一种基于环形切割的松果采摘无人机
本发明涉及松果采摘,具体为一种基于环形切割的松果采摘无人机。
背景技术:
1、松果是一种成簇生长的林木球果,成熟后具有极高的药用价值和营养价值。作为我国生产的主要干果之一,松果在我国有大面积的种植土地,而且产量也已经占到世界松果总产量靠前的位置。
2、当前,我国大部分地区的松果采摘工作依旧通过于人工采摘或半机械化采摘方式来完成,像这样依靠人力不仅费时费力、劳动强度大,且在崎岖的山地工作还对采摘工人的人身安全没有任何保障。
3、为节省人力,提高松果采摘效率,自动化松果采摘机器的开发与研究具有非常深远的意义。对于利用机器实现松果的自动采摘这个领域的研究,我们已经取得了一定的进展与成果,但还未能达到对松果的自动识别,因此其采摘效率缓慢,且成本较高。此外,为保护母树的生长,确保未来的松果产量,相应的采摘机器在工作的同时也应该做好对松树的保护。
4、例如申请专利号为cn202010826732.1的专利文献公开了一种击打式松果采摘机器人,包括主体箱、底座、中控机构、回转机构、俯仰机构和击打机构,回转机构、俯仰机构、调平机构和击打机构均与中控机构电连接,该装置虽然从一定程度上解决了现有技术中由于松果果实生长区域较高,人工采摘不便,以及由于松果果柄木质化程度高,果实分离力大,松树枝条韧性强等恶劣的自然条件而导致松果采摘过程中出现采摘失败的问题。对松树的拍打不仅会影响采摘下来的松果的质量,而且会破坏松树的自身结构,影响其正常发育,造成未来的经济损失。
5、此外,我们知道,松果采摘无人机在采摘过程中需要相应的采摘机构进行相应的运动,这样才能保证将松果顺利摘下,但当采摘机构运动的同时难免会产生相应的振动,这样会大大影响装置的采摘效果。为了在一定程度上解决用于无人机松果采摘装置的采摘机构进行相应的运动时候会产生振动而影响对无人机和采摘机构的采摘效果的问题,申请专利号为cn202011074924.8的专利文献公开了一种无人机松果采摘装置,包括升降机构、减震机构、夹果机构、减震机构。所述减震机构包括锥形外壳、减震基体和减震杆。这一装置虽达到了它的目的,对松树的损伤也不是特别大,但由于其结构的限制,只能采摘竖直且头朝上的松果,采摘效率低下,而且该无人机需要人工来控制其飞控和采摘操作,其操控难度较高,需要专业人员进行,不能够大范围的使用,一定程度上影响了其采摘效率,且未解放人力。
