一种无人机底部的激光雷达测试装置的制作方法
1.本实用新型涉及无人机检测领域,特别涉及一种无人机底部的激光雷达测试装置。
背景技术:
2.一般在进行地形勘测的时候,均需要通过激光雷达测试装置进行检测工作,目前,随着技术的进步,在进行检测的时候,一般需要借助无人机对野外的地形进行检测。
3.但是当测绘仪与无人机配合的时候,无人机在飞行的时候,外界的环境会对其产生很大的影响,例如枯叶、枯枝等,进而就会影响到检测结果,降低检测精准度,有待改进。
技术实现要素:
4.针对现有技术存在的不足,本实用新型的目的是提供一种无人机底部的激光雷达测试装置,具有提高检测精度的效果。
5.本实用新型的上述技术目的是通过以下技术方案得以实现的:一种无人机底部的激光雷达测试装置,包括:
6.测绘仪,用于对地形进行检测;
7.安装箱,设置于所述测绘仪的下方;
8.旋转叶,转动设置于所述安装箱的两端;
9.驱动机构,用于控制所述旋转叶旋转。
10.通过采用上述技术方案,当测试装置工作时,利用测绘仪对地形进行检测,并且当测绘仪工作时,利用驱动机构控制旋转叶旋转,对枯叶和枯枝进行及时清理,避免对测绘仪的工作造成影响,提高测绘仪的检测精度。
11.本实用新型在一较佳示例中可以进一步配置为:所述驱动机构包括:
12.麻花杆,水平滑动连接且滑动时转动连接于所述安装箱;
13.第一齿轮柱,水平设置于所述麻花杆的端部;
14.第二齿轮柱,水平转动连接于所述安装箱,且位于所述第一齿轮柱下方,并与所述旋转叶相固定;
15.限位杆,水平设置于所述第一齿轮柱和所述第二齿轮柱之间;
16.传动齿轮,设置于所述限位杆外壁,且与所述第一齿轮柱和所述第二齿轮柱相啮合;
17.控制机构,用于控制所述麻花杆往复水平运动。
18.通过采用上述技术方案,当控制旋转叶旋转时,利用控制机构驱动麻花杆水平往复运动,并且在麻花杆水平运动时,麻花杆自动旋转,此时麻花杆带动第一齿轮柱同步旋转。随后在传动齿轮的配合作用下,控制第二齿轮柱带动旋转叶旋转,实现枯枝的清理。因此通过设置结构巧妙,并且工作稳定的驱动机构,实现旋转叶的稳定旋转控制。
19.本实用新型在一较佳示例中可以进一步配置为:所述控制机构包括:
20.一对齿条,水平滑动连接于所述安装箱;
21.一对连杆,设置于一对所述齿条的端部,且与所述麻花杆转动连接;
22.主动齿轮,设置于一对所述齿条之间,且与一对所述齿条相啮合;
23.电机,用于控制所述主动齿轮正反转。
24.通过采用上述技术方案,当控制麻花杆工作时,利用电机控制主动齿轮正反转,此时主动齿轮带动一对齿条往复运动,并带动连杆同步运动,实现麻花杆工作的稳定控制。因此通过设置结构巧妙,并且工作稳定的控制机构,实现旋转叶的稳定旋转控制。
25.本实用新型在一较佳示例中可以进一步配置为:所述连杆与所述麻花杆的连接位置设置有轴承。
26.通过采用上述技术方案,通过设置轴承降低连接位置的阻力,使得麻花杆的旋转过程更加流畅。
27.本实用新型在一较佳示例中可以进一步配置为:所述第二齿轮柱和所述限位杆的端部之间设置有加强杆。
28.通过采用上述技术方案,通过设置加强杆,增加第二齿轮柱和限位杆之间的结构强度,保证两者工作时的稳定性。
29.本实用新型在一较佳示例中可以进一步配置为:所述旋转叶的边缘位置低于所述测绘仪。
30.通过采用上述技术方案,通过将旋转叶设置为低于测绘仪,既可以对枯枝进行清理,又可以保证测绘仪工作过程的稳定性。
31.本实用新型在一较佳示例中可以进一步配置为:所述安装箱的四周呈镂空状设置。
32.通过采用上述技术方案,通过将安装箱设置为镂空状,方便飞行时空气能流通,降低飞行时的阻力。
33.综上所述,本实用新型具有以下有益效果:
34.1.通过增设旋转叶,在测绘仪工作时,利用旋转叶的旋转对枯叶和枯枝进行及时清理,避免对测绘仪的工作造成影响,提高测绘仪的检测精度;
35.2.通过设置结构巧妙,并且工作稳定的驱动机构和控制机构,实现旋转叶的稳定旋转控制,从而实现枯枝的稳定清理;
36.3.通过将旋转叶设置为低于测绘仪,既可以对枯枝进行清理,又可以保证测绘仪工作过程的稳定性。
附图说明
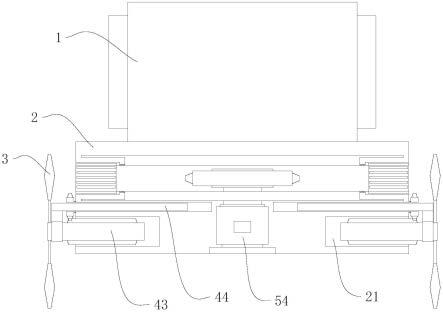
37.图1是实施例的结构示意图;
38.图2是实施例的驱动机构和控制机构的结构示意图。
