一种牵引式花生捡拾收获机的制作方法
1.本技术涉及农业机械技术领域,更具体地说,涉及一种牵引式花生捡拾收获机。
背景技术:
2.通过机械捡拾花生的方式,逐渐替代了人工捡拾的繁琐过程,减轻了工作人员的负担,然而,在提高机械化的同时,如何提高装置实用性显得尤为重要。
3.现有技术公开号为cn210580029u的文献提供一种牵引式花生捡拾收获机,可有效解决现有技术易造成碾压落果,不便于操作,或者在路上运输行走时过宽不安全也不易拖运的问题,其解决的技术方案是,机架的前端一侧铰链连接有牵引架,牵引架中部通过牵引液压油缸与机架前端中部铰链连接在一起,机架前端部悬空装有捡拾台,机架与捡拾台的升降油缸相连接,机架上装有震动筛,震动筛侧面的机架上装有变速箱,震动筛上方的机架上装有脱粒滚筒,脱粒滚筒一侧的机架上装有集草箱,机架上在脱粒滚筒上方装有果箱,果箱后端连接有提果器,本技术实用性强,使用效果好,方便拖运,操作简单,不会碾压落果,是牵引式花生捡拾收获机上的创新。
4.虽然该装置有益效果较多,但依然存在下列问题:装置排秧口、吸风机出风口均与集草箱相连通,花生秧收集至侧面的集草箱内再经出风力传送至外界环节中,但此操作下吹出的花生秧分散在花生地上,仍需人力对其进行堆积后才能将花生秧转移至下一处理环节,以便对花生秧进行再利用,人工堆积操作繁琐复杂,鉴于此,我们提出一种牵引式花生捡拾收获机。
技术实现要素:
5.1.要解决的技术问题
6.本技术的目的在于提供一种牵引式花生捡拾收获机,以解决上述背景技术中提出的问题。
7.2.技术方案
8.一种牵引式花生捡拾收获机,包括
9.捡拾台;
10.操控机架,所述捡拾台位于操控机架前端,所述操控机架后端设置有提果器;
11.集草箱,所述集草箱位于操控机架一侧,所述集草箱内部设置有排秧腔室,所述排秧腔室一端设置有堆积结构,
12.所述堆积结构包括横向堆积结构和翻转结构,所述横向堆积结构将集草箱内侧散落的花生秧统一堆积至翻转结构处,所述翻转结构将堆积成型的花生秧翻转至花生地处,便于工作人员对其进行收集,所述横向堆积操作包括滑道,所述集草箱顶端中部设置有滑道,所述滑道内侧设置有丝杆,所述丝杆外侧螺纹连接有限位块,所述限位块底端固定连接有滑块,所述滑块底端固定连接有电动伸缩杆,所述电动伸缩杆底端固定连接有耙条。
13.通过采用上述技术方案,使下移至集草箱内侧底端的耙条从集草箱一侧移动至集
草箱另一侧翻转结构处,将集草箱内侧散落的花生秧堆积在一处进行堆积塑型,便于进行下一步处理。
14.作为本技术文件技术方案的一种可选方案,所述丝杆一侧设置有固定块,所述固定块内侧设置有线性步进电机,所述线性步进电机输出端与丝杆一端固定连接,所述滑块内侧设置有卡槽,所述卡槽与滑道外侧滑动连接。
15.通过采用上述技术方案,使移动的限位块可带动与之固定连接的滑块沿滑道外侧滑动,进一步保证耙条移动的稳定性。
16.作为本技术文件技术方案的一种可选方案,所述翻转结构包括翻转板,所述集草箱内侧一端设置有翻转板,所述翻转板一端中部固定连接有转轴,所述转轴另一侧与电动机输出端固定连接,所述电动机嵌设在集草箱内侧。
17.通过采用上述技术方案,通过翻转结构的设置,可以将堆积好的花生秧从集草箱内侧移动至集草箱外侧花生地上,整理后的花生秧均匀散落,便于人工对其转移。
18.作为本技术文件技术方案的一种可选方案,所述集草箱内侧设置有传感器所述传感器通过操控机架处plc控制器与电动伸缩杆相连,所述电动伸缩杆通过plc控制器与线性步进电机控制开关相连。
19.通过采用上述技术方案,通过操控机架处plc控制器的设置,使传感器在察觉集草箱内部花生秧过多时,可启动电动伸缩杆,将耙条移动至集草箱内侧底端,以便堆积花生秧的操作,并在耙条到达相应位置后,线性步进电机启动,将耙条从集草箱一侧移动至集草箱另一侧,完成对集草箱内花生秧的堆积操作。
20.作为本技术文件技术方案的一种可选方案,所述电动机驱动开关通过plc控制器与反转的线性步进电机相连。
21.通过采用上述技术方案,通过plc控制器的设置,使完成堆积操作后进行反转将耙条移动至原处的线性步进电机启动电动机,完成对堆积塑型后的花生秧移出的操作。
22.3.有益效果
23.相比于现有技术,本技术的优点在于:
24.1.本技术通过横向堆积结构的设置,使下移至集草箱内侧底端的耙条从集草箱一侧移动至集草箱另一侧翻转结构处,将集草箱内侧散落的花生秧堆积在一处进行堆积塑型,便于进行下一步处理。
25.2.本技术通过翻转结构的设置,可以将堆积好的花生秧从集草箱内侧移动至集草箱外侧花生地上,整理后的花生秧均匀散落,便于人工对其转移。
附图说明
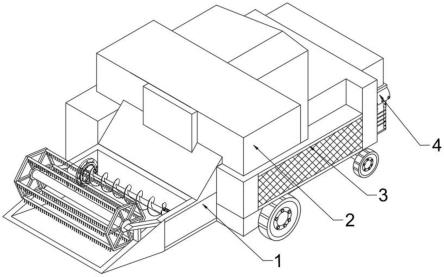
