一种大葱联合收获机的制作方法
1.本实用新型属于农用机械技术领域,尤其涉及一种大葱联合收获机。
背景技术:
2.大葱在我国的种植分布非常广泛,遍及全国各地,随着大葱种植面积的日益增多,对于大葱的收获要求和效率要求越来越高,传统的大葱主要靠人工收获,会损耗大量的劳动力,工作效率低,生产成本高。
3.申请号为cn201811447266.5的发明专利公开了一种单行自走式大葱联合收获机,包括安装有动力系统的底盘,以及安装在底盘总架上的挖掘装置和夹持输送装置,所述底盘总架上还安装有位于夹持输送装置出料端的收集卸料装置,所述挖掘装置包括与底盘总架铰接的挖掘支撑架,以及与挖掘支撑架固接的挖掘铲,挖掘支撑架与底盘总架之间还通过提升液压缸连接,该发明可一次性完成单行大葱的挖掘、抖土、夹持输送、收集和成堆铺放,可以满足多种大葱收获要求,但该发明在收获土质粘性大的地块时,大葱净土不彻底,需要人工二次清理,降低了工作效率;大葱被挖掘装置挖出后会出现向夹持输送装置进料端反方向倾倒的现象,不利于大葱的有效输送;收集卸料装置结构复杂,制造成本高,并且在收集卸料过程中很容易损伤到大葱。
技术实现要素:
4.本实用新型要解决的主要技术问题是提供一种大葱输送效果好,净土彻底,收集卸料简单、可靠的大葱联合收获机。
5.为了解决上述技术问题,本实用新型提供如下技术方案:
6.一种大葱联合收获机,包括机体,机体的前端设置有挖掘组件,机体的后端设置有收集卸料装置,挖掘组件与收集卸料装置之间通过前低后高倾斜设置的输送装置进行大葱输送,输送装置靠近挖掘组件一端的上方设置有拨葱装置。
7.以下是本实用新型对上述技术方案的进一步优化:
8.挖掘组件包括挖掘支撑架,挖掘支撑架与机体铰接,挖掘支撑架的前端固接有挖掘铲,挖掘铲的后方铰接有抖土铲。
9.进一步优化:挖掘支撑架的前端靠近输送装置的一侧转动连接有抖土驱动轴,抖土驱动轴靠近抖土铲的一端固接有偏心轴,偏心轴上转动连接有抖土连接块,抖土连接块远离偏心轴的一端与抖土铲铰接。
10.进一步优化:拨葱装置包括间隔一定距离平行布设的两个骨架,骨架与输送装置的输送架固定连接,两个骨架之间转动连接有第一中间轴,第一中间轴上固接有多个拨葱架,任意一个骨架上安装有驱动第一中间轴转动的第一动力驱动装置。
11.进一步优化:收集卸料装置包括固接在机体上靠近输送装置出料口位置处的收集箱,收集箱内转动连接有第二中间轴,第二中间轴上固接有三个弧形板,机体上安装有驱动第二中间轴转动的第二动力驱动装置。
12.进一步优化:输送架的下方靠近其中部的位置处设置有第一清理装置,输送架的下方靠近输送装置出料口的位置处设置有第二清理装置,输送架的上方靠近输送装置出料端的位置处设置有导料组件。
13.进一步优化:第一清理装置包括间隔一定距离平行布设的第一安装板和第二安装板,第一安装板和第二安装板均与输送架固定连接,第一安装板和第二安装板之间转动连接有转动轴,转动轴上固接有至少一个清杂齿板。
14.进一步优化:第二清理装置包括第一滚刷和第二滚刷,第一滚刷和第二滚刷均与输送架转动连接。
15.进一步优化:导料组件包括间隔一定距离平行布设的两个导葱板,导葱板与输送架固定连接。
16.本实用新型通过合理化设计,拨葱装置助力挖掘铲挖掘出的大葱向输送装置的进料口方向倾倒,提高了大葱的输送效果;大葱经过抖土铲抖动,第一清理装置和第二清理装置对大葱根部的土块进行清理,大葱根部粘结的土块清理彻底;收集卸料装置结构简单,收集、卸料过程中不会挤伤大葱,收集、卸料效果好,且制造成本低。
17.下面结合附图和实施例对本实用新型进一步说明。
附图说明
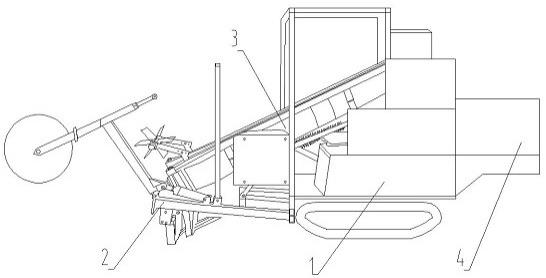
18.图1为本实用新型实施例的侧视结构示意图;
19.图2为本实用新型实施例中机体的结构示意图;
20.图3为本实用新型实施例中挖掘组件的结构示意图;
21.图4为图3中a处的放大结构示意图;
22.图5为本实用新型实施例中限深组件的结构示意图;
23.图6为本实用新型实施例中输送装置的结构示意图;
24.图7为本实用新型实施例中拨葱装置的结构示意图;
25.图8为本实用新型实施例中第一清理装置和除杂装置的结构示意图;
26.图9为本实用新型实施例中收集卸料装置的结构示意图;
27.图10为本实用新型实施例的后视结构示意图。
