一种可伸缩变幅宽的除草机器人
本发明属于农业机械,具体涉及一种可伸缩变幅宽的除草机器人。
背景技术:
1、除草是农耕过程中的一个必经步骤,目前的除草手段一般分为药物毒杀、人工拔草和除草机除草三种方式,药物毒杀副作用非常巨大,残留的药物直接污染泥土和其上种植的农作物,人工拔草需要人力一根根拔起,工作强较大,不适合大面积使用,因此除草机除草是最适合的一种方法。
2、现有的除草设备,如专利cn112602389b公开的一种农业用便携式除草设备及除草方法,该设备可用于对农田面积较小的土地进行除草,可用于已经种植的田地,且能够边除草、边收集剪断的杂草,可对生长在蔬菜间的杂草进行修剪。同时,专利cn208597246u中所公开的一种除草机构及除草设备,该设备能够提高除草效率并能除尽杂草。
3、但是,在果园种植时,果园的陇上以及陇间会有多种杂草生成,一般情况下是人为清除杂草。相比于田间的种植面积小,果园种植面积要大很多,现有的除草设备很难实现变幅宽除草,如果仅依靠人工除草,这项工作耗费大量人力物力,因此需要设计一种可伸缩变幅宽除草机器人来辅助果园除草工作。
4、目前国内外割草机械发展速度迅猛,但在农业中割草机械用途多为牧草收获,草坪修理,多为人工推动前进,不具备自主走行能力。这些割草机用于果园和垄地除草时存在以下问题:
5、1.果园和垄地地形复杂,需要除草机在自主行走中其除草单元能升降起伏适应地形;
6、2.果园和垄地中经济作物种植的幅宽变化范围较大,需要除草机的除草单元能够变幅宽;
7、3.果园种植乔木型树木时期望除草机在自主行走中其除草单元自主避障。
技术实现思路
1、本发明的目的在于降低果园除草的人工成本。实现快速、精准和适应多种行宽的除草,提高除草率。
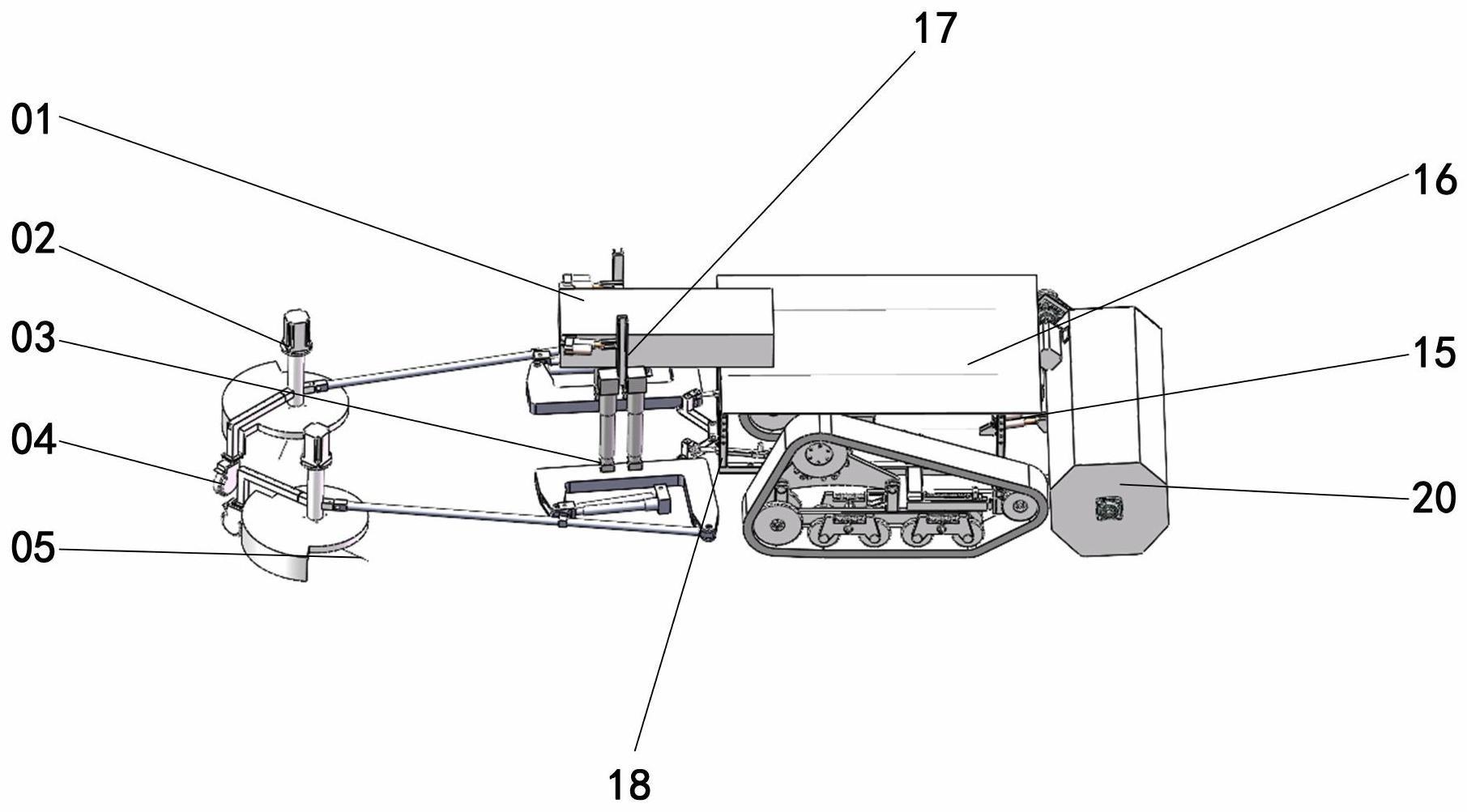
2、为达到上述技术目的,本发明的技术方案提供一种可伸缩变幅宽的除草机器人,包括驱动车体和分别设置在驱动车体前端和后端的割草装置,前端的割草装置为甩刀式割草头,所述甩刀式割草头可在竖直面内旋转割草,并通过调节组件控制甩刀式割草头高度位置,从而调节割草深度;后端的割草装置包括一对对称设置在驱动车体后端两侧的具有伸缩功能的两翼变幅宽的割草装置,所述变幅宽的割草装置包括纵向伸缩组件、横向伸缩组件和割草刀盘;所述横向伸缩组件调整割草刀盘的相对于驱动车体的水平位置,使得一对割草刀盘能同时相互远离或靠近,从而能切割不同幅宽的杂草,或同时靠近收回至驱动车体后端;所述纵向伸缩组件调整割草刀盘的相对于驱动车体的纵向高度,使得割草刀盘能切割不同深度的杂草或离开地面。
