一种马铃薯自适应捡拾方法及装置与流程
本发明涉及农业机械装备领域,特别是一种适用于自走式马铃薯捡拾机的马铃薯自适应捡拾方法及装置。
背景技术:
1、现有技术马铃薯机械化收获大部分采用分段收获的方式,其中在分段收获中的马铃薯捡拾环节,目前依靠人工进行捡拾,劳动强度大,费时费力。并且随着近年来农村人口老龄化现象的加剧,劳动力成本不断升高,用工难等问题日益突出,马铃薯捡拾环节成了马铃薯收获的瓶颈环节。因此,迫切需要解决马铃薯生产捡拾收获关键环节机械化问题。马铃薯捡拾装置的研制与推广应用成了马铃薯机械化收获发展的必然趋势。
2、当前的几种马铃薯捡拾装置在实际田间作业过程中,均存在捡拾装置前端的壅土问题,造成机器经常停机后重新调整捡拾装置入土深度等参数;同时,机手操作次数频繁、操作难度大。上述现象不仅影响整机作业效率,也造成发动机输出时,无用功的浪费。根本原因在于人工调节捡拾装置入土深度很难适应实际的作业工况,人工调节的反应时间加上液压机构的执行时间造成捡拾装置工作参数控制的严重滞后。
技术实现思路
1、本发明所要解决的技术问题是针对现有技术的上述缺陷,提供一种马铃薯自适应捡拾方法及装置。
2、为了实现上述目的,本发明提供了一种马铃薯自适应捡拾方法,适用于自走式马铃薯捡拾机,其中,包括如下步骤:
3、s100、将马铃薯自适应捡拾装置挂接于所述自走式马铃薯捡拾机后,所述自走式马铃薯捡拾机挖掘并平铺马铃薯及土秧混合物于地表;
4、s200、位于所述马铃薯自适应捡拾装置前方两侧的切土圆盘对马铃薯土垄切块;
5、s300、所述马铃薯自适应捡拾装置的捡拾机构铲起并输送马铃薯及土秧混合物,输送过程中所述马铃薯自适应捡拾装置的抖动调节机构振动形成输送链整体的起伏运动,加快马铃薯及土秧混合物的分离;以及
6、s400、马铃薯及土秧混合物运动到后段时,所述捡拾机构缩紧分散距离;所述马铃薯自适应捡拾装置的除秧机构分离除秧,得到并收集清洁的马铃薯薯块;
7、其中,所述马铃薯自适应捡拾装置采用超声波传感器对前方壅土高度进行测量,实时监测壅土高度并传入控制器中,以实时控制所述马铃薯自适应捡拾装置的挂接油缸、抖动调节机构的抖动调节油缸的伸长量及传动机构的液压马达的转速,实现所述捡拾机构的捡拾铲入土深度、薯土分离振动幅度及输送链速度的自动调节。
8、上述的马铃薯自适应捡拾方法,其中,所述马铃薯自适应捡拾装置上还设置有温度传感器测量实时环境温度,以避免环境温度对超声波速度的影响。
9、上述的马铃薯自适应捡拾方法,其中,对所述超声波传感器的测量数据进行数字滤波处理,当第一超声波传感器测得的壅土距离h1与第二超声波传感器测得的壅土距离h2之间的差值大于设定值时,则放弃本次测量数据,用上次测量数据代替;且当所述第一超声波传感器或第二超声波传感器的本次测量数据与上次测量数据的差值大于所述设定值时,放弃本次测量数据,用上次测量数据代替。
10、上述的马铃薯自适应捡拾方法,其中,所述控制器判断壅土高度是否在设定最小值和设定最大值之间,若所述壅土高度小于所述设定最小值,则所述控制器不输出指令信号;若所述壅土高度大于所述设定最大值,所述控制器输出壅土高度非正常信号,并控制壅土异常指示灯交替闪烁;若所述壅土高度在所述设定最小值到设定最大值之间时,所述控制器根据滤波后的壅土高度值按照设定的pwm占空比,分别输出信号给对应的比例电磁阀以改变所述挂接油缸、抖动调节油缸的伸长量及所述液压马达的转速。
11、上述的马铃薯自适应捡拾方法,其中,所述比例电磁阀包括第一比例电磁阀、第二比例电磁阀和第三比例电磁阀,所述第一比例电磁阀控制所述挂接油缸的伸长量以改变捡拾铲的入土深度;所述第二比例电磁阀控制所述液压马达的转速以改变输送链的输送线速度;所述第三比例电磁阀控制所述抖动调节油缸的伸长量以改变抖动调节机构的振动幅度。
