直动有缆式森林病虫害治理机器人
本发明涉及树木病虫害治理领域,特别是一种直动有缆式森林病虫害治理机器人。
背景技术:
1、对生态环境保护工作而言,森林资源的作用极为重要,作为“地球之肺”,不仅具有净化空气、涵养水源的功能,还可以起到调节径流等作用。森林病虫害又被称作“无烟的森林火灾”,它对森林生态产生极大的破坏作用,具有潜伏期长、来势猛、发展快、危害重、损失大等特点。
2、目前森林病虫害的治理方法主要采用人工治理法、喷洒药剂法、生物诱虫法等。其中人工治理法需要大量的劳动力,效率较低,同时会对操作人员造成农药伤害。喷洒药剂法通过过饱和喷洒化学药剂的方式,虽然能够取得较好的治理效果,但是会导致药剂使用效率低,对环境造成附加生态危害的问题。生物诱虫法往往针对性不强,对于深入在树干中的害虫常常束手无策。
技术实现思路
1、本发明的目的在于克服现有技术存在的上述缺陷,提出了一种直动有缆式森林病虫害治理机器人,其实现了对树木病虫害的自动检测及治理,体积小,工作成本低,可广泛应用于森林的病虫害治理。
2、本发明的技术方案是:一种直动有缆式森林病虫害治理机器人,其特征在于,包括
3、运动模块;
4、扎针模块;
5、对接模块,包括夹爪、对接扣和直动底座,直动底座位于夹爪的下方,对接扣固定在攀爬模块的外侧,对接扣被夹紧固定在夹爪内,夹爪与摆动机构连接;
6、攀爬模块,位于对接模块的内侧,包括两个对称设置的竖向支撑架、以及与竖向支撑架滑动连接的上抱紧装置和下抱紧装置,上抱紧装置上设有喷药机构,上抱紧装置和下抱紧装置之间通过第二丝杠机构连接,上抱紧装置和下抱紧装置均包括两个对称设置的v形抱件,v形抱件对应的自由端之间通过夹紧机构连接。
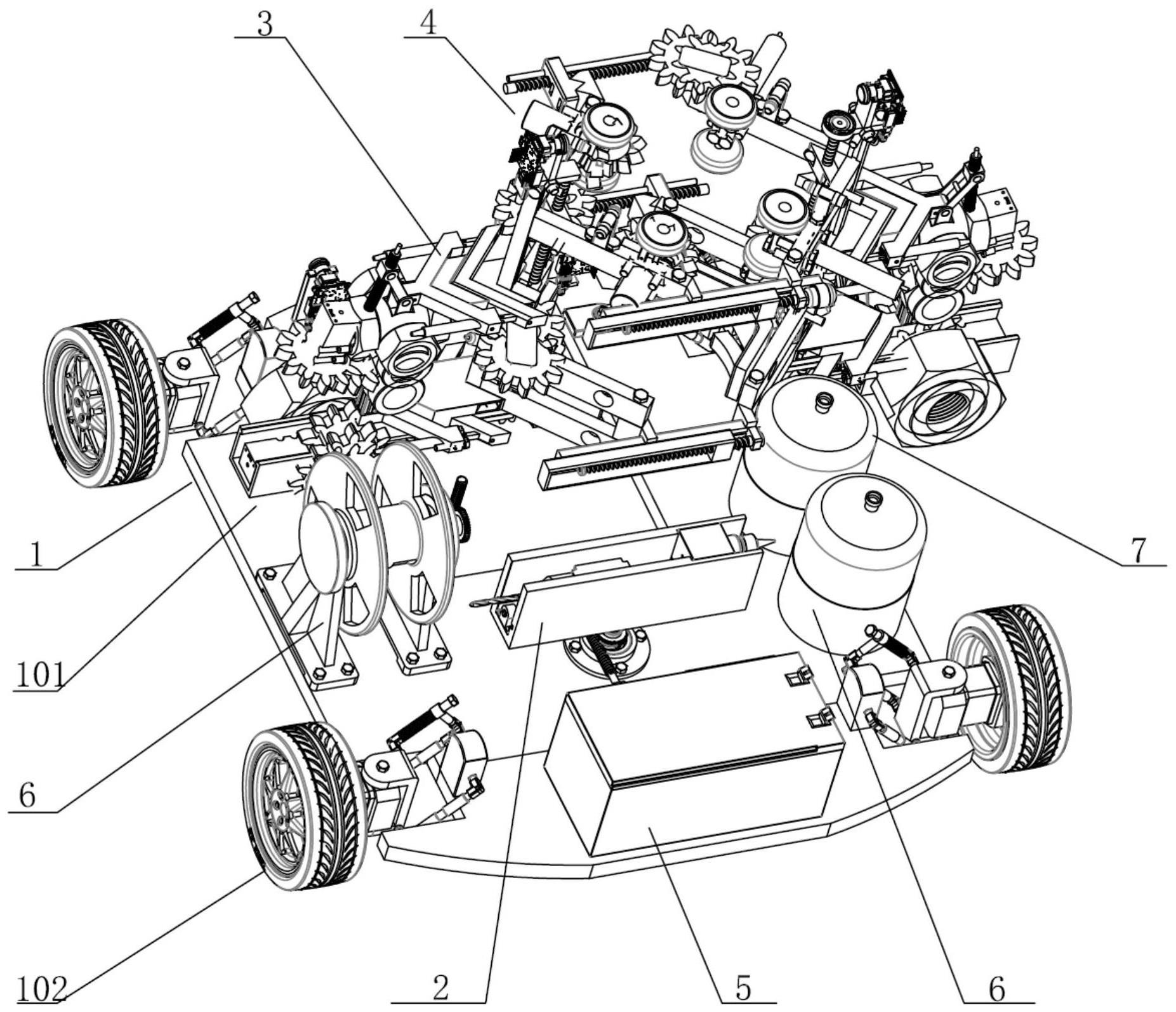
7、本发明中,所述扎针模块、对接模块设置在运动模块上,扎针模块与运动模块之间转动连接,对接模块与运动模块之间滑动连接;
8、所述运动模块包括运动车体,运动车体的中部设有凹槽,对接模块、攀爬模块均位分布于凹槽的两侧且呈对称设置,竖向支撑架位于凹槽的两侧;
9、所述运动车体上设有储气罐和储药罐,储气罐和储药罐分别通过缆线与攀爬模块连接。
