喂食器的制作方法
1.本技术涉及宠物喂食设备技术领域,尤其是涉及一种喂食器。
背景技术:
2.喂食器是可以用于宠物饲养的装置。通常情况下,喂食器一般至少包括用于储存宠物食物的碗状/盆状/桶状容器。通过喂食器,可以让宠物吃到干净卫生的食物。
3.但是就目前的喂食器而言,大部分喂食器都是作为普通容器使用。对于具有多个宠物的场景,在喂食时,往往多个宠物一同抢食,喂食混乱,不利于宠物的喂养和管理,而且混乱的喂食过程可能会导致食料浪费。
技术实现要素:
4.本技术主要解决的技术问题是提供喂食器,能够改善现有的喂食器在喂食时出现的喂食混乱的问题。
5.为解决上述技术问题,本技术采用的一个技术方案是:提供一种喂食器,该喂食器包括喂食组件,设有用于储存宠物食料且具有开口的容置空间;可活动地设置于喂食组件的门板组件;传动连接门板组件的致动机构,用于驱动门板组件在第一状态和第二状态之间切换;其中,门板组件在第一状态时,盖合开口;门板组件在第二状态时,打开开口并围挡于开口的部分外周,进而在预设方向形成敞口,使得宠物能够经敞口食用到容置空间内的食料。
6.本技术的有益效果是:区别于现有技术的情况,通过在喂食组件上设置门板组件,在宠物需要进食的时候,门板组件处于第二状态以将储存宠物食料的容置空间暴露出来,使得宠物能够经开口食用到容置空间内的宠物食料。另外,在门板组件处于第二状态时,围挡于开口的部分外周,在预设方向上形成敞口,引导宠物在预设方向进食,同时降低了其他宠物在该宠物进食时在预设方向以外的方向食用容置空间内的食料的可能性,进而改善在对宠物喂食时可能出现的喂食混乱的问题。
附图说明
7.图1是本技术喂食器实施例处于第一状态的结构示意图;
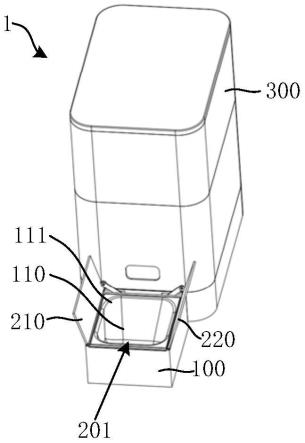
8.图2是本技术喂食器实施例处于第二状态的结构示意图;
9.图3是图2的局部放大图;
10.图4是本技术喂食器实施例的传动机构的结构示意图;
11.图5是本技术喂食器实施例的传动机构在第一状态下的原理示意图;
12.图6是本技术喂食器实施例的传动机构在第二状态下的原理示意图;
13.图7是本技术喂食器实施例的射频电路和控制器的模块示意图。
具体实施方式
14.下面将结合本技术实施例中的附图,对本技术实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅是本技术的一部分实施例,而不是全部的实施例。基于本技术中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本技术保护的范围。
15.喂食器是宠物饲养中常用的装置。喂食器一般具有容置空间,该容置空间可以储存宠物食料以方便宠物食用。
16.本技术发明人经过长期研究发现,在相关技术中,当喂食器的容置空间敞开后,多个宠物很有可能围着喂食器将位于容置空间的宠物食料分食,出现抢食,进而不仅出现喂食场面混乱,也可能出现喂食食材混乱。因为不同的宠物适合进食的食料可能不同,即使同一类型的宠物在不同的生长阶段适合进食的食料也有较大差异。宠物摄入一些不合适的食料有可能会存在一些健康风险。为了解决上述技术问题,本技术提出以下实施例。
17.在本技术喂食器实施例中,如图1所示,喂食器1可以包括喂食组件100、门板组件200和主体300。
18.主体300可以开设有储料空间以及连通储料空间的供料通道。供料通道可以在主体300的外侧壁形成有出料口。其中储料空间可以储存宠物食料。
19.其中,喂食组件100可以设有用于储存宠物食料的容置空间110。容置空间110可以具有开口111。在一些示例中,喂食组件100可以连接于主体300的外侧。可选地,储存在储料空间的宠物食料可以经供料通道朝向容置空间110运输,而输送至容置空间110内。在一些示例中,出料口可以位于喂食组件100的上方。由此,储料空间与储料口设置有高度差,以能够利用重力实现宠物食料的转运。在一些示例中,主体300可以实现定时、定量向容置空间110输送宠物食料。
20.门板组件200可以可活动地设置于喂食组件100。在一些示例中,门板组件200可以用于遮挡开口111(参见图2或图3)。门板组件200遮挡开口111可以认为是门板组件200覆盖了开口111,以阻挡宠物经开口111接触到容置空间110内的食料。通过这种方式,能够将位于容置空间100的宠物食料保护起来,起到阻挡宠物进食、抑制一些有害生物侵入或抑制宠物食料受潮的作用。当开口111打开时(这意味着此时遮挡开口111的门板组件200至少部分从开口111处移开),宠物可以食用容置空间110内部的宠物食料,或者可以向容置110空间内添加宠物食料。
