一种可调节钵苗夹取机构的制作方法
1.本实用新型属于农业机械技术领域,涉及一种钵苗夹取机构,特别是涉及一种可调节钵苗夹取机构。
背景技术:
2.水生蔬菜是我国区域性特色明显的优势农产品,国内水生蔬菜种植面积已达60万公顷以上,平均每年增长23.6%,产量每年增长31.5%,已成为蔬菜生产的重要支柱。随着农业市场需求的不断扩大,钵苗移栽技术已广泛用于蔬菜种植中,由于钵苗技术具有对气候补偿作用和提前实现农作物生育的双重优势,可使农作物大幅度增产。目前,钵苗移栽方式主要有手工移栽和机械移栽两种,手工移栽劳动强度大、效率低、难以完成大面积作业;机械移栽一般分为半自动和全自动两种,半自动移栽是由人工取苗,随后将取出的钵苗放置在相应的输送装置或直接送入栽植装置中,由于人工喂苗速度有限,频率参差不齐,且作业人员数量较多,很大程度上限制了移栽的工作效率,机械化效益不明显;而全自动移栽一般采用凸轮机构或液压机构的机械手来实现对幼苗的夹取和投放。对于凸轮机构的机械手,由于其取苗爪行程小且取苗直径不可调整,所以适用范围小;对于液压机构的机械手,需要额外采用液压系统完成秧苗的夹取和投放过程,成本高,而且工作频率低。虽然机械化移栽代替手工移栽是当前技术的发展趋势,但机械化钵苗在移栽效率、移栽质量、移栽伤苗率等方面有待于进一步提升,以满足水生蔬菜的移栽农艺要求。
技术实现要素:
3.本实用新型的目的是针对目前机械钵苗移栽中存在的移栽效率低、移栽伤苗现象较多,导致移栽质量较低等不足,提出一种可调节钵苗夹取机构,取苗爪可根据取苗直径进行快速调整,降低移栽取苗过程伤苗现象,减少非工作行程时间,进一步提高钵苗夹取效率。
4.本实用新型的技术方案:一种可调节钵苗夹取机构,包括与整体钵苗装置连接的移栽臂;其特征在于:所述夹取机构还包括快速移动机构、固定取苗爪、活动取苗爪和弹性移动机构;所述快速移动机构连接设置在所述移栽臂的上方,所述固定取苗爪与所述移栽臂的头部连接固定,所述弹性移动机构设置在所述移栽臂的下方,并与快速移动机构相连接,所述活动取苗爪与所述弹性移动机构连接,并与固定取苗爪形成相对设置。
5.进一步的,所述快速移动机构由伺服电机、导轨、螺杆、支架、活动螺母、安装板、支撑和滑块连接组成;导轨与移栽臂连接固定,滑块与导轨滑动连接,支架架设在导轨的上方,安装板固定连接在支架上,安装板底部固定设有两个支撑,螺杆转动设置在两个支撑之间,伺服电机连接设置在螺杆的一端,活动螺母套设在螺杆上,活动螺母与滑块连接固定。
6.进一步的,所述弹性移动机构由弹簧、套筒、滑柱、气缸架和手指气缸连接组成;手指气缸固定设置在气缸架的内部,滑柱与套筒形成滑动连接,弹簧一端与活动取苗爪连接固定,弹簧另一端与滑柱连接固定,滑柱与手指气缸的输出端连接固定。
7.进一步的,所述固定取苗爪与活动取苗爪为两板状结构,且相互倾斜形成v形夹角,两个取苗爪的内侧面上端固定设有防滑软胶层,下端设有夹持槽;其中,活动取苗爪的外侧面设有连接柱,连接柱与弹簧固定连接。
8.进一步的,所述v形夹角的夹角角度不大于5
°
。
9.进一步的,所述弹簧为低劲度系数的压缩弹簧。
10.进一步的,所述夹持槽为矩形槽,夹持槽的槽深小于取苗爪的板厚。
11.进一步的,所述防滑软胶层表面设有斜锯齿,斜锯齿的齿尖角不大于30
°
。
12.进一步的,所述快速移动机构与弹性移动机构之间通过连杆连接,具体为连杆的一端与滑块连接固定,连杆的另一端分别与气缸架和套筒连接固定。
13.进一步的,所述套筒、滑柱和手指气缸的输出轴同轴设置。
14.本实用新型的有益效果为:本实用新型提出的一种可调节钵苗夹取机构,机构整体由移栽臂、快速移动机构、固定取苗爪、活动取苗爪和弹性移动机构组成,通过快速移动机构带动活动取苗爪进行快速移动,以实现取苗爪向移栽苗的迅速靠拢,通过弹性移动机构对移栽苗进行弹性夹紧,本实用新型与现有的取苗机构相比,两取苗爪之间的移动距离较大,可以针对不同杆径移栽苗的夹取,通过快速移动机构可以减少空行程的时间,提高了夹取的速度,通过夹持槽可以对移栽苗的根系形成有效保护,防滑软胶层可以对移栽苗的茎杆进行弹性辅助夹紧,降低了移栽取苗过程伤苗现象,进一步提高了钵苗夹取效率。
