一种基于图像识别的苹果采摘机器人
本发明涉及一种苹果采摘机器人,特别涉及一种基于图像识别的苹果采摘机器人。
背景技术:
1、我国作为苹果生产的大国,每年的苹果采摘需要投入大量的人力,但是会用人力进行采摘时不仅费时费力同时采摘高处的苹果时可能会发生掉落的危险,与此同时需要不定时的更换角度方便将顶部的苹果采摘完毕。
2、现在一般在苹果庄园内部为避免大量人力的浪费以及节省成本都采用苹果采摘机器人进行采摘工作,机器人内部采摘收集为一体,大大节省了人力提高了效率。
3、但是现有的苹果采摘机器人在进行工作时,一般通过图像采集识别装置先对苹果表面的颜色进行识别,以确认其成熟度,随后实现采摘和收集,但目前的采摘机器人,虽然设置了精准的图像识别模块,但由于每次采摘时,都单独的照射苹果的一面对其进行颜色的识别,识别面积有限,苹果完整的成熟情况无法准确获知,这样如果照射面发绿,背面大部分面积发红,这样达到百分之八十泛红的苹果其成熟度已可采摘但识别后未采摘,会影响采摘效率,导致后续成熟的苹果腐烂没有及时转移售卖。
技术实现思路
1、本发明的目的在于提供一种基于图像识别的苹果采摘机器人,以解决上述背景技术中提出的但现有的在采摘机器人上安装的图像识别只能针对苹果的一面进行识别,容易产生漏采、提前采摘等情况。
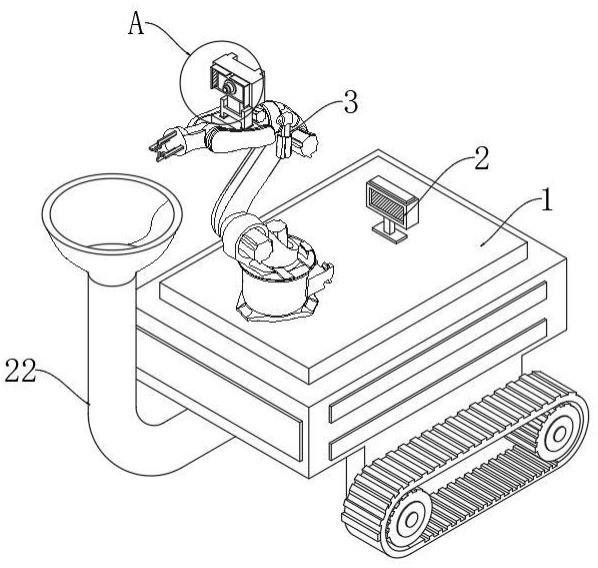
2、为实现上述目的,本发明提供如下技术方案:一种基于图像识别的苹果采摘机器人,包括采摘机器人本体,所述采摘机器人本体上表面的一侧设置有微处理器,所述采摘机器人本体上表面的另一侧设置有机械手臂,所述机械手臂与微处理器连接,所述机械手臂顶部的中部设置有支撑架,所述支撑架与机械手臂连接,所述支撑架的表面设置有图像采集机构,所述图像采集机构包括翻转组件、挡光组件以及设置在支撑架正表面中部的图像采集装置,所述支撑架的内部插接有横板,所述横板的底部固定连接有垂直板,所述垂直板的表面固定连接有第一镜面,所述挡光组件包括固定在横板背面的三级伸缩杆,所述三级伸缩杆端部的表面固定连接有固定环,所述固定环的一侧固定连接有连接杆,所述连接杆远离固定环的端部固定连接有活动环,所述活动环的底部连接有遮阳布,所述翻转组件包括在横板上表面定轴连接的转轴,所述转轴的顶部设置有电机本体,所述转轴的表面固定连接有转杆,所述转杆远离转轴的端部固定连接有连接轴,所述横板表面的一侧开设有环形槽,所述横板的底部设置有翻转板,所述翻转板处于环形槽的下方,所述翻转板的表面固定连接有第二镜面,所述翻转板一侧的表面设置有感应器本体,所述感应器本体与电机本体之间相互连接。
3、作为本发明的一种优选技术方案,所述活动环的内部插接有延伸柱,所述延伸柱的顶部固定连接有滑架,所述滑架靠近三级伸缩杆的一侧开设有辅助孔,所述连接杆通过辅助孔可以将活动环收缩以及延伸。
4、通过上述技术方案,在三级伸缩杆将横板顶出的同时可以带动固定环、连接杆以及活动环将遮阳布拉出,遮阳布的拉出辅助图像采集装置的图像捕捉不会受到外部光线的影响。
5、作为本发明的一种优选技术方案,所述翻转板的一侧设置有凸块,所述感应器本体设置在凸块的表面,所述连接轴的底部连接在凸块的顶部。