3、进一步的,所述驱动车体包括被构造成镂空的长方体框形的架体,架体的两侧边对称设有履带,所述甩刀式割草头设置在架体的前端,架体上部设有顶板,所述连接块居中设置在顶板的后端,且连接块的端部伸出在顶板之外,在连接块两侧边对称装有具有伸缩功能的两翼变幅宽绳式割草装置;所述架体内设置有适用于锂电池驱动的传动组件,传动组件可以驱动履带行驶。
4、进一步的,所述甩刀式割草头包括割草头刀,所述割草头刀水平设置并在竖直面内旋转割草,所述割草头刀外部套设有保护罩,所述调节组件包括电动推杆,电动推杆的末端固定安装在驱动车体的前端,电动推杆的伸长端与保护罩连接,通过所述电动推杆的伸缩可以调节甩刀式割草头的割草深度;所述割草头刀的转轴被电机的输出轴驱动;所述割草头刀外部套设有保护罩。
5、进一步的,所述纵向伸缩组件包括竖向电动推杆,所述竖向电动推杆的顶端通过连接条竖直安装在驱动车体后端的连接块的左右侧边,所述横向伸缩组件包括水平设置的横杆和分别能在横杆两端水平转动的长支杆和二折撑杆,所述割草刀盘的上部与长支杆的另一端通过铰链转动相连,所述铰链的转动轴水平布置,二折撑杆的另一端与长支杆的中部转动连接,且能水平转动,竖向电动推杆伸长杆的下端固定安装有平行于驱动车体纵向的横杆,横杆被构造成牛角形,连接块左右两侧两横杆的牛角朝向相互背离,牛角之间可以容纳折叠的二折撑杆,两横杆中的长支杆相互靠近时,所述割草刀盘远离驱动车体,所述割草刀盘侧面安装有滑轮。
6、进一步的,所述二折撑杆与横杆通过可转动的转动机构连接,转动机构由电机驱动。
7、进一步的,所述二折撑杆包括长度固定的横向电动摆杆和可伸缩的连接杆,横向电动摆杆通过可转动的转动机构连接,连接杆内设有弹性体,驱动连接伸长。
8、进一步的,所述割草刀盘包括刀盘保护罩和割草绳,刀盘保护罩被构造成包括圆形顶板和连接在圆形顶板圆周的一段弧形侧板,圆形顶板中心开孔且设置朝上的同心轴套,电机竖直安装在轴套上端,电机的输出轴穿过轴套后与割草绳连接,使得割草绳在电机的驱动下在刀盘保护罩的弧形侧板内旋转,刀盘保护罩的弧形侧板与长支杆相远离,l型架设置在刀盘保护罩具有弧形侧板的一边,l型架的长臂与轴套连接,l型架的短臂底部安装滑轮,且l型架的短臂长度大于刀盘保护罩的弧形侧板的高度,使得滑轮可以支撑起刀盘保护罩。
