一种羊饲养定量投料设备及方法与流程
本发明涉及投料喂养,具体是涉及一种羊饲养定量投料设备及方法。
背景技术:
1、养羊历史悠久,因各地区地理形势、气候环境不同,羊的饲养模式也不尽相同。羊的饲养模式主要分为三种:舍饲、放牧和半放牧半舍饲;为了避免过度放牧致使生态环境恶化,牧区一般以放养与圈养相结合的方式进行牛羊养殖,即每日按时按量为羊投喂饲料,之后再将羊进行放养;现有的投喂饲料的方法是先将羊圈养在一个较大的圈舍内,然后直接向圈舍内的料槽投放饲料。
2、但是,现有的饲喂装置都是由人工投放草料,劳动强度较大;由于羊数量大,在食用饲料时容易出现抢食的现象,致使部分羊无法吃到饲料影响羊的生长,无法实现均衡饲养;针对上述技术问题,市面上出现相应的自动喂料设备,通过螺旋提升机将储料仓内的饲料不间断朝向料槽内传导,并在投料的过程中开动牵引车沿着料槽行走,实现自动投料,但是上述设备在实际使用过程中对料槽内投料的多少均是通过喂养人员对牵引车开动速度决定的,虽然可以通过调节螺旋提升机的转速来实现对放料快慢的调节,但是喂养人员无法在喂料的过程中将车辆始终控制在匀速状态,料槽内的饲料会呈现或多或少的现象,无法实现定量喂养;
3、更进一步的,上述喂料方式均适用于料槽呈统一直线且连贯的状态下使用,一旦出现料槽断连,在牵引车行驶至断处为了避免饲料掉落至地面造成饲料的浪费,喂养人员一般都会提前将螺旋提升机关闭,这就会导致料槽还未被填满时,下料就停止;并且在移动至下一处连接处时相应的也会延迟开启螺旋提升机导出饲料,同样会出现前述问题。
技术实现思路
1、针对上述问题,提供一种羊饲养定量投料设备,通过提供一种可以根据牵引车行距联动控制饲料下料速度的设备,从而解决了现有技术中无法对料槽内投放的饲料进行精准投料且在面对断连式连接的料槽进行下料时,无法保证对断连处料槽进行全覆盖下料的技术问题。
2、为解决现有技术问题,本发明提供一种羊饲养定量投料设备
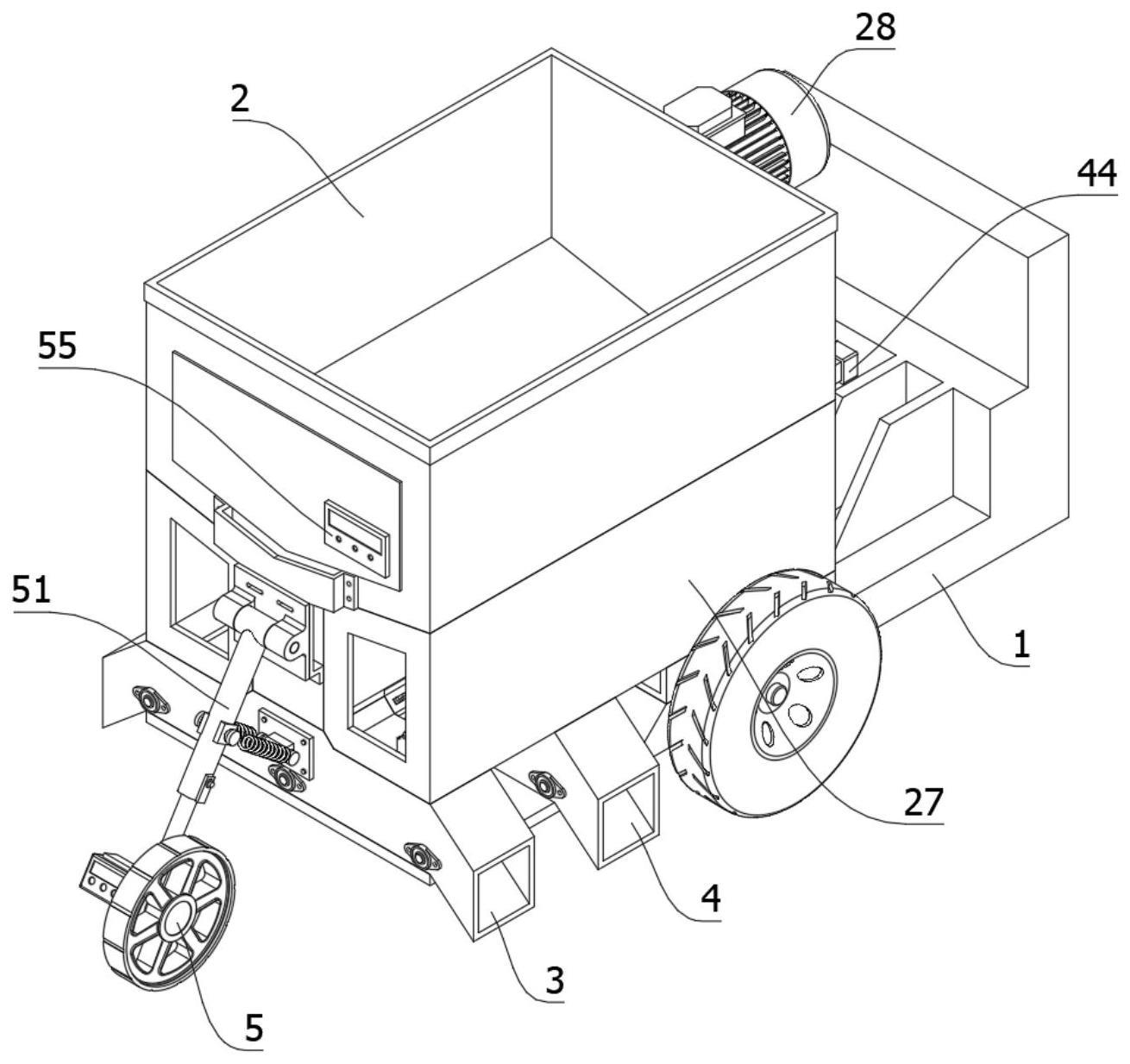
3、一种羊饲养定量投料设备,包括牵引车、设置在牵引车上的储料模组以及横向设置于储料模组正下方且与储料模组出料端连通设置的双向连续出料模组和双向定量出料模组;双向连续出料模组和双向定量出料模组均靠近牵引车车尾设置;动态测距控料模组呈倾斜状态弹性设置于储料模组靠近牵引车车尾处的一侧;工作下的动态测距控料模组检测端与地面抵触设置,用以根据牵引车行距联动控制储料模组下料速率。
4、优选的,储料模组包括储料仓以及沿着储料仓长边方向平行设置于储料仓底部的第一传导仓,储料仓通过第一支撑架固设置于牵引车上,螺旋送料辊通过两端设置的轴承座水平转动设置于第一传导仓内用以对储料仓内的饲料进行传导,螺旋送料辊通过设置于牵引车上的旋转驱动器驱动转动,所述第一传导仓两端底部还分别贯穿开设有供饲料导出的第一出料口和第二出料口;第一挡料板和第二挡料板呈水平状态分别设置于储料仓和第一传导仓连接处且分别对应第一出料口和第二出料口设置。
