往复式大豆株间避苗除草装置及控制方法与流程
本发明属于农业除草,尤其是一种往复式大豆株间避苗除草装置及控制方法。
背景技术:
1、近年来,随着农业科技的发展,大豆产量的提升已成为农业发展的重点之一。然而,大豆的生长环境比较复杂,杂草的生长会对大豆产生影响,会与早期生长阶段的大豆植株竞争光照、水分和营养物质,若放任不管,会严重危害大豆的品质与产量。在大豆生长初期进行物理机械除草是保证大豆产量和品质的有效途径,也是降低环境污染和保障人员安全的重要措施。随着农业新型技术的发展,除草技术也在不断的创新,除了原始的人工除草外,出现了诸如生物除草、化学除草、热除草和物理机械除草的方法。其中,生物除草存在着无法根除杂草和受气候条件影响大的问题;化学除草具有省事、省力的优点,但会对环境产生影响,加速杂草产生抗药性;热除草技术只能适用于大型的平原,且受到条件限制大;物理机械除草具有无污染、绿色环保、劳动强度低等优点,但在除草作业中对于大豆株间的除草,尚存在除草率低、伤苗率高的问题。
2、为实现操作简单、高除净率和低伤苗率的田间除草作业,对大豆株间除草装置进行了探索和研究。在大豆植株和杂草的识别的方面,激光测距传感器有了广泛的应用。通过激光测距传感器采集植株信息,plc编程的大豆识别模型区分大豆植株和杂草,再用plc发送指令给伺服驱动器,间接控制电机驱动大豆株间除草机构进行避苗和除草作业,可以做到实时避苗和除草,效率高、无污染且操作简单,这是一种环境友好的物理机械除草方法。目前,除草执行部件是制约除草率和伤苗率的主要因素之一,除草执行部件的材质和形状会导致除草不彻底,甚至在误碰大豆植株时,将大豆植株的根茎割断。
技术实现思路
1、发明目的:提供一种往复式大豆株间避苗除草装置及控制方法,以解决现有技术中除草执行部件是制约除草率和伤苗率的主要因素之一,除草执行部件的材质和形状会导致除草不彻底,甚至在误碰大豆植株时,将大豆植株的根茎割断的问题。
2、技术方案:
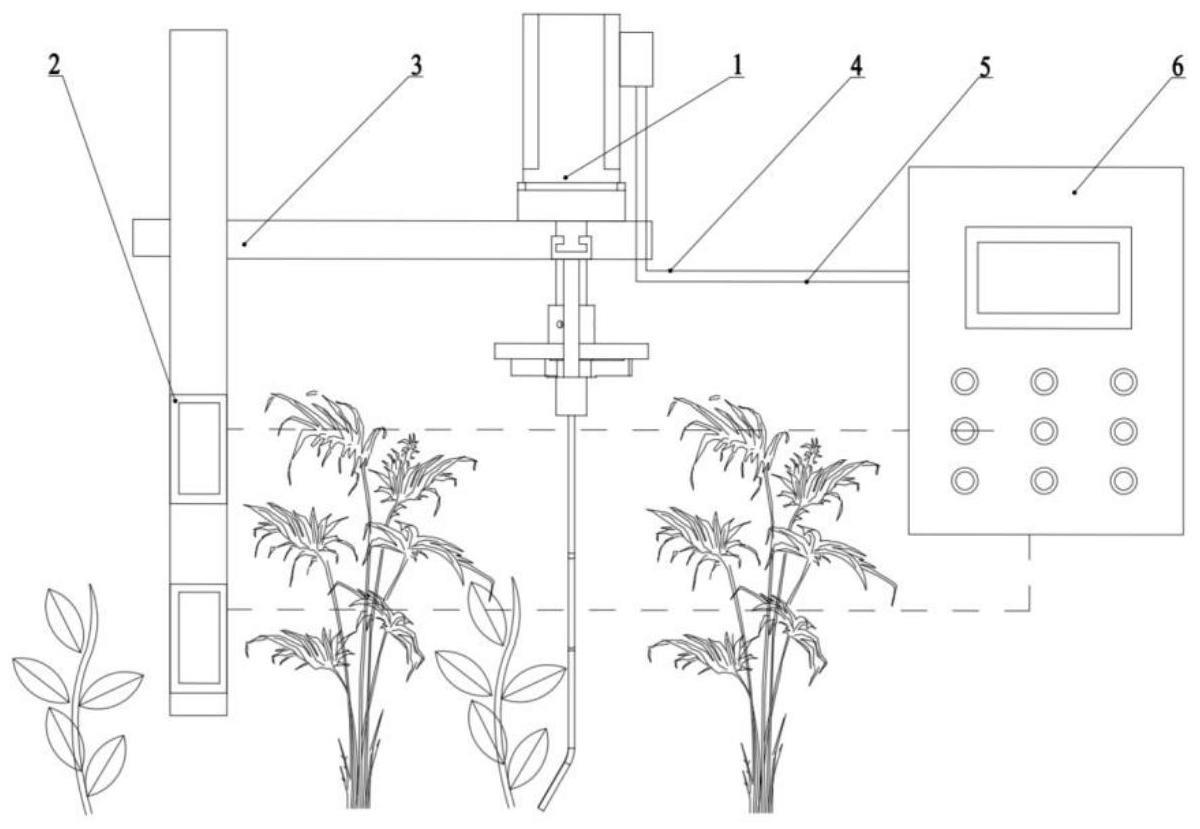
3、一种往复式大豆株间避苗除草装置,包括检测系统、控制系统和除草机构,所述检测系统包括激光测距传感器,所述激光测距传感器设于所述除草机构上用于测量所述激光测距传感器与被测物体之间的距离数据,所述被测物体包括大豆植株与杂草;
4、所述控制系统实时读取所述激光测距传感器检测到的距离数据,所述控制系统包括plc控制器、模拟量输入模块、连接模块和伺服动力模块,所述plc控制器根据大豆植株的直径、高度以及大豆植株株间种植的距离编写大豆识别模型的程序,所述激光测距传感器通过所述模拟量输入模块将产生的模拟量信号传递至所述plc控制器,所述plc控制器通过所述连接模块与所述伺服动力模块相连;
