本发明涉及渔业捕捞,更具体地涉及一种大水面渔业养殖捕捞设备及其捕捞方法。
背景技术:
1、渔业养殖捕捞设备是指用于捕捞水生动物的各种工具和装备,随着科学技术的进步和水产养殖业的发展,我国捕捞装备逐步采用机械化设备,以提高捕捞效率;
2、如公告号为cn113994934b的中国发明专利公开了一种娃娃鱼养殖用快速捕捞设备及其使用方法,具体涉及娃娃鱼养殖技术领域,包括捕捞固定架和限位滤架,捕捞固定架的内部转动安装有传动杆,传动杆的外部转动连接有传动轮,传动轮的内部固定有钢丝绳,钢丝绳的底端固定设有透明盖板,透明盖板的下方设有快速捕捞箱,快速捕捞箱的底部设有固定卡座;通过设置有捕捞固定架方便装卸,且通过钢丝绳与传动轮连接方便带动快速捕捞箱向下运动进行捕捞,快速捕捞箱由于重力沉入娃娃鱼养殖槽内,此时第一捕捞网和第二捕捞网受力折叠在一起,通过第二电动伸缩杆工作带动固定卡座向下运动,从而打开快速捕捞箱进行捕捞。
3、但就目前提供的此类捕捞设备及其捕捞方法而言,仍然存在一定的不足之处:捕捞过程中的许多作业程序需要人工进行操控完成,自动化水平相对较低,且相邻两次捕捞作业之间的准备工作较为繁琐,延长了捕捞周期。
4、因此,亟需新的一种大水面渔业养殖捕捞设备及其捕捞方法,以实现对渔业水产的自动一体化智能诱捕过程,进一步提高捕捞效率,缩短捕捞周期。
技术实现思路
1、为了克服现有技术的上述缺陷,本发明提供了一种大水面渔业养殖捕捞设备及其捕捞方法,以解决上述背景技术中存在的捕捞过程中的许多作业程序需要人工进行操控完成,自动化水平相对较低,且相邻两次捕捞作业之间的准备工作较为繁琐,延长了捕捞周期的问题。
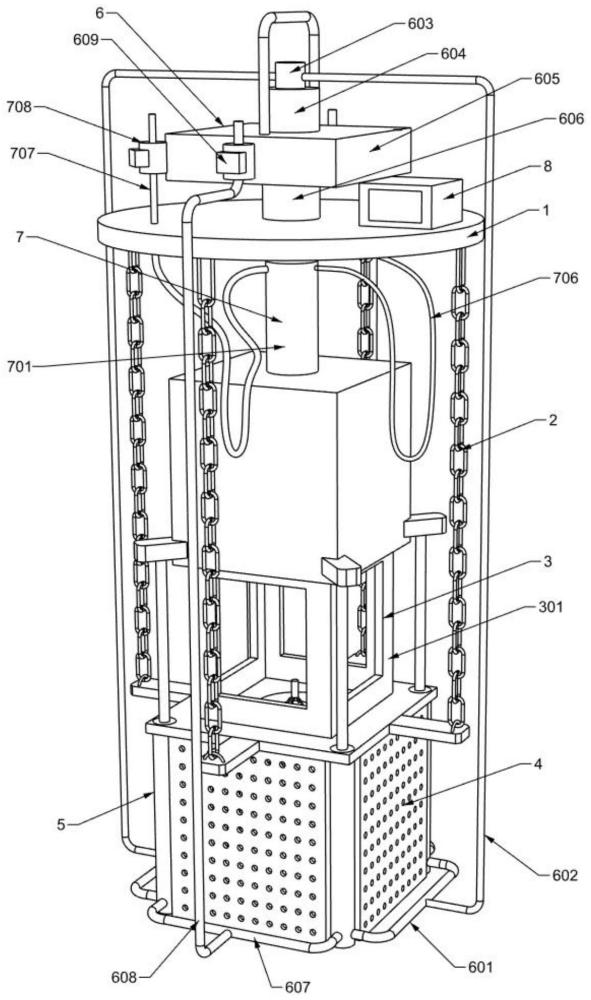
2、本发明提供如下技术方案:一种大水面渔业养殖捕捞设备,包括浮板,且浮板能够受浮力作用而克服捕捞设备及其最大捕获重力而漂浮在水面之上,所述浮板的底面四周通过钢链连接有位于浮板正下方的捕获组件,所述捕获组件包括投喂箱、第一连接杆、捕获罩及第二连接杆,其中所述投喂箱底端的四周侧壁均固定安装有第一连接杆,所述第一连接杆的外端与钢链的底端相扣合,位于第一连接杆上方的投喂箱四周侧壁开设有用以鱼类通过的仓口,所述投喂箱的正上方活动设置有用以盖合在其顶部的捕获罩,所述捕获罩外壁底端的四角固定安装有第二连接杆;
3、所述投喂箱的底部可拆卸安装有存储箱,所述投喂箱的底壁四角安装有位于存储箱外壁侧棱上且用以推动第二连接杆及捕获罩纵向移动的第一伸缩组件,所述存储箱底端的四周外围设置有延伸至浮板顶部的控气组件,所述控气组件与第一伸缩组件相连且通过控制控气组件抽气或泄压过程而调整第一伸缩组件的伸缩状态,所述捕获罩的顶端安装有与控气组件相连的第二伸缩组件,所述投喂箱的底壁上设置有用以限制鱼类进出存储箱的限流组件,所述浮板的顶部还设置有控制器。
