一种鱼缸水位监控器的制作方法
1.本技术涉及液位监控技术领域,涉及一种水位监控器。
背景技术:
2.热带小鱼是人们家里常见的观赏鱼,很多家庭都使用鱼缸来养热带小鱼,但是热带小鱼生命脆弱,对养殖水的水质和温度要求很高,所以稍不留神就死鱼,特别是家里长期无人管理时,由于过滤泵不停的水循环,水分蒸发加快,当鱼缸水位过低时,水中加热泵会自我不保护不再加热,水温无法保证热带小鱼所需的温度,容易造成死鱼。因此自动补水是养鱼家庭十分必要的装置。目前已经有一些鱼缸已经具有自动补水的装置,常见的有利用浮球阀进行补水自动控制的检测,供水系统需要很大压力,且浮球阀容易老化堵塞,控制效果不好;利用电子球阀进行补水控制,电子球阀上易于滋生藻类,异物干扰性大,效果不好。
技术实现要素:
3.为解决背景技术中指出的问题,采取如下技术方案:
4.一种鱼缸水位监控器,包括壳体,设置于所述壳体内部的半导体激光器,等腰直角三棱镜,光电探测器;所述等腰直角三棱镜包括第一直角面、第二直角面、斜面,所述壳体的四周侧壁设有若干个通孔,半导体激光器发出的激光为竖直向上的平行光,激光与第一直角面垂直,垂直进入等腰直角三棱镜内部的激光在所述斜面上被分为反射光束和透射光束,反射光束为水平方向,反射光束经等腰直角三棱镜内部从第二直角面水平射出后进入光电探测器。
5.上述方案的等腰直角三棱镜的横截面为等腰三角形。其中所述的第一直角面、第二直角面、斜面构成等腰直角三棱镜的三个光学面;第一直角面和第二直角面相互垂直;使用时第一直角面水平方向放置。
6.激光束竖直入射到腰直角三棱镜,如果液面高于激光与斜面的入射点,入射角为45度,玻璃的折射率约为1.5,水的折射率约为1.33,由于玻璃的反射率约为4%,因此约96%光线折射出射至空气中;如果液面低于激光与斜面的入射点,光线到棱镜处,入射角为45度,空气的折射率约1,此时满足全反射条件,则会发生全反射,光线全部反射至光电探测器上。
7.进一步方案:壳体外侧壁设置有若干吸盘。用于与鱼缸内壁吸附。
8.本技术方案的优点是:利用等腰直角三棱镜的全反射原理实现了水位监控,通过光电探测器作为接收器结构简单、反应灵敏度高,可推广应用于液面监控及液位自动化控制。
附图说明
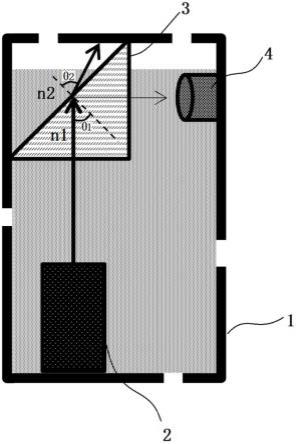
9.图1:实施例一中鱼缸水位监控器浸没水中示意图;
10.图2:实施例一中鱼缸水位监控器缺水示意图;
11.图3:实施例二鱼缸水位监控器示意图;
12.图4:实施例三鱼缸水位监控器示意图;
13.图5:实施例五鱼缸水位监控器示意图;
14.图6:实施例六鱼缸水位监控器示意图;
15.其中:1.壳体,2.半导体激光器,3.等腰直角三棱镜,4.光电探测器;
16.5.初级过滤棉层,6.活性炭层,7.石英砂层,8.次级过滤棉层。
具体实施方式
17.为了使本技术的目的、技术方案和优点更加清楚,下面将合附图对本技术做进一步地详细描述。以下,本技术术语“第一”、“第二”仅用于描述目的,而不能理解为指示或暗示相对重要性或者隐含指明所指示的技术特征的数量。
18.实施例一
19.一种鱼缸水位监控器,如图1所示,包括壳体1,设置于所述壳体内部的半导体激光器2,等腰直角三棱镜3,光电探测器4;所述等腰直角三棱镜包括第一直角面、第二直角面、斜面,所述壳体的四周侧壁设有若干个通孔,半导体激光器发出的激光为竖直向上的平行光,激光与第一直角面垂直,垂直进入等腰直角三棱镜内部的激光在所述斜面上被分为反射光束和透射光束,反射光束为水平方向,反射光束经等腰直角三棱镜内部从第二直角面水平射出后进入光电探测器。
20.使用时将鱼缸水位监控器设置在鱼缸内部液面附近,假设玻璃折射率为n1,在斜面上激光的入射角为θ1,液面中折射率为n2,折射角度为θ2;本技术的θ1为45
°
,n1为1.5,n2 为1.33,此时液体中发生全反射的临界角为arcsin(n2/n1)=62.45
°
,此时入射角小于水中临界角不会发生全反射,根据折射定律可知n1sin(θ1)=n2sin(θ2)可求得折射角为θ2=52.89
°