39.附图标记:1、测绘仪;2、安装箱;21、收纳槽;3、旋转叶;4、驱动机构;41、麻花杆;42、第一齿轮柱;43、第二齿轮柱;44、限位杆;45、传动齿轮;46、加强杆;5、控制机构;51、齿条;52、连杆;53、主动齿轮;54、电机;55、轴承。
具体实施方式
40.以下结合附图对本实用新型作进一步详细说明。
41.如图1、图2所示,一种无人机底部的激光雷达测试装置,包括测绘仪1、安装箱2以及旋转叶3。测绘仪1呈长条形设置,且水平固定于无人机的底端。安装箱2呈长条形设置,且沿测绘仪1的长度方向固定于测绘仪1的下方。安装箱2的四周呈镂空状设置,方便气流的流动,降低飞行时的阻力。
42.如图1、图2所示,旋转叶3设置有一对,一对旋转叶3转动连接于安装箱2的两端,并用于在测绘仪1工作时,随枯叶和枯枝进行清理。同时旋转叶3的边缘位置低于测绘仪1,保证既可以对枯枝进行清理,又不会对测绘仪1的工作造成干扰。
43.因此当测试装置工作时,利用测绘仪1对地形进行检测,并且当测绘仪1工作时,利用驱动机构4控制旋转叶3旋转,对枯叶和枯枝进行及时清理,避免对测绘仪1的工作造成影响,提高测绘仪1的检测精度。
44.如图1、图2所示,安装箱2上设置有驱动机构4,用于控制旋转叶3旋转。驱动机构4包括麻花杆41、第一齿轮柱42、第二齿轮柱43、限位杆44以及传动齿轮45。
45.如图1、图2所示,麻花杆41水平滑动连接连接于安装箱2,麻花杆41外壁设置有螺旋状的导向槽,安装箱2上设置有嵌入导向槽内的导向块,以用于在麻花杆41水平滑移时,自动控制麻花杆41旋转。
46.如图1、图2所示,第一齿轮柱42水平设置于麻花杆41位于安装箱2外部的一端,且与麻花杆41相固定。第二齿轮柱43水平转动连接于安装箱2的外部,且位于第一齿轮柱42下方,并且旋转叶3固定与第二齿轮柱43的端部。
47.如图1、图2所示,限位杆44水平设置于第一齿轮柱42和第二齿轮柱43之间,第二齿轮柱43和限位杆44的端部之间设置有加强杆46,用于将两者固定在一起,形成支撑,保证两者的结构强度。传动齿轮45设置于限位杆44外壁,且分别与第一齿轮柱42和第二齿轮柱43相啮合,以用于在第一齿轮柱42旋转时带动第二齿轮柱43旋转。
48.如图1、图2所示,安装箱2上设置有控制机构5,用于控制麻花杆41往复水平运动。控制机构5包括一对齿条51、一对连杆52、主动齿轮53以及电机54。
49.如图1、图2所示,一对齿条51水平且并排设置于安装箱2的内部,且沿安装箱2的长度方向水平滑动连接于安装箱2。一对连杆52分别设置于一对齿条51的外端,并且麻花杆41转动连接与连杆52,同时两者的连接位置设置有轴承55。
50.如图1、图2所示,主动齿轮53转动连接于安装箱2的内部,主动齿轮53设置于一对齿条51之间,且分别与一对齿条51相啮合。电机54设置于安装箱2内部,并于主动齿轮53相连接,用于控制主动齿轮53正反转。
51.当测试装置工作时,启动电机54,利用电机54控制主动齿轮53往复旋转,此时主动齿轮53带动一对齿条51往复运动,一对齿条51带动连杆52同步运动,一对连杆52带动一对麻花杆41伸出或者收回。
52.与此同时,在麻花杆41水平运动时,在导向槽和导向块的配合作用下,保证麻花杆41伸出和缩回的过程中,都能够稳定的进行正反转。所以在麻花杆41正反转的过程中,将会带动第一齿轮柱42同步旋转。
53.当第一齿轮柱42旋转时,第一齿轮柱42带动传动齿轮45旋转,此时传动齿轮45带
动第二齿轮柱43同步旋转,以实现旋转叶3的旋转控制,并利用旋转叶3对枯叶和枯枝进行及时清理。
54.如图1、图2所示,其中第二齿轮柱43水平滑动连接于安装箱2,限位杆44螺纹连接于安装箱2,安装箱2上设置有供第二齿轮柱43和限位杆44滑移嵌入的收纳槽21,以便于在不工作时,第二齿轮柱43和限位杆44能够进行收纳。同时工作时,第二齿轮柱43和限位杆44处于不断伸出和缩回的状态,在控制旋转叶3旋转的同时,控制旋转叶2往复运动,实现枯枝的清理。
55.具体实施例仅仅是对本实用新型的解释,其并不是对本实用新型的限制,本领域技术人员在阅读完本说明书后可以根据需要对本实施例做出没有创造性贡献的修改,但只要在本实用新型的权利要求范围内都受到专利法的保护。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1