28.图中:1-机体;101-发动机;102-第一变速箱;103-第二变速箱;104-液压泵;2-挖掘组件;201-挖掘支撑架;202-挖掘铲;203-第一液压缸;204-抖土铲;2041-抖土轴座;2042-抖土驱动轴;2043-抖土连接块;2044-传动杆;205-限深组件;2051-限深支撑杆;2052-限深活动杆;2053-限深活动轮;206-第二液压缸;3-输送装置;301-输送架;302-夹持输送带;303-拨葱装置;3031-拨葱架;3032-骨架;3033-第一中间轴;3034-第一电机;304-第一清理装置;3041-清杂齿板;3042-转动轴;3043-液压马达;3044-第一安装板;3045-第二安装板;305-第二清理装置;3051-第一滚刷;3052-第二滚刷;306-导料组件;3061-导葱板;4-收集卸料装置;401-收集箱;402-第二电机;403-第二中间轴;404-弧形板。
具体实施方式
29.如图1所示,一种大葱联合收获机,包括机体1,机体1的前端设置有挖掘组件2,机体1的后端设置有收集卸料装置4,挖掘组件2与收集卸料装置4之间通过前低后高倾斜设置
的输送装置3进行大葱输送,输送装置3靠近挖掘组件2一端的上方设置有拨葱装置303。
30.机体1为整机的结构框架,用以支撑各部件。
31.如图2所示,机体1上固定安装有发动机101,发动机101的前端设置有第一变速箱102,发动机101的后端设置有液压泵104,发动机101的上方设置有第二变速箱103,第一变速箱102、第二变速箱103和液压泵104均与发动机101传动连接。
32.这样设计,大葱收获机的动力由发动机101提供,液压泵104通过液压管为大葱收获机的液压系统供给液压油。
33.发动机101优选柴油发动机。
34.如图3-4所示,挖掘组件2包括挖掘支撑架201,挖掘支撑架201与机体1铰接,挖掘支撑架201的前端固接有挖掘铲202,挖掘铲202的后方铰接有抖土铲204,挖掘支撑架201的前端远离输送装置3的一侧设置有限深组件205。
35.挖掘支撑架201的前端靠近输送装置3的一侧固接有抖土轴座2041,抖土轴座2041内转动连接有抖土驱动轴2042,抖土驱动轴2042靠近抖土铲204的一端固接有偏心轴,偏心轴位于抖土驱动轴2042端面上偏离轴心的位置处,偏心轴上转动连接有抖土连接块2043,抖土连接块2043远离偏心轴的一端与抖土铲204铰接,抖土驱动轴2042远离抖土连接块2043的一端通过传动杆2044与第一变速箱102传动连接。
36.这样设计,抖土驱动轴2042转动驱动抖土铲204快速抖动,从而方便将葱根上粘结的土块抖松、抖落。
37.机体1上铰接有第一液压缸203,第一液压缸203的活塞杆与支撑架201铰接。
38.这样设计,第一液压缸203驱动挖掘支撑架201向下摆动,进而使挖掘铲202插入地里将大葱刨起,第一液压缸203可以随意控制挖掘铲202的挖掘深度。
39.如图5所示,限深组件205包括限深支撑杆2051,限深支撑杆2051与挖掘支撑架201铰接,限深支撑杆2051远离挖掘支撑架201的一端滑动连接有限深活动杆2052,限深活动杆2052的底端转动连接有限深活动轮2053,限深支撑杆2051上螺纹连接有用于调整限深活动轮2053高度的调整螺杆。
40.挖掘支撑架201上铰接有第二液压缸206,第二液压缸206的活塞杆与限深支撑杆2051铰接。
41.输送装置3为现有技术,如图6所示,包括输送架301,输送架301与机体1固定连接,输送架301上设置有呈对称布设的两个夹持输送带302,夹持输送带302与第二变速箱103传动连接,用于将挖掘组件2挖出的大葱输送到收集卸料装置4。
42.输送架301的上方靠近输送装置3的进料口的位置处设置有拨葱装置303,输送架301的下方靠近其中部的位置处设置有第一清理装置304,输送架301的下方靠近输送装置3的出料口的位置处设置有第二清理装置305,输送架301的上方靠近输送装置3的出料端的位置处设置有导料组件306。
43.如图7所示,拨葱装置303包括间隔一定距离平行布设的两个骨架3032,骨架3032与输送架301固定连接,两个骨架3032之间通过轴承转动连接有第一中间轴3033,第一中间轴3033上固接有六个拨葱架3031,六个拨葱架3031沿第一中间轴3033的外表面呈环状布设。
44.本实施例外,拨葱架3031的数量还可以为三个、四个、五个或六个以上,拨葱架
3031由钢丝弯折而成。
45.任意一个骨架3032上安装有驱动第一中间轴3033转动的第一动力驱动装置。
46.第一动力驱动装置为第一电机3034,第一电机3034的输出端与第一中间轴3033传动连接。