;常规玻璃反射率为4%,此时激光在所述斜面引折射的透射光束能量约为96%,4%能量反射光束进入光电探测器,光电探测器对此微弱的光无响应说明鱼缸不需要补水。当水位不足时,如图2 所示,折射光位于空气中,折射率n3约等于1,θ1为45
°
,n1为1.5,此时空气中全反射的临界角为arcsin(n3/n1)=41.8
°
,此时入射角大于此临界角发生全反射;此时激光在所述斜面引折射的透射光束能量约为0,能量通过全反射全部进入光电探测器,光电探测器接收到反射光信号说明鱼缸水位低于预设水位需要补水。
21.等腰直角三棱镜选用透明光学材料,折射率应大于1.42。当折射率为1.42时全反射临界角44.7
°
,入射角45
°
还可满足全反射条件。
22.实施例二
23.一种鱼缸水位监控器,如图3所示,包括壳体1,等腰直角三棱镜3、壳体内设置半导体激光器2、光电探测器4,壳体全封闭且透明,壳体外设置有用于装配等腰直角三棱镜的让位部,等腰直角三棱镜通过光胶装配于所述壳体的让位部;所述等腰直角三棱镜包括第一直角面、第二直角面、斜面,半导体激光器发出的激光为竖直向上的平行光,激光与第一直角面垂直,垂直进入等腰直角三棱镜内部的激光在所述斜面上被分为反射光束和透射光束,反射光束为水平方向,反射光束经等腰直角三棱镜内部从第二直角面水平射出后进入光电探测器。
24.本壳体密封,可有效避免鱼缸中容易因水质变差例如爆发藻类污染半导体激光器
和光电探测器。
25.实施例三
26.一种鱼缸水位监控器,如图4所示,包括半导体激光器2、等腰直角三棱镜3、光电探测器4;所述等腰直角三棱镜包括第一直角面、第二直角面、斜面;半导体激光器与第一直角面通过光学胶连接;光电探测器与第二直角面通过光学胶连接;半导体激光器发出的激光为竖直向上的平行光,激光与第一直角面垂直,垂直进入等腰直角三棱镜内部的激光在所述斜面上被分为反射光束和透射光束,反射光束为水平方向,反射光束经等腰直角三棱镜内部从第二直角面水平射出后进入光电探测器。
27.本方案结构最简单,直接将三核心部件通过光学胶固定连接,成本最低。
28.实施例四
29.实施例一至三基础上一种鱼缸水位监控器,还包括时间继电器,控制器,常闭电磁阀;光电探测器输出信号传输至控制器,控制器与常闭电磁阀连接,用于控制闭电磁阀开关;时间继电器与半导体激光器相连接,用于控制半导体激光器周期性发光。
30.例如时间继电器每隔一段固定的时间(2-5小时),导通半导体激光器的电源,半导体激光器发出光线,入射到等腰直角三棱镜上面,如果液面高于入射光与斜面的入射点,光线约 (96%)入射至等腰直角三棱镜内部,然后出射至空气中,此时表示液面安全,不需要补水;如果液面低于斜面的入射点,光线到等腰直角三棱镜斜面处,则会发生全反射,光线全部反射至光电探测器上,光电探测器则输出信号给控制器,然后控制器打开常闭电磁阀,给鱼缸补水;同时控制器给出信号给时间继电器,时间继电器处于连续工作状态,直到鱼缸补水完成,光线不再全反射至光电探测器,此时控制器给出信号给时间继电器,时间继电器处于固定间隔时间工作。
31.实施例五
32.实施例一至三基础上一种鱼缸水位监控器,如图5所示还包括:净水滤盒,净水滤盒自上而向依次包括:初级过滤棉层5、活性炭层6、石英砂层7、次级过滤棉层8;初级过滤棉层、活性炭层、石英砂层、次级过滤棉层的侧壁均为直径逐步收缩的漏斗形。自来水经过常闭电磁阀,自来水依次进入初级过滤棉层,活性炭包,石英砂包,次级过滤棉层。自来水经过四层过滤,即变成纯净水,满足观赏鱼的生活。该直径逐步收缩的漏斗形优点是,自来水依次进入初级过滤棉层的一级水直接进入活性炭层中,塔形结构的水可以最大程度保证一级水进入活性炭中过滤,而不是从活性炭层与瓶壁的缝隙中流走,得不到过滤。
33.实施例六
34.如图6所示,包括壳体、若干个实施例四所述的鱼缸水位监控器,若干个鱼缸水位监控器沿着竖直方向依次设置于壳体内壁,组成监控器阵列;壳体的四周侧壁设有若干个通孔。该方案可实现对多个目标水位高度的监控。
35.本技术基于全反射原理,通过合理使用等腰直角三棱镜以及光电探测器实现了对鱼缸水位监控;本技术不仅局限于鱼缸水位的监控,还可推广至其他液位监控场景。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1