26.图1为本技术一较佳实施例公开的牵引式花生捡拾收获机的整体结构示意图;
27.图2为本技术一较佳实施例公开的牵引式花生捡拾收获机的集草箱结构示意图;
28.图3为本技术一较佳实施例公开的牵引式花生捡拾收获机的横向堆积结构示意图;
29.图4为本技术一较佳实施例公开的牵引式花生捡拾收获机的翻转结构示意图;
30.图中标号说明:1、捡拾台;2、操控机架;3、集草箱;4、提果器;5、排秧腔室;6、翻转板;7、传感器;8、耙条;9、电动伸缩杆;10、滑块;11、限位块;12、丝杆;13、滑道;14、固定块;
15、转轴;16、电动机。
具体实施方式
31.请参阅图1-4,本技术提供一种技术方案:
32.一种牵引式花生捡拾收获机,包括
33.捡拾台1;
34.操控机架2,捡拾台1位于操控机架2前端,操控机架2后端设置有提果器4;
35.集草箱3,集草箱3位于操控机架2一侧,集草箱3内部设置有排秧腔室5,排秧腔室5一端设置有堆积结构,
36.堆积结构包括横向堆积结构和翻转结构,横向堆积结构将集草箱3内侧散落的花生秧统一堆积至翻转结构处,翻转结构将堆积成型的花生秧翻转至花生地处,便于工作人员对其进行收集。
37.具体的,请参阅图3,横向堆积结构包括滑道13,集草箱3顶端中部设置有滑道13,滑道13内侧设置有丝杆12,丝杆12外侧螺纹连接有限位块11,限位块11底端固定连接有滑块10,滑块10底端固定连接有电动伸缩杆9,电动伸缩杆9底端固定连接有耙条8。
38.在这种技术方案中,使下移至集草箱3内侧底端的耙条8从集草箱3一侧移动至集草箱3另一侧翻转结构处,将集草箱3内侧散落的花生秧堆积在一处进行堆积塑型,便于进行下一步处理。
39.进一步的,请参阅图3,丝杆12一侧设置有固定块14,固定块14内侧设置有线性步进电机,线性步进电机输出端与丝杆12一端固定连接。
40.再进一步的,请参阅图3,滑块10内侧设置有卡槽,卡槽与滑道13外侧滑动连接。
41.在这种技术方案中,通过滑块10的设置,使移动的限位块11可带动与之固定连接的滑块10沿滑道13外侧滑动,进一步保证耙条8移动的稳定性。
42.更进一步的,请参阅图2、图4,翻转结构包括翻转板6,集草箱3内侧一端设置有翻转板6,翻转板6一端中部固定连接有转轴15,转轴15另一侧与电动机16输出端固定连接,电动机16嵌设在集草箱3内侧。
43.在这种技术方案中,通过翻转结构的设置,可以将堆积好的花生秧从集草箱3内侧移动至集草箱3外侧花生地上,整理后的花生秧均匀散落,便于人工对其转移。
44.更更进一步的,请参阅图2,集草箱3内侧设置有传感器7。
45.更更更进一步的,传感器7通过操控机架2处plc控制器与电动伸缩杆9相连,电动伸缩杆9通过plc控制器与线性步进电机控制开关相连。
46.在这种技术方案中,通过操控机架2处plc控制器的设置,使传感器7在察觉集草箱3内部花生秧过多时,可启动电动伸缩杆9,将耙条8移动至集草箱3内侧底端,以便堆积花生秧的操作,并在耙条8到达相应位置后,线性步进电机启动,将耙条8从集草箱3一侧移动至集草箱3另一侧,完成对集草箱3内花生秧的堆积操作。
47.更更更更进一步的,电动机16驱动开关通过plc控制器与反转的线性步进电机相连。
48.在这种技术方案中,通过plc控制器的设置,使完成堆积操作后进行反转将耙条8移动至原处的线性步进电机启动电动机16,完成对堆积塑型后的花生秧移出的操作。
49.当需要该牵引式花生捡拾收获机时,首先通过捡拾台1将花生置于脱粒滚筒中,然后经过震动筛筛选,花生秧收集至侧面的集草箱3内,经过筛选的花生进入后方的提果器4,当传感器7感知到花生秧堆积高度过高时,传感器7将电信号通过plc控制器传递至电动伸缩杆9处,电动伸缩杆9伸展带动耙条8移动,耙条8移动至集草箱3内侧底端,接着固定块14处线性步进电机启动,带动滑道13内部丝杆12转动,丝杆12转动带动限位块11移动,限位块11带动滑块10在滑道13外侧移动,滑块10移动带动电动伸缩杆9移动,电动伸缩杆9移动带动耙条8移动,耙条8移动将集草箱3内部一侧花生秧移动至集草箱3内部另一侧,花生秧在翻转板6处堆积,并在耙条8的作用下进一步塑型,花生秧堆积成型后,线性步进电机反转带动丝杆12反向转动,丝杆12反向转动将限位块11移动回原位,此时电动机16启动,电动机16带动转轴15转动,转轴15转动带动翻转板6转动,翻转板6转动,将堆积好的花生秧从集草箱3内侧移动至集草箱3外侧花生地上,整理后的花生秧均匀散落,便于人工对其转移,减轻了人力负担。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1