9、进一步的,所述驱动车体包括被构造成镂空的长方体框形的架体,架体的两侧边对称设有履带,所述甩刀式割草头设置在架体的前端,架体上部设有顶板,所述连接块居中设置在顶板的后端,且连接块的端部伸出在顶板之外,在连接块两侧边对称装有具有伸缩功能的两翼变幅宽绳式割草装置;所述架体内设置有适用于锂电池驱动的传动组件,传动组件可以驱动履带行驶。
10、进一步的,本发明还提供了一种基于可伸缩变幅宽除草机器人的除草方法,包括以下步骤:
11、步骤1.移动所述可伸缩变幅宽除草机器人至除草区域,竖向电动推杆向下缓慢伸张,驱动车体后端的变幅宽的割草装置可下降至地面,电机驱动二折撑杆转动,使变幅宽的割草装置向外缓慢展开,驱动车体前端的电动推杆将前端甩刀式割草头缓慢放下,进入工作状态;
12、步骤2.根据工作地形与工作环境要求,可调节驱动车体后端的两翼变幅宽除草装置的展开长度,以适应工作地形,调节驱动车体前端的电动推杆的伸出长度,调节驱动车体后端竖向电动推杆伸展的长度,以达到所需的割草留茬高度;
13、步骤3.启动履带的运动底盘,通过甩刀式割草头的电机驱动甩刀式割草头刀进行竖直面的旋转割草,通过具有伸缩功能的两翼变幅宽的割草装置的电机驱动割草刀盘进行水平面的旋转割草,除草机器人在工作环境中通过履带向前方移动,进行一片区域的割草工作;
14、步骤4.除草完毕后,将前端甩刀式割草头,通过电动推杆抬起,将后端变幅宽的割草装置,通过二折撑杆实现两翼变幅宽的割草装置的收缩,并通过竖向电动推杆抬起,至一对割草刀盘收缩靠拢至驱动车体后端,驱动车体从割草状态进入高速行走状态,快速驶离工作环境。
15、相比于现有技术,本发明的有益效果为:
16、该除草机器人在驱动车体后端巧妙设置了一对具有伸缩功能的两翼变幅宽的割草装置,该割草装置借助不同的伸缩组件来调节其高度位置和水平位置,割草装置在水平位置的调控,一方面可以实现割草幅宽的控制,另一方面可以将割草装置收回靠拢至驱动车体,避免了车体形状过于宽不便于穿过障碍物;割草装置在高度位置的调控,可以实现割草深度的控制,还能避免车体在非工作状态下,割草装置与地面过多摩擦接触,引起设备损坏或对非杂草的损坏。因此,该除草机器人能实现快速、精准和适应多种行宽的除草,提高除草效率。
- 还没有人留言评论。精彩留言会获得点赞!