6、通过上述技术方案,感应器本体使用时感应有没有苹果处于垂直板的一侧,当翻转板表面的感应器本体移动位置到达苹果一侧之后,感应器本体将横板上表面的电机本体启动,电机本体的启动带动转轴、转杆以及连接轴转动,连接轴的转动带动与其相连接的翻转板翻转,翻转板的翻转带动感应器本体的角度发生改变,当翻转板完全翻转之后感应器本体感应不到苹果的位置,此时电机本体停止工作。
7、作为本发明的一种优选技术方案,所述采摘机器人本体底部的一侧设有收集管道,所述收集管道的底部固定连接有包裹环,所述包裹环的底部固定连接有第一收集箱,所述收集管道的内部插接有运输机构,所述运输机构包括缓震组件、清除组件以及感应器本体内部插接的传输杆,所述缓震组件包括固定连接在收集管道内壁的固定软管,所述固定软管远离收集管道的端部固定连接有固定架,所述固定架的上表面固定连接有缓冲布,所述固定架上表面远离固定软管的一侧固定连接有活动绳,所述活动绳远离固定架的端部固定连接有主绳,所述主绳的端部固定连接有挡板,所述主绳的外表面插接且贯穿有啮合块,所述啮合块的一侧啮合连接有转动齿轮,所述转动齿轮远离啮合块的一侧啮合连接有移动杆,所述移动杆的底部连接有弹簧丝,所述清除组件包括连接在移动杆远离弹簧丝底部的传动杆,所述传动杆的上表面固定连接有夹持板,所述传动杆表面远离夹持板的一侧活动连接有第一传导管,所述第一传导管远离传动杆的端部活动连接有竖向滑块,所述竖向滑块表面处于第一传导管的顶部活动连接有第二传导管,所述第二传导管远离竖向滑块的端部活动连接有刮板,所述刮板的两侧均滑动连接有滑动架。
8、通过上述技术方案,当苹果下落,首先与缓冲布相互接触,之后因缓冲布一侧活动绳的不稳定性,苹果会在缓冲布表面向着活动绳的一侧下滑,此时因苹果重力作用导致的移动杆会处于缓冲布的下方将苹果接住,与此同时移动杆的顶出会带动第一传导管顶出,第一传导管的移动带动滑动连接在收集管道内部表面的竖向滑块向上移动,竖向滑块的移动带动第二传导管顶出,第二传导管将刮板在滑动架的限位下向前方推进,进而将缓冲布表面的树枝推下。
9、作为本发明的一种优选技术方案,所述主绳的前半端水平部位插接在收集管道水平部位的内壁,所述主绳后半端水平部位插接在传输杆的内部,所述啮合块处于弹簧丝的内部,所述弹簧丝的内侧壁设置有开口。
10、通过上述技术方案,苹果落在缓冲布表面的重力经过活动绳的传导拉动主绳,因主绳处于收集管道内壁与传输杆的内壁呈现直角角度,所以活动绳拉动主绳的力转换为主绳拉动挡板的力。
11、作为本发明的一种优选技术方案,所述第一传导管与传动杆的连接部位设置有活动球,所述第二传导管与刮板的连接部位设置有活动球,所述竖向滑块与收集管道垂直部位的内壁之间滑动连接。
12、通过上述技术方案,挡板被拉动向着啮合块的方向移动,带动啮合块向后位移,啮合块的上方设置有挡块与传输杆的内壁之间相互配合,此时啮合块的移动带动转动齿轮转动,转动齿轮带动与其啮合的移动杆向前移动,移动杆的移动通过夹持板传导至传动杆,通过第一传导管带动竖向滑块上移,通过竖向滑块的上移带动刮板针对缓冲布表面的异物进行清理。
