一种多功能杀虫灯系统及其杀虫方法
本发明涉及杀虫灯,特别是涉及一种多功能杀虫灯系统及其杀虫方法。
背景技术:
1、杀虫灯具是利用特定波长紫外光对昆虫具有激备较强的趋光、趋波、趋色、趋性的特性原理,确定对昆虫的诱导波长,研制专用光源,利用放电产生的低温等离子体,紫外光辐射对害虫产生的趋光兴奋效应,引诱害虫扑向灯的光源,利用杀虫灯光源外配置的高压网,杀死害虫,使害虫落下专用的接虫袋或桶内,达到灭杀害虫的目的。现有技术中的杀虫灯并未设置监测功能,无法对杀虫灯的状态进行监测,而且,现有技术中的杀虫灯仅能实现杀虫功能,无法对灭杀的害虫进行分析,以便于对未来的虫害做出相应的指导分析。另外,杀虫灯往往是应用在户外农田,而对农田来说,除了害虫造成伤害以外,鸟类也会对器造成伤害。因此,设计一种多功能杀虫灯系统及其杀虫方法是十分有必要的。
技术实现思路
1、本发明的目的是提供一种多功能杀虫灯系统及其杀虫方法,能够实现杀虫以及对杀虫灯的监测,杀虫的计数以及辅助驱鸟功能,结构简单,便于使用。
2、为实现上述目的,本发明提供了如下方案:
3、一种多功能杀虫灯系统,包括:杀虫灯固定模块、杀虫灯模块、杀虫灯监测模块、驱鸟模块、控制器及无线通信模块,所述杀虫灯固定模块上设置所述杀虫灯模块及驱鸟模块,所述杀虫灯模块上设置所述杀虫灯监测模块,所述杀虫灯固定模块、杀虫灯模块、杀虫灯监测模块及驱鸟模块电性连接所述控制器,所述控制器通过无线通信模块通信连接后台监控主机;
4、所述杀虫灯模块包括第一摄像头、杀虫灯组件、计数模块及虫类识别模块,所述杀虫灯固定模块上设置所述杀虫灯组件,所述杀虫灯组件上设置所述第一摄像头、计数模块及虫类识别模块,所述计数模块用于实现杀虫数据的统计,所述虫类识别模块用于识别虫的种类,所述第一摄像头、杀虫灯组件、计数模块及虫类识别模块电性连接所述控制器;
5、所述杀虫灯监测模块为光照传感器,所述杀虫灯组件的内部设置所述光照传感器,用于检测杀虫灯组件的运行,所述光照传感器电性连接所述控制器;
6、所述驱鸟模块包括第二摄像头、红外识别模块、鸟类识别模块、超声波驱鸟器及声音驱鸟器,所述杀虫灯固定模块上设置所述第二摄像头、红外识别模块、鸟类识别模块、超声波驱鸟器及声音驱鸟器,所述鸟类识别模块用于对鸟类进行识别,所述第二摄像头、红外识别模块、鸟类识别模块、超声波驱鸟器及声音驱鸟器电性连接所述控制器。
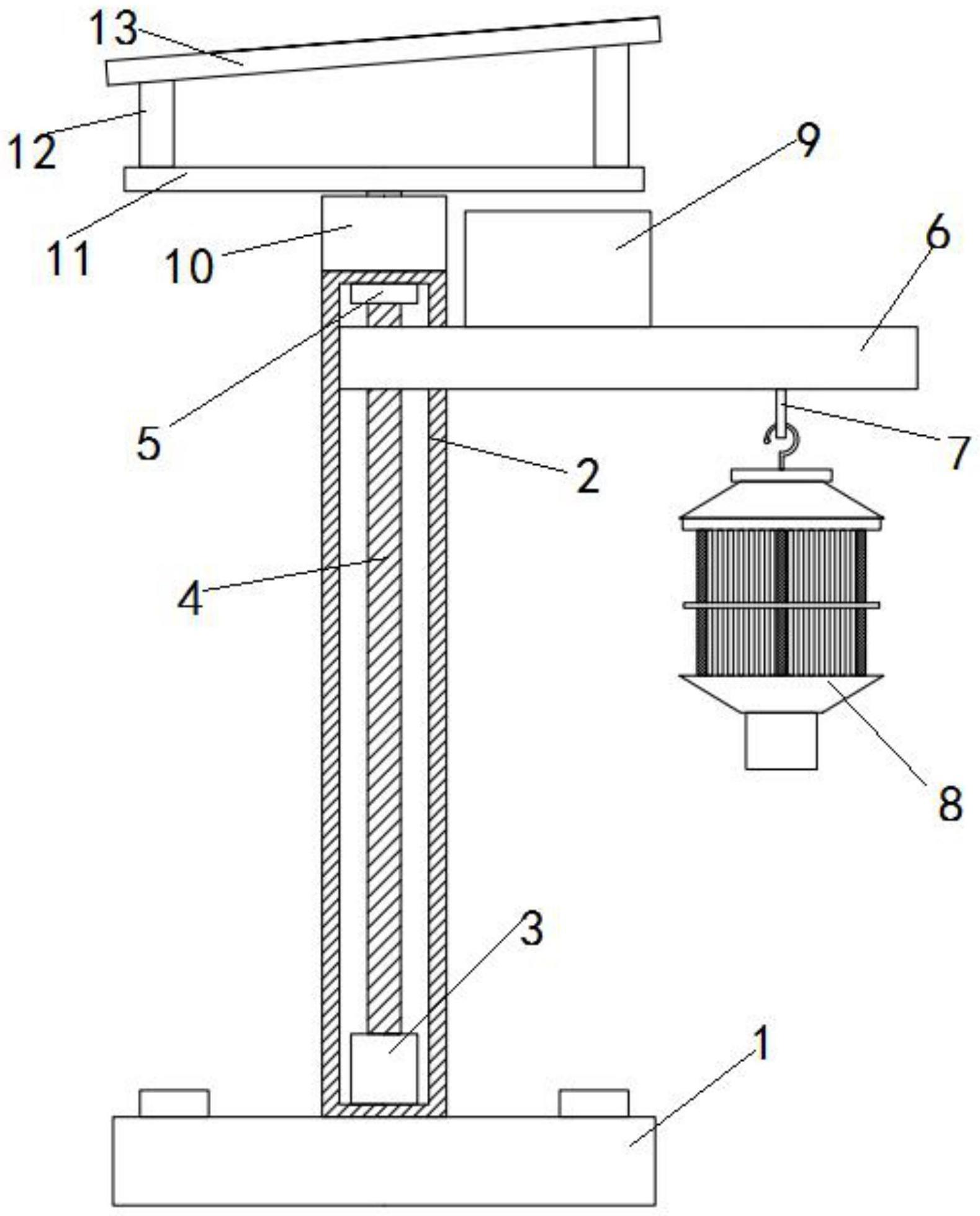
7、可选的,所述杀虫灯固定模块包括固定底座、保护外壳、第一旋转电机、第一转动件、第一螺纹杆及安装杆,所述固定底座的顶部固定设置所述保护外壳,所述保护外壳的内底部固定设置所述第一旋转电机,所述保护外壳的内顶部设置所述第一转动件,所述第一旋转电机的输出端与所述第一转动件之间设置所述第一螺纹杆,所述第一螺纹杆上螺纹连接所述安装杆的一侧,所述保护外壳的一侧对应所述安装杆设置有滑槽,所述安装杆的另一侧底部设置有安装件,通过所述安装件设置所述杀虫灯组件,所述安装杆的顶部设置有控制箱,所述红外识别模块及第二摄像头设置在所述控制箱的外部,所述鸟类识别模块、超声波驱鸟器、声音驱鸟器、控制器及无线通信模块设置在所述控制箱的内部,所述第一旋转电机电性连接所述控制器。