技术实现思路
1、(一)解决的技术问题
2、针对现有技术的不足,本发明提供了一种基于环形切割的松果采摘无人机,解决了上述背景技术中提出的问题。
3、(二)技术方案
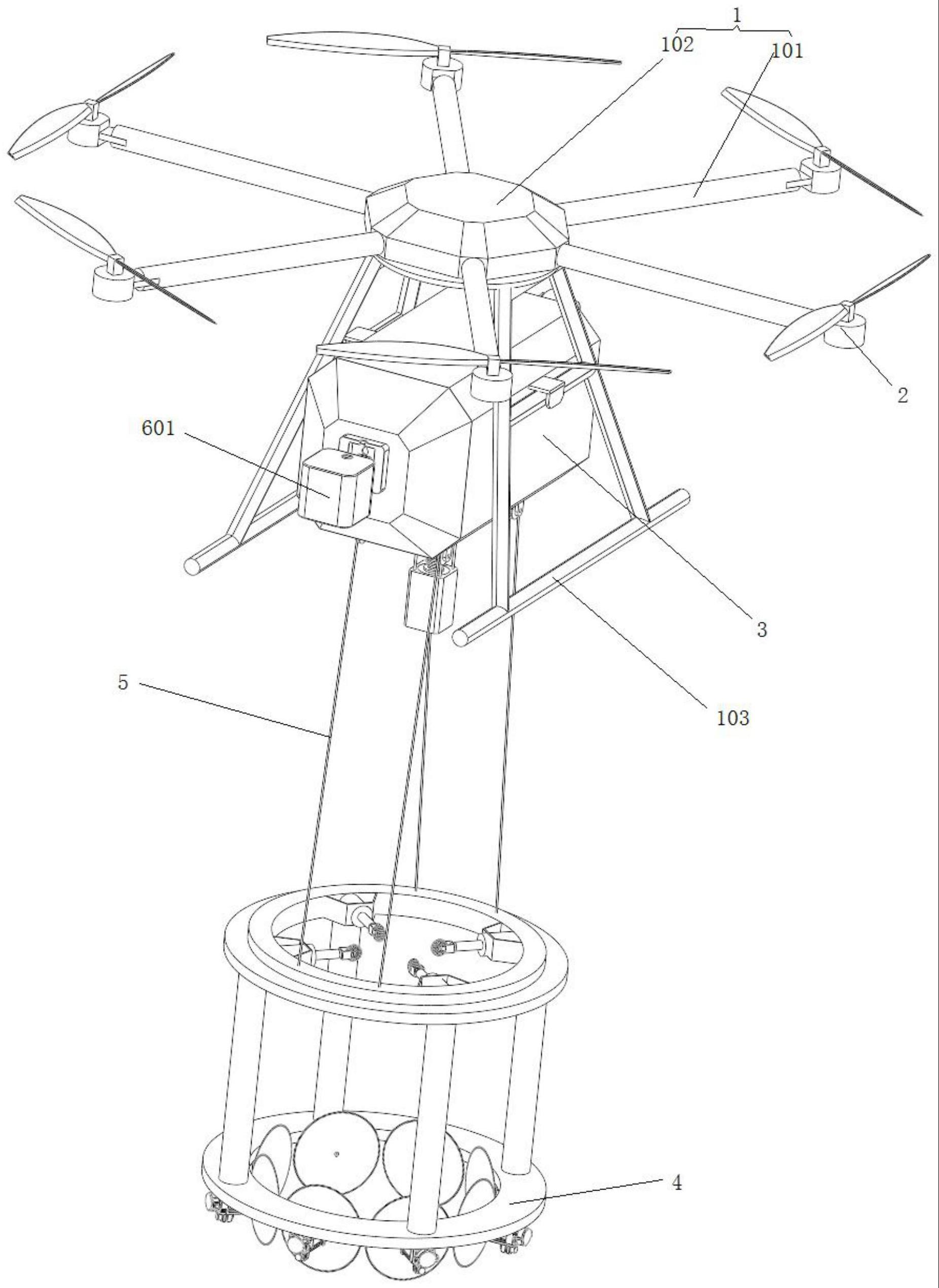
4、为实现以上目的,本发明通过以下技术方案予以实现:一种基于环形切割的松果采摘无人机,包括采摘无人机机身、若干无人机螺旋桨、智能控制主体机箱、环形切割装置、执行器高度调节装置,若干无人机螺旋桨设置在采摘无人机机身的上方,所述智能控制主体机箱安装在采摘无人机机身底部的支撑架上,所述执行器高度调节装置设置在智能控制主体机箱的下端,且用于调节环形切割装置的高度,所述环形切割装置用于采摘松果,所述智能控制主体机箱内集成有自动识别松果系统。
5、优选的,所述自动识别松果系统包括型号为baf1500-540s28hm的电源系统、型号为pixhawk的无人机飞控系统、型号为nvidiajetsontx2的松果识别定位模块、型号为stm32f407的智能控制模块、型号为sgm7g-1eafc61的执行器高度调节模块、摄像头组,所述无人机飞控系统由型号为bw-ah400c的姿态控制系统、型号为司南导航k823e模块的导航系统、型号为步科k10-plus的动力系统组成,并与无人机螺旋桨和型号为baf1500-540s28hm的电源系统相连。
6、优选的,所述采摘无人机机身包括若干螺旋桨支撑杆、无人机壳体和无人机支撑架。若干所述螺旋桨支撑杆安装于无人机壳体四周且绕其中心等角度分布,所述无人机支撑架固定于无人机壳体下侧,所述智能控制主体机箱设置在无人机支撑架上。
7、优选的,所述无人机螺旋桨包括无刷电机和螺旋桨叶片,所述螺旋桨叶片安装在无刷电机上,所述无刷电机一一安装于若干螺旋桨支撑杆上。
8、优选的,所述执行器高度调节装置包括伺服电机、绳索、绕线杆、滑轮支架和若干滑轮,所述滑轮支架、绕线杆设置在智能主体机箱的底部,若干所述滑轮转动连接于滑轮支架上,所述绳索的一端环绕于绕线杆上,另一端经过并嵌于滑轮中,且连接环形切割装置,所述伺服电机设置在智能主体机箱的底部且与绕线杆的转轴相连。