13、作为本发明的一种优选技术方案,所述传输杆远离收集管道的端部插接有第二收集箱,所述第二收集箱的顶部固定连接有连接柱,所述第二收集箱的内部设置有自适应空间结构,所述自适应空间结构包括设置在第二收集箱内侧壁的传送带,所述传送带的表面固定连接有停放板,所述传送带的内部啮合有转动卡轴,所述转动卡轴的表面连接有缠绕柱,所述缠绕柱的表面连接有第一不完全齿轮,所述转动卡轴远离缠绕柱的表面连接有第二不完全齿轮,所述缠绕柱的表面通过缠绕绳连接有承重块,所述第二不完全齿轮的一侧连接有弧形压力板。
14、通过上述技术方案,当苹果通过传输杆进入第二收集箱的内部时,首先接触弧形压力板,因弧形压力板设置有弧度,所以苹果会滚落至停放板的表面,当一个苹果不足以将传送带带动转动时,可以等之后的苹果落下,因弧形压力板的重力略小于顶部恢复弹簧与承重块的重力相加的反作用力,所以不需太多的苹果即可将传送带带动旋转,之后第二不完全齿轮与第一不完全齿轮旋转半周将弧形压力板带动运动直至将苹果输送至第二收集箱的底部弧形压力板在回复弹簧的作用下上升,传送带在承重块的带动下回复至原本位置。
15、作为本发明的一种优选技术方案,所述传送带根据停放板与弧形压力板之间的长度差距设置有多组,所述停放板之间的距离小于苹果本身的直径。
16、通过上述技术方案,传送带设置有多组且两组停放板之间的距离不会大于苹果的直径,保证多组停放板的总长度与弧形压力板的宽度相当,防止苹果直接滑落至第二收集箱的底部。
17、作为本发明的一种优选技术方案,所述第二不完全齿轮与第二收集箱的内壁之间定轴连接,所述第二不完全齿轮与第一不完全齿轮的一侧均通过啮合板与弧形压力板连接。
18、通过上述技术方案,上述连接关系保证传送带正常运行的同时不会产生位移。
19、作为本发明的一种优选技术方案,所述弧形压力板的顶部连接有回复弹簧,所述承重块的重量与回复弹簧的拉力略大于弧形压力板的重量。
20、通过上述技术方案,因弧形压力板的重力是将转动卡轴逆时针旋转,而弧形压力板顶部的回复弹簧以及承重块针对缠绕柱的拉力均是将转动卡轴顺时针方向拉动,所以苹果的重量需要与弧形压力板自身的重量配合大于承重块的重力以及回复弹簧的拉力才能够将苹果运输至第二收集箱的底部。
21、与现有技术相比,本发明的有益效果是:
22、本发明通过设置的图像采集机构、翻转组件和挡光组件,在图像采集装置扫描到苹果时,三级伸缩杆进行伸缩工作带动横板、第一镜面和第二镜面位移,辅助图像采集装置进行苹果的全方位采集工作,当翻转板处于苹果的两侧时,感应器本体扫描到苹果时带动电机本体转动,辅助第二镜面与翻转板翻转,在三级伸缩杆进行伸缩工作的同时带动遮阳布展开,为图像采集装置遮挡两侧的阳光,辅助图像采集装置针对苹果进行采集,达到了图像采集装置可以全方位采集到苹果的目的。
23、本发明通过设置的运输机构、缓震组件和清除组件,使用时,缓冲布为采摘下来的苹果提供缓震效果,苹果的重力带动清除组件将缓冲布表面带下来的异物进行清扫,达到了在苹果下落时对苹果进行保护,避免进行磕碰的目的。
24、本发明通过设置的自适应空间结构,在使用时当苹果运输至第二收集箱的内部时,苹果本身的重量加上弧形压力板的重量会带动传送带进行运动,当运动至第二收集箱的底部时,第二不完全齿轮与啮合板之间不再啮合,弧形压力板顶部的回复弹簧,辅助弧形压力板复位,弧形压力板不再针对苹果进行阻挡,使得苹果可以降落至第二收集箱的内部,达到了在收集苹果的过程中避免苹果磕碰的目的。
- 还没有人留言评论。精彩留言会获得点赞!