一种残留地膜智能抽取装置
1.本实用新型涉及地膜回收技术领域,尤其是涉及一种残留地膜智能抽取装置。
背景技术:
2.目前,田间农用地膜的回收方法主要为机械化回收残膜和人工回收残膜。对于人工回收残膜,其缺点是工作效率比较低,而且用工成本也比较大。所以利用人工回收残膜的方法,在解决农田残膜污染上其效果不是十分显著。为了提高农残膜田回收的工作效率以及减少作业成本,机械化回收残膜无疑是目前一种最佳的方法。目前市面上主要有的地膜回收机:1cm系列残膜回收机、hswf-350型薯类残膜回收机,这些地膜回收机,都是针对平原地区,地形比较广阔的残膜地区,但是针对山地、丘陵、盆地等小型地区的收膜方面还是空白。现有残膜回收机普遍存在的膜杂难分离、脱膜不理想、回收率低、田间工作环境适应性差以及工作部件不可靠等问题。同时,小型田地不适合大型地膜回收机的工作,且市场尚未有小型自动地膜回收机的设备,导致人工成本较大。
技术实现要素:
3.本实用新型的目的就是为了克服上述现有技术存在针对山地、丘陵、盆地等小型地区的机械化收膜方面还是空白的缺陷而提供一种残留地膜智能抽取装置。
4.本实用新型的目的可以通过以下技术方案来实现:
5.一种残留地膜智能抽取装置,包括翻土装置、收集装置、勾膜拾取一体化装置和支撑整个残留地膜智能抽取装置的机架,所述勾膜拾取一体化装置包括传送带装置、弹齿和脱模板,所述弹齿的数量为多个,多个弹齿均连接在所述传送带装置上,朝向传送带装置外侧,并随传送带装置转动,所述弹齿通过弹性件可转动连接所述传送带装置,所述脱模板位于所述弹齿的移动路径上,并位于所述收集装置的上方。
6.进一步地,所述弹性件为扭转弹簧,该扭转弹簧的一端连接传送带装置,另一端连接弹齿。
7.进一步地,所述弹齿交错排列在传送带装置上。
8.进一步地,所述传送带装置倾斜布置在机架上,所述传送带装置的一端位于收集装置的上方,另一端位于残留地膜智能抽取装置的底部。
9.进一步地,所述收集装置包括收集箱和收集箱翻转机构,所述收集箱安装在收集箱翻转机构上。
10.进一步地,所述收集箱翻转机构包括重力感应器和电动推杆,所述重力感应器安装在收集箱底部,所述电动推杆的驱动端连接收集箱。
11.进一步地,所述翻土装置位于所述残留地膜智能抽取装置的一端,所述翻土装置包括外壳、翻土刀架、翻土刀片、双轴电机和伸缩杆,所述外壳固定在机架上,所述伸缩杆的固定端连接机架,伸缩端连接翻土刀架,所述伸缩杆位于翻土刀架的上方,用于带动翻土刀架上下移动;所述翻土刀片固定在翻土刀架上,所述双轴电机的固定端连接机架,驱动端连
接翻土刀架;所述外壳内安装自动导航装置。
12.进一步地,所述残留地膜智能抽取装置的底部连接有多个驱动轮机构,所述驱动轮机构包括麦克纳姆轮、驱动电机和连接装置,所述驱动电机驱动连接麦克纳姆轮,所述麦克纳姆轮和驱动电机均通过连接装置安装在机架上。
13.进一步地,所述残留地膜智能抽取装置靠近翻土装置的一端设有挡板,该挡板为弧形挡板,所述挡板朝向残留地膜智能抽取装置的外侧伸出。
14.进一步地,所述残留地膜智能抽取装置远离翻土装置的一端设有限深装置,该限深装置包括限深轮和调节拉杆,所述限深轮可转动连接在机架上,所述调节拉杆安装在机架上,并驱动连接限深轮。
15.与现有技术相比,本实用新型具有以下优点:
16.(1)本实用新型摒弃了原始的勾膜结构,创新了传送带和弹齿的结合,且弹齿通过弹性件可弹性转动连接在传送带装置上,通过传送带改变弹齿的角度和力度,有效的实现了捡膜角与脱膜角的可控;整体上能使得残膜抽取效率升高,避免残膜造成二次污染。
17.(2)本实用新型机型设计针对性强、操作方便,弥补了市面上大型机器在小范围工作时的不足,解决了因地膜残留面积小、分布较散而无法被抽取的问题,从源头有效的提高了地膜抽取率,残膜回收率可稳定在90%以上。
18.(3)本实用新型在收集箱底部设置了重力感应器,通过重力感应当收集箱增加达到一定重量后,小车停止作业,将已收入的残膜运送到指定的回收地点,并通过电动推杆翻转收集箱倒出收集的残膜,然后返回继续工作。这样有效的减少人力的投入,并且还防止了因为残膜回收过多而溢出导致的二次污染。
附图说明
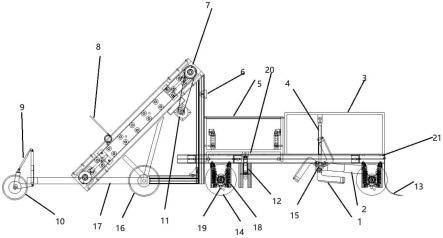
19.图1为本实用新型实施例中提供的一种残留地膜智能抽取装置的整体结构示意图;
20.图2为本实用新型实施例中提供的一种残留地膜智能抽取装置的立体示意图;
21.图3为本实用新型实施例中提供的一种残留地膜智能抽取装置的勾膜拾取一体化装置的结构示意图;