47.这样设计,第一电机3034驱动第一中间轴3033转动,进而驱动拨葱架3031转动,将挖掘组件2刨出的大葱拨送到输送装置3的进料口,两个夹持输送带302再把大葱挤压输送到收集卸料装置4,避免了刨出的大葱向远离夹持输送带302的方向倾倒,提高了大葱的输送效果。
48.拨葱装置303通过第一电机3034提供独立的动力,可以根据现场的实际情况选择是否开启拨葱装置303和自由调节拨葱架3031的转速。
49.如图8所示,第一清理装置304包括间隔一定距离平行布设的第一安装板3044和第二安装板3045,第一安装板3044和第二安装板3045均与输送架301固定连接,第一安装板3044和第二安装板3045之间转动连接有转动轴3042,转动轴3042上固接有两个清杂齿板3041,两个清杂齿板3041沿转动轴3042的外表面呈环状布设。
50.本实施例外,清杂齿板3041的数量还可以为一个或两个以上。
51.清杂齿板3041的长度方向与输送装置3的大葱传输方向平行。
52.第二安装板3045上安装有液压马达3043,液压马达3043的输出端与转动轴3042传动连接。
53.清杂齿板3041由橡胶材质制成,从而避免伤害大葱的根部。
54.这样设计,液压马达3043驱动转动轴3042转动,进而通过清杂齿板3041清理掉大葱根部残留的土块,使大葱清理的更加干净。
55.第二清理装置305包括第一滚刷3051和第二滚刷3052,第一滚刷3051和第二滚刷3052均与输送架301转动连接,第一滚刷3051和第二滚刷3052均与第二变速箱103传动连接。
56.第一滚刷3051的长度方向和第二滚刷3052的长度方向均与输送装置3的大葱传输方向垂直。
57.这样设计,经过前面抖土铲204和清杂齿板3041两次清土后,如果仍然有小部分土块残存在大葱的根部,第一滚刷3051和第二滚刷3052会进一步将大葱根部的残土清除干净,减少后续人工清杂,从而提高了大葱的收获效率和大葱的清洁度,降低了工作人员的劳动强度。
58.导料组件306包括间隔一定距离平行布设的两个导葱板3061,导葱板3061与输送架301固定连接,用于将夹持输送带302输送来的大葱引导至收集卸料装置4。
59.这样设计,当大葱经夹持输送带302输送至出料口时,在导葱板3061的作用下,大葱沿其输送方向落入到收集卸料装置4内,有利于后期的打包。
60.如图9-10所示,收集卸料装置4包括收集箱401,收集箱401固接在机体1上靠近输送装置3出料口的位置处,收集箱401内转动有第二中间轴403,第二中间轴403上固接有三个弧形板404,三个弧形板404沿第二中间轴403的外表面呈环状布设。
61.本实施例外,弧形板404的数量还可以为两个或四个。
62.机体1上安装有驱动第二中间轴403转动的第二动力驱动装置。
63.第二动力驱动装置为第二电机402,第二中间轴403与第二电机402的输出端传动连接。
64.收集箱401的内壁上安装有用于测定弧形板404停止位置的检测开关,当弧形板404转动到靠近检测开关的位置时,检测开关将信号传动给控制装置,控制装置控制第二电机402停止转动,控制装置包括延时继电器,控制装置通过延时继电器控制、调节第二电机402的启动时间,以便根据收集箱401内大葱的实际情况进行弧形板404的翻转。
65.检测开关优选行程开关。
66.使用时,根据大葱栽种深度调节限深组件205至合适的位置,第一液压缸203动作驱动挖掘支撑架201摆动,进而使挖掘铲202插入土中,此时限深组件205起到限深作用。
67.然后由履带带动设备前进,同时,第一变速箱102驱动抖土铲204抖动,第一电机驱动拨葱装置303转动,第二变速箱103驱动夹持输送带302转动,两个夹持输送带302将挖掘铲202挖掘出的大葱传输到收集卸料装置4,抖土铲204起到第一次清理大葱根部土块的作用,拨葱装置303使大葱向输送装置3的进料口方向倾倒。
68.在大葱输送过程中,第一清理装置304和第二清理装置305进一步对大葱根部的土块进行清理。
69.当大葱经夹持输送带302输送至出料口时,在导葱板3061的作用下,大葱沿其输送方向落入到收集箱401内,累积到一定数量后,第二电机402驱动弧形板404旋转,大葱沿设备前进方向成堆落到地面上,不会向一侧尚未收获的大葱倾倒,不会妨碍尚未收获大葱的收获。
70.对于本领域的普通技术人员而言,根据本发明的教导,在不脱离本发明的原理与精神的情况下,对实施方式所进行的改变、修改、替换和变型仍落入本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1