8、可选的,所述杀虫灯组件包括顶部壳体、底部壳体、高压网、第二螺纹杆、第二旋转电机、主动齿轮、从动齿轮、圆环、灯柱及收集桶,所述顶部壳体的内顶部设置所述第二旋转电机,所述第二旋转电机的底部输出端固定连接所述主动齿轮,所述顶部壳体的内底部对应所述主动齿轮设置多个从动齿轮,且所述从动齿轮与所述主动齿轮啮合连接,所述从动齿轮的底部固定连接所述第二螺纹杆的一端,所述底部壳体的内部对应所述第二螺纹杆设置第二转动件,所述第二螺纹杆的另一端穿过所述顶部壳体的底部与底部壳体的顶部与所述第二转动件转动连接,所述顶部壳体的外底部中心固定设置所述灯柱,所述灯柱的外侧固定设置所述高压网,所述高压网的顶部连接所述顶部壳体的外底部,所述高压网的底部连接所述底部壳体的外顶部,所述第二螺纹杆上螺纹连接所述圆环,且所述圆环的内部对应所述高压网设置有多个滑孔,所述圆环通过所述滑孔与所述高压网滑动连接,所述底部壳体设置有通孔,所述通孔的底部设置所述收集桶,所述顶部壳体的外底部设置所述计数模块及光照传感器,所述顶部壳体的内部设置所述虫类识别模块,所述顶部壳体的顶部设置有挂钩及第一摄像头,通过所述挂钩将所述杀虫灯组件设置在所述安装件上,所述第二旋转电机及高压网电性连接所述控制器。
9、可选的,所述多功能杀虫灯系统还包括太阳能供电模块,所述太阳能供电模块包括旋转壳体、第三旋转电机、固定板、固定柱、太阳能电池板、电能转换模块及蓄电池,所述保护外壳的顶部固定设置所述旋转壳体,所述旋转壳体的内底部固定设置所述第三旋转电机,所述第三旋转电机的顶部输出端穿过所述旋转壳体固定连接所述固定板,所述固定板的顶部设置所述固定柱,所述固定柱的顶部设置所述太阳能电池板,所述太阳能电池板通过电能转换模块连接所述蓄电池,用于给蓄电池充电,所述蓄电池及电能转换模块设置在所述控制箱的内部,所述蓄电池用于给各模块供电。
10、本发明还提供了一种多功能杀虫灯系统杀虫方法,应用于上述的多功能杀虫灯系统,包括如下步骤:
11、步骤1:将杀虫灯固定模块固定在指定位置,将杀虫灯模块设置在杀虫灯固定模块上,并将其电性连接;
12、步骤2:杀虫灯模块实时开启,通过第一摄像头及虫类识别模块相配合,实现杀虫灯附近的虫类识别,通过杀虫灯组件杀死虫类,通过计数模块进行计数,并将获取的所有结果发送至控制器;
13、步骤3:通过红外识别模块判断是否有鸟类进入监测区域内,若没有,则不做处理,若有,则通过鸟类识别模块对鸟类进行识别,根据识别的类型通过超声波驱鸟器及声音驱鸟器对鸟类进行驱逐。
14、可选的,步骤2中,杀虫灯模块实时开启,通过第一摄像头及虫类识别模块相配合,实现杀虫灯附近的虫类识别,通过杀虫灯组件杀死虫类,通过计数模块进行计数,并将获取的所有结果发送至控制器,具体包括如下步骤:
15、步骤201:设置时间间隔,每隔固定时间,控制器控制第一摄像头对监测区域进行图像采集,得到虫类识别图像;
16、步骤202:虫类识别模块搭建虫类识别模块及虫类识别数据集,通过虫类识别数据集对虫类识别模型进行训练,得到训练后的虫类识别模型;
17、步骤203:将虫类识别图像输入虫类识别模型,得到虫类类型,并将其发送至控制器,控制器将其通过无线通信模块发送至后台监控主机,后台监控主机对其进行保存处理;
18、步骤204:计数模块实时采集高压网的电压值,并判断连接采集的三个电压值的大小,若三个电压值中的中间电压值小于与其相邻的两个电压值,且大于或等于预设阈值,则计数模块计数一次,记为放电次数,将放电次数与预设的杀虫数目与放电次数的系数相乘,得到杀虫数目,并将其发送至控制器,控制器将其通过无线通信模块发送至后台监控主机,后台监控主机对其进行保存处理。
19、可选的,步骤3中,通过红外识别模块判断是否有鸟类进入监测区域内,若没有,则不做处理,若有,则通过鸟类识别模块对鸟类进行识别,根据识别的类型通过超声波驱鸟器及声音驱鸟器对鸟类进行驱逐,具体包括如下步骤:
20、步骤301:红外识别模块实时对监测区域进行监测,并将红外监测图像发送至控制器,控制器根据红外监测图像判断是否有鸟类进入监测区域,若没有则不做处理;
21、步骤302:若有,则控制器控制第二摄像头开启,对鸟类进行图像采集,得到鸟类识别图像;
22、步骤303:鸟类识别模块搭建鸟类识别模型,并对预设的鸟类图像数据集进行预处理,通过处理后的鸟类图像数据集对鸟类识别模型进行训练,得到训练后的鸟类识别模型;
23、步骤304:将鸟类识别图像输入鸟类识别模型,输出得到鸟类的种类,并将其发送至控制器;
24、步骤305:控制器根据鸟类的种类通过声音驱鸟器播放该种类鸟类的天敌的叫声,通过超声波驱鸟器发出与该种类鸟类相匹配的超声波,进行驱鸟。
25、根据本发明提供的具体实施例,本发明公开了以下技术效果:本发明提供的多功能杀虫灯系统及其杀虫方法,该系统包括杀虫灯固定模块、杀虫灯模块、杀虫灯监测模块、驱鸟模块、控制器及无线通信模块,其中,通过杀虫灯固定模块能够对杀虫灯模块的高度进行调节,通过杀虫灯监测模块能够对杀虫灯的状态进行检测,通过驱鸟模块能够实现辅助驱鸟功能;该方法包括将杀虫灯固定模块固定在指定位置,将杀虫灯模块设置在杀虫灯固定模块上,并将其电性连接,杀虫灯模块实时开启,通过第一摄像头及虫类识别模块相配合,实现杀虫灯附近的虫类识别,通过杀虫灯组件杀死虫类,通过计数模块进行计数,并将获取的所有结果发送至控制器,通过红外识别模块判断是否有鸟类进入监测区域内,若没有,则不做处理,若有,则通过鸟类识别模块对鸟类进行识别,根据识别的类型通过超声波驱鸟器及声音驱鸟器对鸟类进行驱逐,便于使用,能够实现虫类识别,便于通过统计计算害虫爆发规模等相关信息,能够实现驱鸟,根据不同鸟类采用不同频率的超声波,提高了驱逐效率,能够对杀虫数量进行统计,便于后续的数据应用。
- 还没有人留言评论。精彩留言会获得点赞!