22.图4为本实用新型实施例中提供的一种残留地膜智能抽取装置的勾膜拾取一体化装置的立体示意图;
23.图5为本实用新型实施例中提供的一种残留地膜智能抽取装置的局部示意图;
24.图中,1、翻土刀片,2、双轴电机,3、外壳,4、伸缩杆,5、收集箱,6、脱模板,7、传送带装置,8、弹齿,9、调节拉杆,10、限深轮,11、调速电机,12、电动推杆,13、挡板,14、麦克纳姆轮,15、翻土刀架,16、轮子,17、机架,18、连接装置,19、驱动电机,20、重力感应器,21、铝板,22、张紧装置,23、地膜,24、土壤。
具体实施方式
25.为使本实用新型实施例的目的、技术方案和优点更加清楚,下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例是本实用新型一部分实施例,而不是全部的实施例。通常在此处附图中描述和
示出的本实用新型实施例的组件可以以各种不同的配置来布置和设计。
26.因此,以下对在附图中提供的本实用新型的实施例的详细描述并非旨在限制要求保护的本实用新型的范围,而是仅仅表示本实用新型的选定实施例。基于本实用新型中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
27.应注意到:相似的标号和字母在下面的附图中表示类似项,因此,一旦某一项在一个附图中被定义,则在随后的附图中不需要对其进行进一步定义和解释。
28.在本实用新型的描述中,需要说明的是,术语“中心”、“上”、“下”、“左”、“右”、“竖直”、“水平”、“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,或者是该实用新型产品使用时惯常摆放的方位或位置关系,仅是为了便于描述本实用新型和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本实用新型的限制。
29.需要说明的是,术语“第一”、“第二”仅用于描述目的,而不能理解为指示或暗示相对重要性或者隐含指明所指示的技术特征的数量。由此,限定有“第一”、“第二”的特征可以明示或者隐含地包括一个或者更多个该特征。在本技术的描述中,“多个”的含义是两个或两个以上,除非另有明确具体的限定。
30.此外,术语“水平”、“竖直”等术语并不表示要求部件绝对水平或悬垂,而是可以稍微倾斜。如“水平”仅仅是指其方向相对“竖直”而言更加水平,并不是表示该结构一定要完全水平,而是可以稍微倾斜。
31.实施例1
32.如图1-5所示,本实施例提供一种残留地膜智能抽取装置,包括翻土装置、收集装置、勾膜拾取一体化装置和支撑整个残留地膜智能抽取装置的机架17,勾膜拾取一体化装置包括传送带装置7、弹齿8和脱模板6,弹齿8的数量为多个,多个弹齿8均连接在传送带装置7上,朝向传送带装置7外侧,并随传送带装置7转动,弹齿8通过弹性件可转动连接传送带装置7,脱模板6位于弹齿8的移动路径上,并位于收集装置的上方。
33.优选的,弹性件为扭转弹簧,该扭转弹簧的一端连接传送带装置7,另一端连接弹齿8。
34.传送带装置7倾斜布置在机架17上,传送带装置7的一端位于收集装置的上方,另一端位于残留地膜智能抽取装置的底部,用于通过弹齿8勾取土壤24中的残留地膜。弹齿8交错排列在传送带装置7上。
35.可选的,残留地膜智能抽取装置的底部连接有多个驱动轮机构,驱动轮机构包括麦克纳姆轮14、驱动电机19和连接装置18,驱动电机19驱动连接麦克纳姆轮14,麦克纳姆轮14和驱动电机19均通过连接装置18安装在机架17上。
36.本实施例中,脱膜板6通过螺栓连接,固定在机架17上。弹齿8固定在传送带装置7上,传送带装置7上设有电机连接座,与调速电机11连接。同时传送带装置7上开设有螺孔,通过杆子与机架17连接;传送带装置7上的设有张紧装置22用于传送带的张紧。
37.作为一种优选的实施方式,收集装置包括收集箱5和收集箱翻转机构,收集箱5安装在收集箱翻转机构上。收集箱翻转机构包括重力感应器20和电动推杆12,重力感应器20安装在收集箱5底部,电动推杆12的驱动端连接收集箱5。
38.本实施例中,设置铝板21通过螺栓连接在机架17上,重力感应装置20设立在铝板21上;外壳3固定在铝板21上。电动推杆12一端连接在小型材上,小型材则与机架17相连,另一端与收集箱5连接。
39.通过重力感应当收集箱增加达到一定重量后,小车停止作业,将已收入的地膜23运送到指定的回收地点,并通过电动推杆12翻转收集箱5倒出收集的地膜23,然后返回继续工作。这样有效的减少人力的投入,并且还防止了因为地膜23回收过多而溢出导致的二次污染。