10、所述上抱紧装置包括两个对称设置的上v形抱件,上v形抱件包括两根位于同一水平面且互成角度的上抱杆,两上抱杆之间通过上连接块固定连接,上抱杆的一端与支撑架滑动连接,上抱杆的另一端与同侧相邻的上抱杆的自由端之间通过夹紧机构连接,上抱杆的顶部表面分别设有喷药机构;
11、所述下抱紧装置包括两个对称设置的下v形抱件,下v形抱件包括两根位于同一水平面的互成角度的下抱杆,两下抱杆之间通过下连接块固定连接,下抱杆的一端与支撑架滑动连接,下抱杆的另一端与同侧相邻的下抱杆的自由端之间通过夹紧机构连接;
12、上连接块和下连接块之间通过第二丝杠机构连接。
13、所述夹紧机构包括
14、两个连接板,分别与同侧相邻两上抱杆和/或下抱杆的自由端固定连接;
15、丝杠ⅰ,其一端与其中的一个连接板固定连接,另一端与另一个连接板螺纹连接;
16、限位板,位于其中一个连接板的外侧,限位板和连接板的相对面上分别设有定位凸起和定位凹槽。
17、第二丝杠机构包括第二丝杠,第二丝杠的顶端与支撑架顶端的连接板转动连接,第二丝杠的底端与下连接块转动连接,第二丝杠的中部与上连接块螺纹连接。
18、所述一侧上v形抱件的内侧设有主动滚轮机构,另一侧上v形抱件的内侧设有被动滚轮机构;
19、主动滚轮机构包括主动轴、以及固定在主动轴上下两端的主动滚轮,主动轴与电机传动连接;
20、被动滚轮机构包括连接轴、以及与连接轴上下两端转动连接的被动滚轮,连接轴与推动气缸连接。
21、所述两下v形抱件的内侧分别设有环抱板,环抱板与向斜下方倾斜设置的气缸连接。
22、所述夹爪包括两个v形对接板,两v形对接板之间存在间隙,对接扣位于该间隙中,两v形对接板之间通过伸缩气缸连接;
23、所述竖向支撑架的中部和下部的外侧分别固定有对接扣,中部的对接扣与上夹爪连接,下部的对接扣与上夹爪连接;
24、上夹爪和下夹爪之间通过竖向连杆连接,上夹爪与竖向连杆的顶部转动连接,下夹爪与竖向连杆的底部固定连接;
25、直动底座位于下夹爪的下方,直动底座与下夹爪之间滑动连接,直动底座朝向树干的一侧设有对接块,直动底座与运动车体之间滑动连接;
26、上夹爪与摆动机构连接。
27、所述摆动机构包括丝杠ⅱ和第一连杆;
28、第一连杆的一端与丝杠ⅱ之间螺纹连接,第一连杆的另一端与上夹爪固定连接,且与竖向连杆的顶部转动连接。