9、优选的,所述环形切割装置包括爬行抱紧机构和切割刀片组组成,爬行抱紧机构由上支撑环和四组可伸缩支撑杆、橡胶轮子组成,若干所述橡胶轮子通过可伸缩支撑杆连接于上支撑环内且绕其中心等角度分布,该环形切割装置可通过橡胶轮子在树干上转动,带动环形切割装置在树干上爬升,所述切割刀片组由下支撑环、八组直流电机和与其相连的圆形铝合金锯片组成,所述下支撑环通过连杆与上支撑环相连,八组所述直流电机设置在下支撑环上且绕其中心等角度分布。
10、优选的,所述摄像头组包括摄像头一和摄像头二,摄像头一和摄像头二分别设置在智能控制主体机箱的两侧。摄像头一的型号为索尼fcb-ev9500m,摄像头二的型号为top1035h。
11、一种基于环形切割的松果采摘无人机的采摘方法,该方法包括以下步骤:
12、步骤一,松果识别定位模块通过安装在智能控制主体机箱侧面的摄像头采集到的图像信息,识别定位其中的松树树干,并将相应的位置信息发送给无人机飞控系统;
13、步骤二,无人机飞控系统接收到位置信息后,经过计算,发送动作信号给无人机螺旋桨,使无人机移动到相应的松树树干正上方;
14、步骤三,无人机到达指定位置后,松果识别定位模块通过安装于智能控制主体机箱侧面的摄像头采集的图像信息分析得出执行器所需调节的高度,将高度调节信号传输给执行器高度调节装置,驱动伺服电机,使环形切割装置下降至能够抱紧树干;
15、步骤四,环形切割装置驱动直流电机,切断树干周围的树枝,接着启动连接在橡胶轮子的驱动电机,通过橡胶轮子的转动,让环形切割装置从上而下切割松果树枝,完成所有松果所在的树枝切割之后,停止运行直流电机并且释放爬行抱紧机构,高度调节装置将环形切割装置收回,完成松果采摘。
16、(三)有益效果
17、本发明提供了一种基于环形切割的松果采摘无人机。具备以下有益效果:
18、1、该基于环形切割的松果采摘无人机,可以通过自动识别松果系统机器视觉识别出松果、确定松果的位置信息、控制无人机飞行至指定位置、同时将高度调节信号传输给执行器高度调节装置,驱动电机,使环形切割装置下降至抱紧树干,接下来驱动直流电机,切断树干周围的树枝,接着启动连接在橡胶轮子的伺服电机,通过橡胶轮子的转动,让环形切割装置从上而下切割松果树枝,完成所有松果所在的树枝切割之后,停止运行直流电机并且释放爬行抱紧机构,高度调节装置将环形切割装置收回,完成松果采摘,该机器对松果的识别准确度高,切割速度快,对人工的依赖程度小,便于操作,提高了经济效益。
- 还没有人留言评论。精彩留言会获得点赞!