40.作为一种优选的实施方式,翻土装置位于残留地膜智能抽取装置的一端,翻土装置包括外壳3、翻土刀架15、翻土刀片1、双轴电机2和伸缩杆4,外壳3固定在机架17上,伸缩杆4的固定端连接机架17,伸缩端连接翻土刀架15,伸缩杆4位于翻土刀架15的上方,用于带动翻土刀架15上下移动;翻土刀片1固定在翻土刀架15上,双轴电机2的固定端连接机架17,驱动端连接翻土刀架15;外壳3内安装自动导航装置。勾取土壤中的残膜前首先对土壤进行翻土,能提高勾取效率。
41.优选的,自动导航装置为基于pixugv系统的自动导航技术,可以追踪预定位置,自动化规划最优路线,在需要抽取的区域进行自动翻土,抽膜工作。与现有地膜抽取装置相比,能有效提高抽取精准度、缩短工作周期、减少工作失误,可提升20%~30%的抽取效率。同时还在原有的基础上增加了激光雷达扫描避障系统,可以提高小车的工作效率。
42.作为一种优选的实施方式,残留地膜智能抽取装置靠近翻土装置的一端设有挡板13,该挡板13为弧形挡板13,挡板13朝向残留地膜智能抽取装置的外侧伸出。
43.作为一种优选的实施方式,残留地膜智能抽取装置远离翻土装置的一端设有限深装置,该限深装置包括限深轮10和调节拉杆9,限深轮10可转动连接在机架17上,调节拉杆9安装在机架17上,并驱动连接限深轮10。限深轮10与调节拉杆9组成限深装置,连接在机架17上。
44.轮子16通过轮轴设置在机架17的两端。
45.将上述优选的实施方式进行任意组合可以得到更优的实施方式,下面将所有实施方式进行组合后得到的一种最优的实施方式进行具体描述。
46.一种残留地膜智能抽取装置,包括翻土装置、收集装置、勾膜拾取一体化装置、自动导航装置和支撑整个残留地膜智能抽取装置的机架17,翻土装置是翻土刀片1、翻土刀架15、双轴电机2的组合体,翻土装置分别与机架17和伸缩杆4相连,伸缩杆4与外壳3相连。通过伸缩杆4和限深装置,限深翻土的同时可以避开较为坚硬的障碍物。铝板21通过螺栓连接在机架17上,重力感应装置20设立在铝板21上。外壳3固定在铝板21上。麦克纳姆轮14与连接装置18相连,连接装置固定在机架17上,驱动电机19通过连接装置18与麦克纳姆轮14相连.挡板13固定在机架17的最前方,阻挡较为坚硬的障碍物。电动推杆12一端连接在小型材,小型材则与机架17相连,另一端与收集箱5连接。脱膜板6通过螺栓连接,固定在机架17上。弹齿8固定在传送带装置7上,传送带装置7上设有电机连接座,与调速电机11连接。同时传送带装置7上开设有螺孔,通过杆子与机架17连接。限深轮10与调节拉杆9组成限深装置,连接在机架17上。轮子16通过轮轴设置在机架17的两端。
47.工作原理:
48.首先通过已设置好的程序,利用自动导航配合,完成整个装置的启动。操作者可以
通过misson planner软件输入指令或选择内置的自动导航指令进行操作,指令通过数据通信的协调被发送至主控制组件处理,再由主控制组件发送至各部件的控制驱动,从而达成各个装置的协调统一。
49.前半部分为翻土装置,其中主要由两组翻土旋刀、两个电机以及两组电机驱动组成,通过主控板传输数据至电机驱动,电机驱动进行带动电机进行运作,从而使翻土旋刀进行工作,在对土地进行耕耘的同时,为后续的勾膜工作提供便利。
50.后半部分为勾膜拾取一体化装置,通过事先调整好的弹齿结构进行勾膜,单独的弹齿结构可以使土壤与地膜在一定程度上得到分离,再通过多个弹齿结构与电机的配合提高勾膜的效率,在翻土结构的良好铺路下,再配合各个驱动电机的速度,精准稳定地实现勾取残膜的工作。
51.中间是收集装置,其中主要是由收集箱和重力感应系统组成,通过重力感应当收集箱增加达到10千克时(相当于4亩地残留的地膜)小车停止作业,将已收入的残膜运送到指定的回收地点,然后返回继续工作。这样有效的减少人力的投入,并且还防止了因为残膜回收过多而溢出导致的二次污染。
52.在实现弹簧钩的运行后,收集工作加装了传送带结构,可以有效的将收集到的残膜运输至收集箱,通过主控板的精密计算,从而实现上述结构的紧密配合,最终达成自动化的地膜抽取,实现本项目的功能。
53.以上详细描述了本实用新型的较佳具体实施例。应当理解,本领域的普通技术人员无需创造性劳动就可以根据本实用新型的构思做出诸多修改和变化。因此,凡本技术领域中技术人员依本实用新型的构思在现有技术的基础上通过逻辑分析、推理或者有限的实验可以得到的技术方案,皆应在由权利要求书所确定的保护范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1