521-第一从动轮、522-第二从动轮、523-传动链、524-张紧件、525-第一调节件、5251-转动部、5252-连接部、 526-变速组件壳体、53-旋耕组件、531-刀辊、532-旋耕刀、533-第三从动轮、54
‑ꢀ
冷却组件、541-风扇、542-罩壳、55-挡板组件、551-挡板、552-第二调节件、5521
‑ꢀ
调节杆、5522-弹簧、5523-螺栓、6-第三电机、61-电机壳、62-输出轴、63-主动轮、 7-提升器、8-提升控制器、9-电池管理系统、10-第一电机控制器、11第三电机控制器-、12-整车控制器、13-整流器、131-交流电连接口、14-转速控制器、15
‑ꢀ
变速箱、16-差速行驶系统、161-差速器、162-驱动轮、163-转向轮、17-国标直流充电口。
具体实施方式
26.为了更清楚地说明本实用新型实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本实用新型的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
27.为使图面简洁,各图中只示意性地表示出了与本实用新型相关的部分,它们并不代表其作为产品的实际结构。另外,以使图面简洁便于理解,在有些图中具有相同结构或功能的部件,仅示意性地绘示了其中的一个,或仅标出了其中的一个。在本文中,“一个”不仅
表示“仅此一个”,也可以表示“多于一个”的情形。
28.还应当进一步理解,在本技术说明书和所附权利要求书中使用的术语“和/或”是指相关联列出的项中的一个或多个的任何组合以及所有可能组合,并且包括这些组合。
29.在本文中,需要说明的是,除非另有明确的规定和限定,术语“安装”、“相连”、“连接”应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或一体地连接;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通。对于本领域的普通技术人员而言,可以具体情况理解上述术语在本实用新型中的具体含义。
30.另外,在本技术的描述中,术语“第一”、“第二”等仅用于区分描述,而不能理解为指示或暗示相对重要性。
31.为了更清楚地说明本实用新型实施例或现有技术中的技术方案,下面将对照附图说明本实用新型的具体实施方式。显而易见地,下面描述中的附图仅仅是本实用新型的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图,并获得其他的实施方式。
32.以下结合说明书的附图,对本实用新型的实施例予以进一步地详尽阐述。
33.一种电动拖拉机,包括蓄电池组1、第一电机2、发电机组3、车架4、电动旋耕机5、提升器7、提升控制器8、电池管理系统9、第一电机控制器10、第三电机控制器11、整车控制器12、整流器13、转速控制器14、变速箱15 以及差速行驶系统16,所述电动旋耕机5上设有控制电动旋耕机5工作的第三电机6。
34.所述车架4用于承载上述部件,所述蓄电池组1用于提供电力,所述第一电机2用于电能转换为机械能输出,所述第一电机2的转速通过变速箱15调整转速后输出至所述差速行驶系统16,进而通过差速行驶系统16驱动电动拖拉机行走;在本实施例中,所述差速行驶系统16包括差速器161、驱动轴、驱动轮162以及转向轮163,所述差速器161与所述变速箱15连接,所述差速器 161与所述驱动轴连接并将动力传输至驱动轴,所述驱动轮162分别通过所述驱动轴安装在车架4后方的左右两侧,所述转向轮163分别安装在车架4前方的左右两侧;通过第一电机2驱动电动拖拉机行走,可有效实现无级变速调节,有效提高行走稳定性。
35.所述发电机组3用于将机械能转换为电能,所述发电机组3包括发动机31 和第二电机32,所述第二电机32将发动机31产生的机械能转换为电能输出用于提供电力;所述整流器13用于将第二电机32产生的交流电转换为直流电输送至电池管理系统9;所述整流器13上还包括交流电连接口131用于连接工频交流电为蓄电池组1充电。所述电动拖拉机还包括:国标直流充电口17,所述国标直流充电口17与所述电池管理系统9电连接,用于接收直流电;所述发电机组3还包括用于向外输出电流的外接端口,所述外接端口包括220v交流电端口和380v交流电端口,方便直接对外输出交流电以满足其他用电需求;通过使用蓄电池组1为电动拖拉机输送电力,实现零排放,降低机组噪音。