21.参见图1、图2和图3,在一些示例中,门板组件200可以在第一状态和第二状态之间切换。其中,相较于第一状态,门板组件200处于第二状态更有利于宠物进食、宠物食料的添加。相较于第二状态,门板组件200处于第一状态时更有利于阻挡宠物进食、抑制一些有害生物侵入或抑制宠物食料受潮具体而言,门板组件200在第一状态时,开口111被门板组件200盖合。当门板组件200在第二状态时,开口111被打开。在第二状态时,门板组件200可以围挡于开口111的部分外周,进而在预设方向形成敞口201,使得宠物能够经敞口201食用到容置空间110内的食料。
22.区别于现有技术的情况,通过在喂食组件100上设置门板组件200,在宠物需要进食的时候,门板组件200处于第二状态以将储存宠物食料的容置空间110暴露出来,使得宠物能够经开口111食用到宠物食料。另外,在门板组件200处于第二状态时,围挡于开口111
的部分外周,在预设方向上形成敞口201,引导宠物在预设方向进食,同时降低了其他宠物在该宠物进食时在预设方向以外的方向食用容置空间110内的食料的可能性。
23.在一些示例中,在门板组件200处于第二状态时,门板组件200可以与主体300的外侧壁共同围挡于开口111的部分外周。其中,敞口201可以与主体300相对设置。
24.开口111被盖合和被打开是相对而言的。因此开口111被盖合并不必然意味着门板组件200将开口111完全密封。在一些情况下,门板组件200将开口111部分密封同样可以起到阻碍宠物进食、或者阻碍向容置空间110内部添加宠物食料的作用。同样,开口111被打开并不必然意味着门板组件200完全不遮挡开口111,开口111被打开意味着可允许宠物进食,或者允许向容置空间110添加宠物食料。
25.在一些示例中,喂食组件100包括形成有容纳腔的底座和可拆卸地容置于容纳腔的食碗。其中,容置空间110可以开设于食碗。门板组件200可以可活动地连接于底座。
26.在一些示例中,门板组件200可以包括第一门板210和第二门板220。在一些示例中,第一门板210和第二门板220可以可转动地设置于喂食组件100。在门板组件200处于第一状态时,第一门板210和第二门板220彼此拼合,以盖合开口111。在门板组件200处于第二状态时,第一门板210和第二门板220彼此相对设置,以打开开口111。另外,在在门板组件200处于第二状态时,第一门板210、第二门板220可以与主体300的外侧壁围挡于开口111的部分外周。在这种情况下,第一门板210、第二门板220和主体300的外侧壁可以在预设方向以外的方向阻碍宠物进食,由此能够降低在目标宠物在敞口201的方向进食时,其他宠物在预设方向以外的方向同时进食的可能性。其中,目标宠物可以指的是允许食用该容置空间110中的宠物食料的宠物。
27.在一些示例中,第一门板210可以以绕第一预设轴线211转动的方式设置于喂食组件100。第二门板220可以以绕第二预设轴线221转动的方式设置于喂食组件100。其中,第一预设轴线211可以和第二预设轴线221平行。第一预设轴线211可以和第二预设轴线221位于开口111外周的相对两侧。第一门板210远离第一预设轴线211的一侧和第二门板220远离第二预设轴线221的一侧在转动时彼此靠近或者远离。
28.在一些示例中,第一门板210和第二门板220的状态切换(由第一状态切换为第二状态或者由第二状态切换为第一状态)可以是同时的或不同时的。在一些示例中,第一门板210和第二门板220的状态切换可以是彼此独立的或彼此联动的。在一些示例中,门板组件200处于第一状态时,第一门板210和/或第二门板220的法向可以和开口111的朝向具有0至20度的夹角。门板组件200处于第二状态时,第一门板210和/或第二门板220的法向可以和开口111的朝向具有45至90度的夹角。
29.参见图4、图5和图6,在一些示例中,喂食器1还可以包括传动连接门板组件200的致动机构400。致动机构400可以用于驱动门板组件200在第一状态和第二状态之间切换。具体而言,致动机构400可以用于驱动第一门板210和第二门板220分别相对于喂食组件100转动。在一些示例中,致动机构400可以设置于主体300和/或喂食组件100。
30.在一些示例中,致动机构400可以包括驱动电机410和传动机构420。其中,传动机构420可以传动连接第一门板210和第二门板220。驱动电机410可以通过传动机构420驱动第一门板210和第二门板220相对于喂食组件100转动。
31.在一些示例中,传动机构420可以包括电机连杆421、第一传动连杆422和第二传动