5、所述除草机构包括机架和设于所述机架上的伺服驱动组件和除草组件,所述除草组件包括两个梳齿板和仿形弹性梳齿,每一个所述梳齿板的下方焊接有等间距并排设置的若干个仿形弹性梳齿,所述伺服驱动组件驱动两个所述梳齿板相向移动,当所述检测系统检测到所述被测物体为大豆植株时,所述控制系统将信号发送至所述伺服动力模块,所述伺服动力模块控制所述伺服驱动组件运行,使得两个所述梳齿板在经过大豆植株时同步展开,进行避苗操作。
6、在进一步的实施例中,所述仿形弹性梳齿的材质包括软态不锈钢,所述仿形弹性梳齿共设有十二根,且每一个所述梳齿板的下方设有六根所述仿形弹性梳齿;
7、所述仿形弹性梳齿的形状模仿大豆植株的形状,根据大豆植株茎秆部分与子叶及以上的冠幅部分的高度位置进行仿形。
8、在进一步的实施例中,所述伺服驱动组件包括安装在所述机架上的伺服驱动器和伺服电机,所述伺服电机的驱动轴与主轴的一端相连,所述主轴的另一端连接有圆盘;
9、两个所述梳齿板对称设于所述圆盘的下方,每一个所述梳齿板与所述圆盘之间连接有一个连接杆,所述连接杆的两端均安装有转动轴,且其两端通过两个所述转动轴分别与所述梳齿板和所述圆盘转动连接;
10、所述机架朝向所述梳齿板的一面上安装有导轨,所述导轨上滑动连接有滑块,所述滑块和所述梳齿板之间通过固定杆相连接。
11、在进一步的实施例中,所述激光测距传感器在所述机架上设有两个,两个所述激光测距传感器在所述机架上设于同一垂直位置的上端与下端。
12、在进一步的实施例中,所述连接模块用于控制连接组件运行,所述连接组件包括用于传输信号的硬件设备、电机动力线和电机编码线,所述plc控制器通过所述硬件设备与所述伺服驱动器相连,所述伺服驱动器通过所述电机动力线和所述电机编码线与所述伺服电机相连。
13、在进一步的实施例中,所述plc控制器将所述激光测距传感器采集数据的距离数据转换为直径条件,所述激光测距传感器的量程为120mm-280mm;
14、所述plc控制器每10ms读取一次所述激光测距传感器当前的距离数据,再从当前距离数据中,观察连续满足量程在120mm-280mm之内,即所述激光测距传感器的最小量程和最大量程,且前后距离数据相差不大于10mm的点数,判断出被测物体的直径;
15、当所述激光测距传感器与被测物体之间的距离数据在其中一个所述激光测距传感器量程之内,且另一个所述激光测距传感器与被测物体之间的距离数据与当前距离数据差值在10mm之内,即当前数据距离为1,否则距离为0,计算公式如下:
16、
17、其中,d代表所述激光测距传感器与所述被测物体之间的距离;d0代表下一个所述激光测距传感器与所述被测物体之间的距离;dmin代表所述激光测距传感器最小量程;dmax代表所述激光测距传感器最大量程。
18、在进一步的实施例中,所述直径条件为当所述plc控制器从所述激光测距传感器中读取到的距离数据在所述激光测距传感器量程之内,记录为1;
19、当下个10ms采集到的距离数据如果在所述激光测距传感器量程之内,则记录值加1,即为2;
20、如果不在所述激光测距传感器量程之内,则记录值清零,等待下一次满足条件时,记录值重新为1,直径条件的计算公式如下:
21、dc=vt
22、
23、