4、进一步的,所述第一伸缩组件包括第一管膛、第一活塞杆、第一弹簧及第一气压检测器,其中所述第一管膛固定安装在投喂箱的底壁四角,所述第一活塞杆活动套接在第一管膛的内腔中,而第一活塞杆的塞柄底端与第一管膛内腔之间传动连接有第一弹簧,且第一活塞杆的塞柄内设置有第一气压检测器,所述第一活塞杆的塞杆顶端通过第二连接杆与捕获罩的底端四角进行固定连接;在第一管膛内外压强一致时,此时第一弹簧处于原长且充斥整个第一管膛内腔,并将第一活塞杆顶起至最大伸展状态,致使第一活塞杆顶端通过第二连接杆带动与之连接的捕获罩完全脱离投喂箱。
5、进一步的,所述控气组件包括u形排气管、第一导气管、集气管、第一气泵、集气箱、第二气泵及第二气泵,其中所述u形排气管设置在存储箱左右侧底端的外围并与同侧两个第一管膛内腔底端相通,所述u形排气管上连接有延伸至浮板顶部的第一导气管,所述第一导气管与集气管固定连接,所述集气管的底端设置有依次相连的第一气泵、集气箱及第二气泵。
6、进一步的,所述控气组件还包括u形供气管、第二导气管及第一泄压电磁阀,其中所述u形供气管设置在存储箱前后侧底端的外围并与同侧两个第一管膛内腔底端相通,所述u形供气管上连接有延伸至浮板顶部的第二导气管,所述第二导气管的顶端安装有第一泄压电磁阀。
7、进一步的,所述第二伸缩组件包括第二管膛、第二活塞杆、第二弹簧、压板、第二气压检测器、给压管、排压管及第二泄压电磁阀,其中所述第二管膛固定安装在捕获罩的顶部,所述第二管膛的内腔中活动套接有第二活塞杆,所述第二活塞杆的塞柄与第二管膛内腔底壁之间传动连接有活动套接在第二活塞杆塞杆表面的第二弹簧,所述第二活塞杆的塞柄顶部设置有第二气压检测器,且第二活塞杆的塞杆底端固定连接有位于捕获罩内腔的压板,所述第二管膛内腔顶端的通过给压管与第二气泵的排气端相连通,而第二管膛内腔顶端还通过排压管与安装在浮板顶部的第二泄压电磁阀相连通;在第二管膛内外压强一致时,此时第二弹簧处于原长且将第二活塞杆顶起,使得第二活塞杆整体缩合在第二管膛内腔中,致使第二活塞杆底端连接的压板缩合至捕获罩内腔的顶端。
8、进一步的,所述限流组件包括堵头、第三弹簧及拉力检测器,其中所述堵头的塞柄与投喂箱之间传动设置有活动套接在堵头塞杆表面的第三弹簧,所述堵头的顶端中心设置有拉力检测器,所述拉力检测器的顶部固定连接有用以系紧饵料的拉绳;在堵头未受到水压推动时,第三弹簧处于原长且牵引堵头将其阻塞在投喂箱底壁中心的通口内。
9、进一步的,所述存储箱的四周侧壁上开设有与外界相通的排水孔。
10、一种大水面渔业养殖捕捞设备的捕捞方法,基于所述的大水面渔业养殖捕捞设备,所述捕捞方法包括以下步骤:
11、s1、上钩阶段:水域中的鱼类被系在拉绳顶部的饵料所吸引,继而鱼类穿过投喂箱四周开设的仓门到达饵料所在处并开始进食,而当鱼类进食的过程中撕扯系紧在拉绳顶端的饵料而产生向外的拉力时,拉力通过拉绳传递至拉力检测器,继而拉力检测器检测到此拉力并产生拉力信息,则判定此时鱼类已上钩并身处在投喂箱内部,通过控制器接收拉力信息而输出对第一气泵和第一泄压电磁阀的控制指令;