附图说明
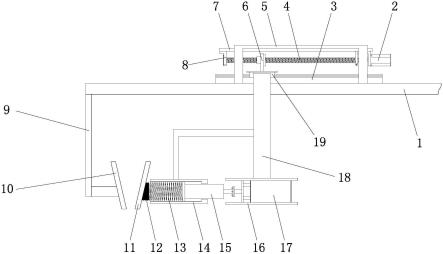
15.图1 为本实用新型整体结构示意图。
16.图2 为本实用新型中取苗爪的结构示意图。
17.图中:移栽臂1、伺服电机2、导轨3、螺杆4、支架5、活动螺母6、安装板7、支撑8、固定杆9、固定取苗爪10、活动取苗爪11、连接柱12、弹簧13、套筒14、滑柱15、气缸架16、手指气缸17、连杆18、滑块19、夹持槽20、防滑软胶层21。
具体实施方式
18.下面结合附图和具体实施方式,进一步阐明本实用新型,应理解这些实施方式仅用于说明本实用新型专利而不用于限制本实用新型专利的范围,在阅读了本实用新型专利之后,本领域技术人员对本实用新型专利的各种等价形式的修改均落于本技术所附权利要求所限定的范围。
19.实施例1
20.如图1-2所示,一种可调节钵苗夹取机构,包括移栽臂1、快速移动机构、固定取苗爪10、活动取苗爪11和弹性移动机构;快速移动机构由伺服电机2、导轨3、螺杆4、支架5、活动螺母6、安装板7、支撑8和滑块19连接组成;导轨3与移栽臂1连接固定,滑块19与导轨3滑动连接,支架5架设在导轨3的上方,安装板7固定连接在支架5上,安装板7底部固定设有两个支撑8,螺杆4转动设置在两个支撑8之间,伺服电机2连接设置在螺杆4的一端,活动螺母6套设在螺杆4上,活动螺母6与滑块19连接固定。快速移动机构连接设置在移栽臂1的上方,固定取苗爪10与移栽臂1的头部连接固定。弹性移动机构由弹簧13、套筒14、滑柱15、气缸架16和手指气缸17连接组成;手指气缸17固定设置在气缸架16的内部,滑柱15与套筒14形成
滑动连接,弹簧13一端与活动取苗爪11连接固定,弹簧13另一端与滑柱15连接固定,滑柱15与手指气缸17的输出端连接固定。弹性移动机构设置在移栽臂1的下方,并与快速移动机构相连接,活动取苗爪11与弹性移动机构连接,并与固定取苗爪10形成相对设置。
21.实施例2
22.与上述实施例1不同的是,一种可调节钵苗夹取机构,固定取苗爪10与活动取苗爪11为两板状结构,且相互倾斜形成v形夹角,两个取苗爪的内侧面上端固定设有防滑软胶层21,下端设有夹持槽20;其中,活动取苗爪11的外侧面设有连接柱12,连接柱12与弹簧13固定连接。v形夹角的夹角角度不大于5
°
。弹簧13为低劲度系数的压缩弹簧。夹持槽20为矩形槽,夹持槽20的槽深小于取苗爪的板厚。防滑软胶层21表面设有斜锯齿,斜锯齿的齿尖角不大于30
°
。快速移动机构与弹性移动机构之间通过连杆18连接,具体为连杆18的一端与滑块19连接固定,连杆18的另一端分别与气缸架16和套筒14连接固定。套筒14、滑柱15和手指气缸17的输出轴同轴设置。
23.如图1-2所示,一种可调节钵苗夹取机构的工作原理如下:通过伺服电机驱动螺杆在两个支撑中进行原地转动,螺杆的转动带动活动螺母在螺杆上进行往复直线运动,由于活动螺母与滑块固定连接,因此滑块在导轨上进行往复直线运动,滑块通过连杆与气缸架和套筒连接固定,因此气缸架与套筒均随着滑块的运动而运动,上述动作为活动取苗爪相对固定取苗爪的快速移动,利用快速移动机构实现活动取苗爪的快速且平稳的移动,当固定取苗爪靠近活动取苗爪时,快速移动机构停止运动,由弹性移动机构进行移动,通过手指气缸驱动滑柱在套筒内移动,由于活动取苗爪与滑柱之间设有低劲度系数压缩弹簧,因此活动取苗爪与固定取苗爪之间的夹紧为弹性夹紧,夹紧时具有一定的弹性缓冲,而取苗爪内侧面的软胶层也避免了对移栽苗的茎杆的夹伤,同时,取苗爪内侧面底部的夹持槽对带有培养土的移栽苗根部进行了限位放置,对根部起到了有效的保护,整个钵苗夹取机构实现了取苗爪的快速靠拢、弹性夹持、移栽、快速松开、快速靠拢、再弹性夹持的重复工作过程,降低了移栽取苗过程的伤苗现象,进一步提高了钵苗夹取效率。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1