24、其中,dc代表被测物体的理论直径;v代表运行速度;t代表开始检测到被测物体到结束的时间;x1代表当前10ms记录的距离数据;x2代表下一个10ms记录的距离数据;dmin代表激光测距传感器最小量程;dmax代表激光测距传感器最大量程;c代表被测物体的时间记录值。
25、在进一步的实施例中,所述plc控制器将所述激光测距传感器采集数据的距离数据转换为高度条件,当位于下端的所述激光测距传感器记录值大于等于2时,观察位于上端的所述激光测距传感器是否有在量程之内的距离数据,由于大豆植株茎秆较直,因此设置阈值为9mm;
26、位于上端的所述激光测距传感器检测到量程之内的距离数据时,在运行的9mm之内,位于下端的所述激光测距传感器记录值大于等于2;或者位于下端的所述激光测距传感器记录值大于等于2时,在运行的9mm之内,位于上端的所述激光测距传感器检测到量程之内的距离数据,以上两种情况都可以满足高度条件,直径条件计算公式如下:
27、
28、其中,dh上代表上方激光测距传感器与被测物体之间的距离数据;xh上代表上方激光测距传感器的位置;dh下代表下方激光测距传感器与被测物体之间的距离数据;xh下代表下方激光测距传感器的位置。
29、在进一步的实施例中,所述plc控制器将所述激光测距传感器采集数据的距离数据转换为间距条件,所述的间距条件是当前一个被测物体判断为大豆植株后,将开启10cm的间距条件,阈值为3cm,即在当前大豆植株后7-13cm之内满足直径条件和高度条件的植株,间距条件计算公式如下:
30、f(xl)=|xl前-xl后|,7≤xl≤13
31、其中,xl前代表前一株大豆植株的位置;xl后代表后一株大豆植株的位置。
32、一种用于控制所述往复式大豆株间避苗除草装置的控制方法,该方法包括以下步骤:
33、步骤1:除草机构移动时,激光测距传感器检测到前方的被测物体,将信号传递至控制系统中;
34、步骤2:plc控制器根据大豆识别模型的程序识别被测物体;
35、步骤3:若是被测物体为大豆植株,则伺服动力模块控制伺服驱动组件运行,两个梳齿板同步展开,进行避苗动作;
36、步骤4:若是被测物体不是可被大豆识别模型程序识别的大豆植株,则伺服动力模块控制伺服驱动组件运行,两个梳齿板同步闭合,进行除草作业。
37、本发明的有益效果:通过激光测距传感器获取被测物体的距离数据,plc控制器依据所编的大豆识别模型程序判断是否为大豆植株,除草机构下方梳齿并排布置,且做成仿形梳齿。这样一来在识别方面,能够有效避免光线、阴影等环境因素造成识别率下降,可以实时检测实时除草,且成本较低。通过并排布置的弹性仿形梳齿能够有效增加与土壤的接触面积,从而提高除草率;弹性仿形梳齿利用其本身的材质和形状,能够在误碰到大豆茎叶的情况下,只会使其歪曲而不损伤,而且仿形梳齿可以大大降低触碰到大豆植株的可能性,解决了大豆株间除草伤苗率过高的难题,具有较好的经济价值和社会价值,有良好的应用前景。
- 还没有人留言评论。精彩留言会获得点赞!