5、优选的,双向连续出料模组包括第一导料箱,第一导料箱为中空且两端开口的矩形仓,第一导料箱的顶部还开设有与第一出料口连通设置的第一进料口;传导辊沿着第一导料箱顶部的短边方向平行设置于第一导料箱内且沿着第一导料箱的长边方向等距设置有多组;多组传导辊外还传动套设安装有同步带;第一伺服电机水平固定设置于第一导料箱上且通过传导轴套设的第一传动带与传导辊传导连接。
6、优选的,双向定量出料模组包括定量称重元件,定量称重元件呈竖直状态设置于第二出料口正下方,转运元件呈水平状态设置于定量称重元件靠近牵引车车尾的一侧且与定量称重元件顶端齐平设置,用以对称重后的饲料朝向横向设置于转运元件出料端处的导出元件上传导,通过导出元件将饲料定量朝向料槽内导出;推料元件通过第一安装架呈水平状态固定设置于牵引车上且推料端水平朝向定量称重元件设置,用以将定量称重后的饲料推送至转运元件上。
7、优选的,转运元件包括第二传导仓,第二传导仓沿着储料仓长边方向平行设置于储料仓正下方用以引导饲料,所述第二传导仓内还设置有第一带式传输机,第一带式传输机沿着第二传导仓的长边方向平行设置于第二传导仓底部,用以将饲料朝向导出元件方向传导。
8、优选的,推料元件包括电动推杆,电动推杆通过第一安装架呈水平状态固定设置于牵引车上且输出端朝向储料仓方向设置,电动推杆的输出轴还固定设置有推料板,所述推料板由短板和长版呈l形拼接而成;其中长板呈水平状态贴合第二出料口设置。
9、优选的,导出元件包括第二导料箱,第二导料箱为中空且两端开口的矩形仓,第二导料箱的顶部还开设有第二进料口;第二带式传输机沿着第二导料箱的长边方向平行设置于第二导料箱内且靠近第二导料箱底部设置。
10、优选的,动态侧壁控料模组伸缩架,伸缩架通过铰接座铰接设置于储料仓靠近牵引车车尾的一侧,行走轮通过计数器转动设置于伸缩架前端,控制面板固定设置于储料仓后侧。
11、优选的,所述动态测距控料模组还包括有拉簧,拉簧通过两端设置的第一连接座和第二连接座分别与伸缩架的侧壁以及双向连续出料模组的侧壁固定连接,用以通过拉簧自身拉力弹性牵引行走轮与地面抵触。
12、优选的,速度传感器一,与所述牵引车的转速表电连接,用于读取当前牵引车的行走速度;
13、速度传感器二,设置在所述同步带的安装架上,用于检测所述同步带的传输速度;
14、转速传感器一,设置在所述第一伺服电机输出轴处,用于检测所述第一伺服电机输出轴的转速;
15、转速传感器二,设置在所述旋转驱动器输出轴处,用于检测所述旋转驱动器输出轴的转速;
16、计时器,设置在所述牵引车上,用于检测所述牵引车的工作时长;
17、报警器,所述报警器位于所述车身外壁;