连杆423。其中,电机连杆421的一端可以与驱动电机410的输出轴固定连接。第一传动连杆422可以分别连接于第一门板210和电机连杆421。第二传动连杆423可以分别连接于第二门板220和电机连杆421。电机连杆421、第一传动连杆422和第二传动连杆423的长度方向可以垂直与输出轴的轴线方向。由此,传动机构420能够同时控制第一门板210和第二门板220移动。
32.优选地,第一传动连杆422可以分别铰接于第一门板210和电机连杆421。第二传动连杆423可以分别铰接于第二门板220和电机连杆421。具体而言,第一传动连杆422的一端可以铰接于第一门板210,另一端可以铰接于电机连杆421的远离输出轴的一端。第二传动连杆423的一端可以铰接于第二门板220,另一端铰接于电机连杆421的远离输出轴的一端。其中,第一传动连杆422和第二传动连杆423的长度可以不同。在另一些示例中,第一传动连杆422和第二传动连杆423的长度可以不同。
33.参见图5和图6,致动机构400可以实现控制门板组件200从第一状态切换至第二状态的原理为:当驱动电机410转动的时候,带动电机连杆421转动,进而驱动第一传动连杆422和第二传动连杆423移动。由于第一传动连杆422和第二传动连杆423铰接于电机连杆421,因此在第一传动连杆422和第二传动连杆423在移动的过程中还能够适应性地调整和电机连杆421的角度,降低了传动机构420卡滞的可能性。由于第一门板210和第二门板220分别可转动地设置于喂食组件100,当第一传动连杆422和第二传动连杆423移动时,第一门板210和第二门板220受力可以分别绕第一预设轴线211和第二预设轴线221转动。基于同样的原理,致动机构400可以实现控制门板组件200从第二状态切换至第一状态。
34.参见图7,在一些示例中,喂食器1还可以包括与致动机构400电连接的控制器500以及与控制器500电连接的射频电路600。其中,控制器500可以用于通过射频电路600获取宠物携带的电子标签所对应的宠物身份信息。当宠物身份信息与预设宠物身份信息相匹配时,控制致动机构400驱动门板组件200从第一状态切换至第二状态。也就是说,当射频电路600识别到目标宠物后,控制第一门板210和第二门板220打开,目标宠物可以在预设方向的敞口201处进食,并且第一门板210、第二门板220和主体300可以限制其他宠物在预设方向以外的方向进食。
35.在一些示例中,控制器500在获取到相匹配的宠物身份信息切换至未获取到相匹配的宠物身份信息时,可以控制致动机构400驱动门板组件200从第二状态切换至第一状态。在这种情况下,当射频电路600没有识别到目标宠物时,可以通过门板组件200将开口111盖合。在这种情况下,可以起到阻挡其他宠物进食、抑制一些有害生物侵入或抑制宠物食料受潮的作用。
36.通常情况下,射频电路600可以感应到预设距离内的电子标签。因此当目标宠物进入射频电路600可到感应的距离时,控制器500可以控制门板组件200切换为第二状态,以使目标宠物能够进食并限制其他宠物进食。当目标宠物完成进食、或者暂时没有意愿进食而远离喂食器1时,当超出射频电路600可感应到的距离时,控制器500能够即时控制门板组件200将开口111盖合,以保护宠物食料。
37.在一些示例中,电子标签可以是挂在宠物脖子或者脚腕的电子项圈。在这种情况下,射频电路600的设置位置可以根据宠物的外形尺寸、电子标签佩戴位置进行调整。例如射频电路600可以位于喂食组件100中食碗(容置空间110)的下方。例如,可以电子项圈佩戴
于目标宠物的脖子,在目标宠物的头部大致位于容置空间110的上方时,射频电路600感应到目标宠物并控制门板组件200切换至第二状态,使得目标宠物能够进食。
38.综上所述,本技术喂食器实施例中,通过在喂食组件100上设置门板组件200,在目标宠物需要进食的时候,门板组件200切换至第二状态以将位于容置空间110的食料暴露出来供目标宠物进食。另外,在门板组件200处于第二状态时,围挡于开口111的部分外周,在预设方向上形成敞口201,引导目标宠物在预设方向进食,同时降低了其他宠物在该宠物进食时在预设方向以外的方向食用容置空间110内的食料的可能性。由此,能够针对目标宠物进行单独喂养,降低了多只宠物产生误食现象的可能性。
39.以上所述仅为本技术的实施例,并非因此限制本技术的专利范围,凡是利用本技术说明书及附图内容所作的等效结构或等效流程变换,或直接或间接运用在其他相关的技术领域,均同理包括在本技术的专利保护范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1