12、上述的马铃薯自适应捡拾方法,其中,当壅土高度测量值大于预设值时,所述控制器调节所述pwm占空比,减小所述第一比例电磁阀的开度,减小所述挂接油缸的伸长量以减小所述捡拾铲的入土深度;增加所述第二比例电磁阀开度,提高所述液压马达的转速以提高所述输送链的输送线速度;增加所述第三比例电磁阀开度,增大所述抖动调节油缸的伸长量以增大所述抖动调节机构的振动幅度;当壅土高度测量值小于所述预设值时,所述控制器调节所述pwm占空比,增加所述第一比例电磁阀的开度,增大所述挂接油缸的伸长量以增大所述捡拾铲的入土深度;减小所述第二比例电磁阀的开度,降低所述液压马达的转速以降低所述输送链的输送线速度;减小所述第三比例电磁阀的开度,减小所述抖动调节油缸的伸长量以减小所述抖动调节机构的振动幅度。
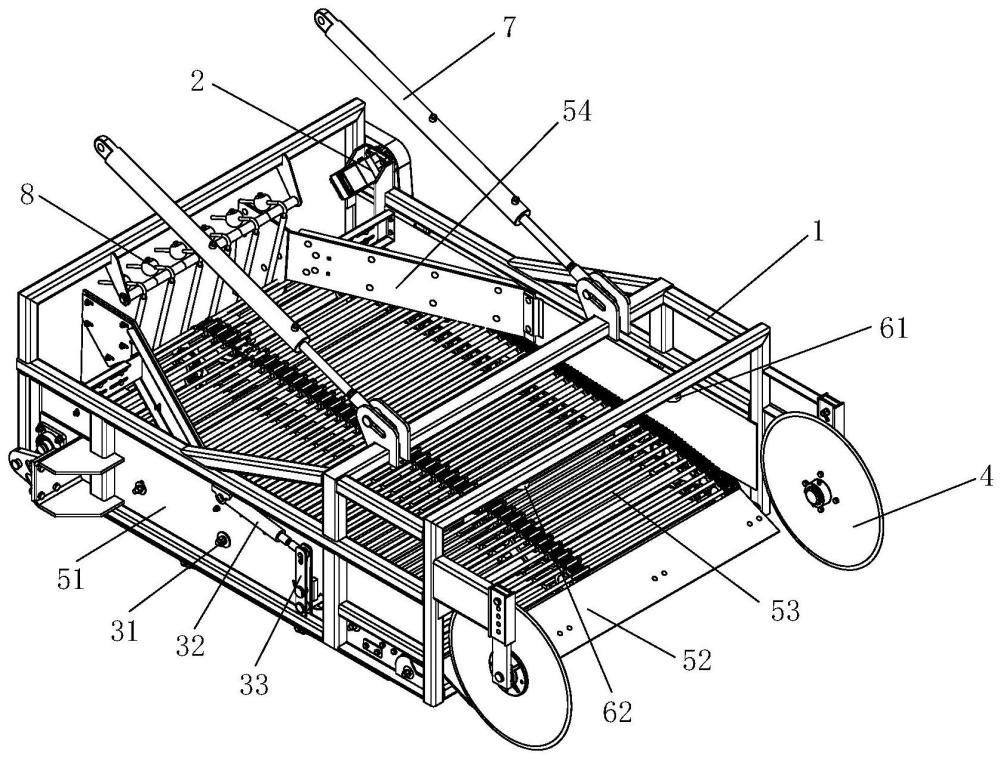
13、为了更好地实现上述目的,本发明还提供了一种自适应捡拾装置,安装在自走式马铃薯捡拾机上,其中,包括:
14、机架;
15、捡拾机构,包括侧板、捡拾铲和输送链,所述捡拾铲安装在所述机架的前端,所述输送链设置在所述捡拾铲的后方;所述侧板安装在所述机架上并设置在所述输送链的两侧;
16、传动机构,安装在所述机架上,并与所述输送链连接;
17、抖动调节机构,对应设置于所述输送链的中部;
18、挂接油缸,一端与所述机架连接,所述挂接油缸的另一端与自走式马铃薯捡拾机的主机架连接;所述控制器与所述挂接油缸连接,并通过第一比例电磁阀控制所述挂接油缸的伸长量调整所述捡拾铲的入土深度;以及
19、控制机构,包括控制器和超声波传感器,所述超声波传感器安装在所述机架前部上方,并与所述控制器连接;所述控制器分别与所述抖动调节机构和传动机构连接;
20、其中,所述传动机构包括:
21、液压马达,安装在所述机架上;
22、传动轴,两端分别通过轴承安装在所述机架上,并通过链传动机构与所述液压马达连接;
23、梅花轮,安装在所述传动轴上,并与所述输送链连接;
24、所述控制器通过第二比例电磁阀控制所述液压马达的转速调节所述输送链的输送速度;
25、所述抖动调节机构包括:
26、抖动轴,两端分别与大摆臂和小摆臂连接,所述大摆臂和小摆臂的转动中心处与所述侧板连接;
27、托轮,安装在所述抖动轴上;以及
28、抖动调节油缸,一端与所述大摆臂连接,所述抖动调节油缸的另一端安装在所述机架上,所述控制器通过第三比例电磁阀控制所述抖动调节油缸的伸长量调节所述托轮的支撑高度。
29、上述的自适应捡拾装置,其中,所述抖动调节机构还包括抖动轮和固定块,所述抖动轮安装在所述侧板内侧并与所述输送链的上部链杆触接,所述抖动轮位于所述抖动调节油缸的另一端下方;所述固定块分别设置在所述大摆臂和小摆臂的内侧。
30、上述的自适应捡拾装置,其中,还包括除秧机构和切土圆盘,所述除秧机构安装在所述机架后端,并以所述输送链的中心线为对称中心设置;所述切土圆盘安装在所述机架前端,并位于所述捡拾铲两侧。
31、上述的自适应捡拾装置,其中,所述捡拾机构还包括对称设置的集薯板,一端分别与所述侧板的中部内侧连接,所述集薯板的另一端分别位于所述除秧机构的两侧。
32、本发明的有益功效在于:
33、本发明可对捡拾装置的工作参数进行有效的控制,提高整机作业效率,减少机手的操作难度、减轻机手的工作强度,避免机器产生无用功。
34、以下结合附图和具体实施例对本发明进行详细描述,但不作为对本发明的限定。
- 还没有人留言评论。精彩留言会获得点赞!