29、所述扎针模块包括
30、转台,包括转轴和支撑托架;
31、钻孔机构,包括钻头、钻进电机和钻孔支架,钻头和钻进电机的输出轴连接,钻进电机设置在钻孔支架上;
32、样品供给机构,包括营养液药瓶容纳仓;
33、丝杠ⅲ,钻孔支架和营养液药瓶容纳仓分别位于丝杠ⅲ的两端,钻孔支架和营养液药瓶容纳仓分别与丝杠ⅲ之间螺纹连接。
34、本发明的有益效果是:
35、(1)采用了攀爬模块与运动车体可分离的结构设计,通过包含气管、液管、电线的缆管连接:上下可分离的设计能够保证攀爬模块始终倚靠在树木表面,保证攀爬模块的稳定性;同时解除了上树高度的限制,可以处理树干上端的虫洞;另外通过缆管连接的方式,上下通过缆管建立传输轨道,可以将电池、药罐、气罐等较重物品置于车体基座上,有效减少了攀爬模块的质量,减少无用功;
36、(2)通过对接模块,实现了机器人与攀爬模块之间的连接及分离,同时对接模块还可以矫正攀爬模块微小的角度偏差,对接模块可以有效保证对接强度。
37、(3)无论是同一棵树,还是不同的树,都无法保证树木直径完全相同。本技术中攀爬模块的夹紧机构可以在一定范围内任意调节攀爬模块的内径大小,能够在适应树木直径变化的同时保证上树运动的稳定性。此外,夹紧机构还可以起到机械夹紧的作用,当整机突然出现意外情况时,夹紧机构产生的机械夹紧力可以使攀爬模块能够紧紧贴合在树木上,避免高空掉落等危险情况发生;
38、(3)上抱紧装置的两侧分别设有主动滚轮机构和被动滚轮机构,当攀爬模块的上端需要夹紧时,被动滚轮机构中的两被动滚轮被向内推动,从而使主动滚轮机构中的两主动滚轮将位于树干的对称外侧,在两主动滚轮的导向下,整个机器相对树木实现居中抱紧,达到避免倾覆的作用;同时主动滚轮还可以使攀爬模块沿树干的周向转动;
39、(4)扎针模块采用转台式结构,将钻头钻孔和扎营养液药瓶对应的两个机构呈180度放置在转台上,通过转台旋转先后对树木进行钻孔与扎针操作。一方面可以保证钻孔与扎药瓶工作行程精确重合,另一方面也节省了机器人的内部空间。
40、(5)该机器人可以准确判断树干的病虫害情况,并根据虫害信息对症下药,可以有效应对现实生活中树木虫害种类多样的情况,提高了机器人的实用性。
- 还没有人留言评论。精彩留言会获得点赞!