18、控制器,所述控制器分别与所述速度传感器一、速度传感器二、转速传感器一、转速传感器二、计时器和报警器电性连接,所述控制器基于所述速度传感器一、速度传感器二、转速传感器一、转速传感器二、计时器控制所述报警器工作,包括:
19、步骤1:基于速度传感器一、速度传感器二、转速传感器一、转速传感器二、计时器的检测值,通过公式(1)计算相对于车速控制所述螺旋送料辊以及所述同步带的运行速度的误差指数:
20、(1)
21、其中,x为相对于车速控制所述螺旋送料辊以及所述同步带的运行速度的误差指数,为速度传感器一的检测值,为速度传感器二的检测值,为转速传感器一的检测值,为转速传感器二的检测值,为所述第一伺服电机输出轴的半径,为所述旋转驱动器输出轴的半径, t为计时器的检测值,为圆周率,取3.14,为所述螺旋送料辊的动载荷系数,为所述螺旋送料辊的安装角度,即螺旋叶片与螺旋送料辊轴线的夹角,为所述速度传感器一、速度传感器二、转速传感器一、转速传感器二精度系数的乘积,为所述螺旋送料辊以及所述同步带预设的损伤系数,sin为正弦,为自然常数,取值为2.72;
22、步骤2:所述控制器将相对于车速控制所述螺旋送料辊以及所述同步带的运行速度的误差指数与预设的误差指数范围进行比较,当车速控制所述螺旋送料辊以及所述同步带的运行速度的误差指数不在预设的误差指数范围时,所述控制器控制所述报警器发出报警提示。
23、一种羊饲养定量投料方法,应用于一种羊饲养定量投料设备,包括以下步骤:
24、s1:将处理好的饲料通过螺旋提升机导入储料仓内,随即开启牵引车行驶至羊圈内并放下伸缩架使行走轮抵触当前地面;
25、s2:开启储料模组使其呈放料状态,并根据投料需求驱使螺旋送料辊进行正转从第一出料口处导出饲料朝向双向连续出料模组内传导饲料或驱使螺旋送料辊反转从第二出料口处导出饲料朝向双向定量出料模组内传导饲料;从而分别实现连续投料和间歇性定量投料设定,调节完毕开动牵引车沿着料槽行走进行投料;
26、s3:投料过程中牵引车行驶至料槽断连处时,缓慢降低牵引车速,利用动态测距控料模组和储料模组的配合进行缓速送料,直至将当前料槽填满,关闭储料模组,直至行驶至下一处料槽时重新开启储料模组,随即提升牵引车行驶速度,使其储料模组回归正常放料状态即可。
27、本发明相比较于现有技术的有益效果是:
28、本发明通过储料模组对饲料进行持续放料的同时配合双向连续出料模组和双向定量出料模组对放出的饲料进行导料,实现了两种不同的放料状态,从而满足了不同的放料需求;同时配合储料模组后侧设置的动态测距控料模组实现了如何根据牵引车的行驶速度来实现动态控制储料模组动态放料的效果,实现对饲料的精准投放,牵引车行驶速度越快储料模组放料越快,相应的牵引车行驶速度越慢,储料模组放料越慢,相比传统投料设备通过目测控制放料多少,本设备更加智能化且定量投料精度高。
- 还没有人留言评论。精彩留言会获得点赞!