36.所述电动旋耕机5连接于所述车架4后方用于作业;所述第三电机6独立设置于电动旋耕机5内,用于将蓄电池组1提供的电能或第二电机32提供的电能转换为机械能输出,进而为电动旋耕机5提供动力;所述提升器7一端与所述车架4连接,另一端与所述电动旋耕机5连接,所述提升控制器8用于控制所述提升器7提升或下压,进而控制所述电动旋耕机5的升高或下降;所述转速控制器14用于控制第三电机6转速进而控制电动旋耕机5作业速
度。在本实施例中,所述电动旋耕机5包括机架51、变速组件52、旋耕组件53、冷却组件54以及挡板组件55,所述第三电机6设置于机架51上,用于提供动力,所述变速组件52设置于机架51侧部并与所述第三电机6传动连接,所述旋耕组件53设置于机架51底部,并与所述变速组件52传动连接,所述变速组件 52输出的动力传递至所述旋耕组件53用以驱动所述旋耕组件53作业;所述冷却组件54设置于第三电机6侧部,并与所述第三电机6传动连接,用于实现对所述第三电机6的降温及除尘,通过设置冷却组件54,在为第三电机6吹风降温的同时,能将扬尘吹走,不影响第三电机6工作。通过使用第三电机6控制农业机械运作,有效与控制电动拖拉机的第一电机2解耦,实现行驶和作业的独立控制,保证了各类作业环境的需求。
37.在本实施例中,所述第三电机6包括设置于机架51上的第三电机壳61以及转动设置于第三电机壳61上的输出轴62,所述冷却组件54包括设置于输出轴62上的风扇541以及罩设于风扇541上的罩壳542,所述风扇541随输出轴62同步转动,用于实现对第三电机壳61的降温及除尘,进一步地,当所述风扇541转动时形成的气流流道的外径为转动外径,所述风扇541的转动外径为 d1,所述第三电机壳61外径为d2,所述d1》d2,以确保能有效对第三电机6 整体吹风,冷却的同时,吹扫扬尘,确保第三电机6稳定工作。
38.所述第三电机6还包括设置于输出轴62上的主动轮63,所述变速组件52 包括与所述主动轮63啮合的第一从动轮521、与第一从动轮521同轴固定设置的第二从动轮522以及与所述第二从动轮522啮合的传动链523,所述旋耕组件53包括转动设置于机架51底部的刀辊531、交错间隔设置于刀辊531上的旋耕刀532以及与刀辊531同轴固定设置的第三从动轮533,所述第三从动轮 533通过所述传动链523与所述第二从动轮522传动连接,动力由主动轮63依次传递到第一从动轮521、第二从动轮522、传动链523、第三从动轮533,最终输入至刀辊531。
39.所述主动轮63的外径为d1,所述第一从动轮521的外径为d2,所述第二从动轮522的外径为d3,所述第三从动轮533的外径为d4,所述d1:d2=3.5~5,所述d3:d4=1.5~2.5。
40.进一步地,所述变速组件52还包括变速组件壳体526、与传动链523贴合的张紧件524以及两个分别设置于张紧件524两端的第一调节件525,所述主动轮63、第一从动轮521、第二从动轮522、传动链523、第三从动轮533、张紧件524以及第一调节件525均设置于变速组件壳体526内,所述第一调节件 525包括转动设置于变速组件壳体526上的转动部5251以及与转动部5251偏心设置的连接部5252,所述连接部5252与张紧件524固定连接。
41.在本实施例中,所述电动旋耕机5还包括设置于机架51后端的挡板组件 55,所述挡板组件55包括转动设置于机架51后端的挡板551以及调节挡板551 和地面之间距离的第二调节件552。
42.进一步地,所述第二调节件552包括调节杆5521、弹簧5522以及螺栓5523,所述螺栓5523转动设置于机架51上,所述调节杆5521一端与螺栓5523螺纹连接,另一端与所述挡板551转动设置,所述弹簧5522套设与调节杆5521上并设置于螺栓5523与挡板551之间。
43.所述电池管理系统9与所述蓄电池组1电连接用于调控蓄电池组1的充放,并且所述电池管理系统9与所述第二电机32电连接用于调控第二电机32输出电流流向;所述第一电机控制器10用于控制第一电机2的转速、转动方向以及启停;所述第三电机控制器11用于控制第三电机6的转速和启停;所述整车控制器12与所述第一电机控制器10电连接,通过整车控制器12向第一电机控制器10发送控制信号,进而控制第一电机2转速、转动方向和启