12、s2、封锁阶段:第一气泵和第一泄压电磁阀接收控制器所输出的控制指令,继而控制第一气泵启动和第一泄压电磁阀关阀,使得第一管膛内腔及其连通管路处于封闭抽气状态,继而位于第一泄压电磁阀下方连通的第二导气管、u形供气管及第一管膛内腔的气体依次经由u形排气管、第一导气管及集气管后通过第一气泵的排气端快速注入集气箱内腔,使得第一管膛内腔气体被迅速抽离,继而第一管膛内腔形成负压,第一活塞杆在此内外压差作用下压缩第一弹簧并迅速缩合至第一管膛内腔,而通过第二连接杆连接在第一活塞杆顶端的捕获罩及第二伸缩组件将在第一活塞杆向下缩合过程中随之共同下移,使得捕获罩迅速盖合在投喂箱的顶部,封锁投喂箱四周仓门,致使投喂箱内腔的鱼类无法逃离;
13、s3、转移阶段:在捕获罩完全盖合在投喂箱的顶部,此时第一管膛内腔的压强到达第一气压检测器所设定的最低气压阈值,判定此时第一活塞杆所提供向下牵引力使得投喂箱和捕获罩完成封锁,则第一气压检测器向控制器输出谷值气压信息,通过控制器接收谷值气压信息而输出对第一气泵和第二气泵及第二泄压电磁阀的控制指令,继而控制第一气泵关闭、第二气泵启动及第二泄压电磁阀关阀,使得第二管膛内腔及其连通管路处于封闭充气状态,继而s2中注入集气箱内腔的气体通过第二气泵及与之排气端连通的给压管导入第二管膛内腔中,致使第二管膛内腔顶端的气压逐渐升高,高压气体向下推动第二活塞杆并压缩第二弹簧,而连接在第二活塞杆底端的压板将沿着捕获罩内腔共同下移并压缩已盖合在投喂箱顶部的捕获罩内腔水体,水体受压而推动堵头向下拉伸第三弹簧而脱离投喂箱底壁的通口,使得水体中的鱼类协同水体穿过通口被一同压注至存储箱内;
14、s4、复位阶段:在第二活塞杆底端连接的压板完全将捕获罩内腔的水体挤压至存储箱内,此时第二管膛内腔的压强到达第二气压检测器所设定的最高气压阈值,判定此时第二活塞杆所提供的向下推动力能够使得盖合在投喂箱顶部的捕获罩内腔水体和鱼类被完全推送至存储箱内,则第二气压检测器向控制器输出峰值气压信息,通过控制器接收峰值气压信息而输出对第二气泵和第一泄压电磁阀及第二泄压电磁阀的控制指令,控制第二气泵关闭、第一泄压电磁阀开阀及第二泄压电磁阀开阀,继而第一管膛内腔通过与之连通的u形供气管、第二导气管及第一泄压电磁阀泄压,而第二管膛内腔通过与之连通的排压管及第二泄压电磁阀泄压,继而在第一弹簧和第二弹簧的弹性势能作用下,分别推动第一活塞杆和第二活塞杆复位并致使捕获罩恢复至捕捞初期的使用状态;
15、s5、执行s1-s4的循环操控过程,以进行渔业水产的自动一体化智能诱捕作业。
16、本发明的技术效果和优点:
17、本发明通过设有捕获组件和第一伸缩组件及控气组件和第二伸缩组件,有利于通过设置在投喂箱内的饵料吸引鱼类进入投喂箱内部,检测到鱼类的进食后,控制捕获罩迅速盖合在投喂箱的顶部,封锁投喂箱四周仓门,致使投喂箱内腔的鱼类无法逃离,进一步控制压板将沿着捕获罩内腔共同下移并压缩已盖合在投喂箱顶部的捕获罩内腔水体,水体受压而推动堵头向下拉伸第三弹簧而脱离投喂箱底壁的通口,使得水体中的鱼类协同水体穿过通口被一同压注至存储箱内,以实现对渔业水产的自动一体化智能诱捕过程,进一步提高捕捞效率,缩短捕捞周期。