停;所述整车控制器12与所述第三电机控制器11电连接,通过整车控制器12向第三电机控制器11发送控制信号,进而控制第三电机6启停;所述整车控制器 12与所述电池管理系统9电连接用于发送控制信号,通过整车控制器12向电池管理系统9发送控制信号,进而调节电池管理系统9向第一电机2或第三电机6的输出功率;通过设置整车控制器12对整车进行集中控制,统一调控电动拖拉机行走、电动旋耕机5工作等,有效提升综合利用效率,节约能源。
44.上述电动拖拉机运行时,当蓄电池组1电力足以维持整机工作时,发动机 31关闭,蓄电池组1为整机供电;当蓄电池组1电力不足以维持整机工作时,蓄电池组1不供电,发电机组3为整机提供电力,同时为了确保为蓄电池组1 充电,电池管理系统9会降低对第一电机2和第三电机6的功率输出,即降低工作强度,进而确保边工作边为蓄电池组1充电;当需要进行长时间高负荷工作,工作需求功率大于发电机组3功率时,为确保工作效率和续航时间,发电机组3直接为整机供电同时蓄电池组1补充供电以确保满足工作需求功率。
45.本实施例中,所述控制信号包括:手动控制信号、作业模式信号、联动模式信号、加速踏板信号、挡位信号、车速信号、制动信号以及手动加速信号。
46.若车辆需要前行,直接挂高/低挡位,整车控制器12输出挡位信号控制车辆前进,或者踩下加速踏板,整车控制器12输出加速踏板信号控制车辆前进,或者手动输入加速信号,整车控制器12输出手动加速信号控制车辆前进;当整车控制器12同时检测到两套加速信号,整车控制器12优先响应加速踏板信号。
47.在本实施例中,所述手动加速信号的触发需要满足以下触发机制:
48.a、车辆进入待启动状态,
49.b、整车控制器12检测到挡位信号,
50.c、加速踏板始终处于初始位置,即整车控制器12检测不到加速踏板信号,
51.d、短期内整车控制器12检测到手动加速信号,在本实施例中,短期为小于30s,手动加速信号输入方式为通过手动控制模式开关输入,一般为自复位触点式开关。
52.车辆运行过程中,若整车控制器12未检测到制动信号或加速踏板信号或手动加速信号未拨动至零位,车辆始终响应手动加速信号,若整车控制器12 只要检测到三者中一路信号输入,则立刻调整为响应加速踏板信号模式,若想使用手动控制,则需要按照上述手动加速信号的触发机制启动手动控制模式。
53.需要注意的是,无论车辆在什么工作状态下,当整车控制器12输出制动信号时,第一电机控制器10控制第一电机2停止转动进而起到车辆制动的目的,并且当制动信号持续存在时,第一电机控制器10不响应任何加速信号,直到当制动信号取消后,第一电机控制器10切换到响应加速踏板信号的状态,确保车辆安全稳定。
54.车辆工作包括以下两种工作模式:
55.一、独立控制模式,手动启动作业模式开关输出作业模式信号,整车控制器12向第三电机控制器11输出控制信号进而控制第三电机6恒转速转动,通过控制转速控制器14调整第三电机6转速,本实施例作业模式开关为触点式;本实施例的电动拖拉机还包括用于控制所述提升器7提升或下降的提升控制器 8,在本实施例中所述提升控制器8为电动推杆式控制器,通过上下调节电动推杆,进而自由控制旋耕作业深度。
56.二、联动控制模式,即提升器7与第三电机控制器11联动控制,首先通过转速控制
器14设置第三电机6转速,而后启动联动模式开关,整车控制器 12输出联动模式信号,此时第三电机6处于待启动状态,通过提升控制器8控制提升器7下降或提升,当提升器7下降到预设位置时,第三电机6开始转动,进入工作状态;当提升器7上升到预设位置时,第三电机6停止转动,进入待机状态。通过将手动控制模式开关、作业模式开关以及联动模式开关设置为触点式自复位开关,能有效提高作业的方便性以及操作安全,减少了人员误操作产生的安全隐患。
57.在本实施例中提及的“空套”是指齿轮套设于轴上以实现在轴上的相对转动,所述空套可以是在齿轮和轴之间增设轴承、轴套或者其它部件,也可以是齿轮直接设于轴上。轴承、轴套均是本领域技术人员已知的装置,因此不再进一步描述,在说明书中既没有被描述也没有被示出。
58.本领域技术人员可显见,可对本实用新型的上述示例性实施例进行各种修改和变型而不偏离本实用新型的精神和范围。因此,旨在使本实用新型覆盖落在所附权利要求书及其等效技术方案范围内的对本实用新型的修改和变型。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1