一种乌鸡蛋和普通鸡蛋物联网智能化检测区分装置及方法与流程
本发明涉及农业领域的人工智能系统及物联网检测技术,具体为一种乌鸡蛋和普通鸡蛋物联网智能化检测区分装置及方法。
背景技术:
1、乌鸡蛋与普通鸡蛋相比,水分、脂肪明显低于普通鸡蛋;蛋白质略低于普通鸡蛋;胆固醇含量高于普通鸡蛋;磷脂和b2明显高于普通鸡蛋;乌鸡蛋含有较高的人体必备的氨基酸;综合来说,乌鸡蛋具有比普通鸡蛋更高的营养价值,乌鸡蛋的蛋壳为绿色普通鸡蛋,而普通鸡蛋的蛋壳为白色和黄色,因此对乌鸡蛋和普通鸡蛋进行加工检测区分时,需要通过视觉传感器进行区分,再通过自动化设备对其进行输送分装。
2、对乌鸡蛋和普通鸡蛋进行检测区分时,往往都是将其放置到输送装置上,通过检测装置对其进行检测,再通过分装装置对其进行区分,现有的检测区分装置是直接将生产好的乌鸡蛋和普通鸡蛋进行上料检测,然而刚生产出来的乌鸡蛋和普通鸡蛋其外壁上都存在污垢,这些污垢会大大的降低传感器对其检测的精准度,从而会大大的影响对乌鸡蛋和普通鸡蛋进行区分,导致工作人员需要二次对乌鸡蛋和普通鸡蛋进行检测区分,大大的降低了对其检测区分效率。
3、为此,我们研发出了新的一种乌鸡蛋和普通鸡蛋检测区分装置。
技术实现思路
1、(一)解决的技术问题
2、针对现有技术的不足,本发明提供了一种乌鸡蛋和普通鸡蛋物联网智能化检测区分装置及方法,解决了现有的检测区分装置是直接将生产好的乌鸡蛋和普通鸡蛋进行上料检测,然而刚生产出来的乌鸡蛋和普通鸡蛋其外壁上都存在污垢,这些污垢会大大的降低传感器对其检测的精准度,从而会大大的影响对乌鸡蛋和普通鸡蛋进行区分,导致工作人员需要二次对乌鸡蛋和普通鸡蛋进行检测区分,大大的降低了对其检测区分效率的问题。
3、(二)技术方案
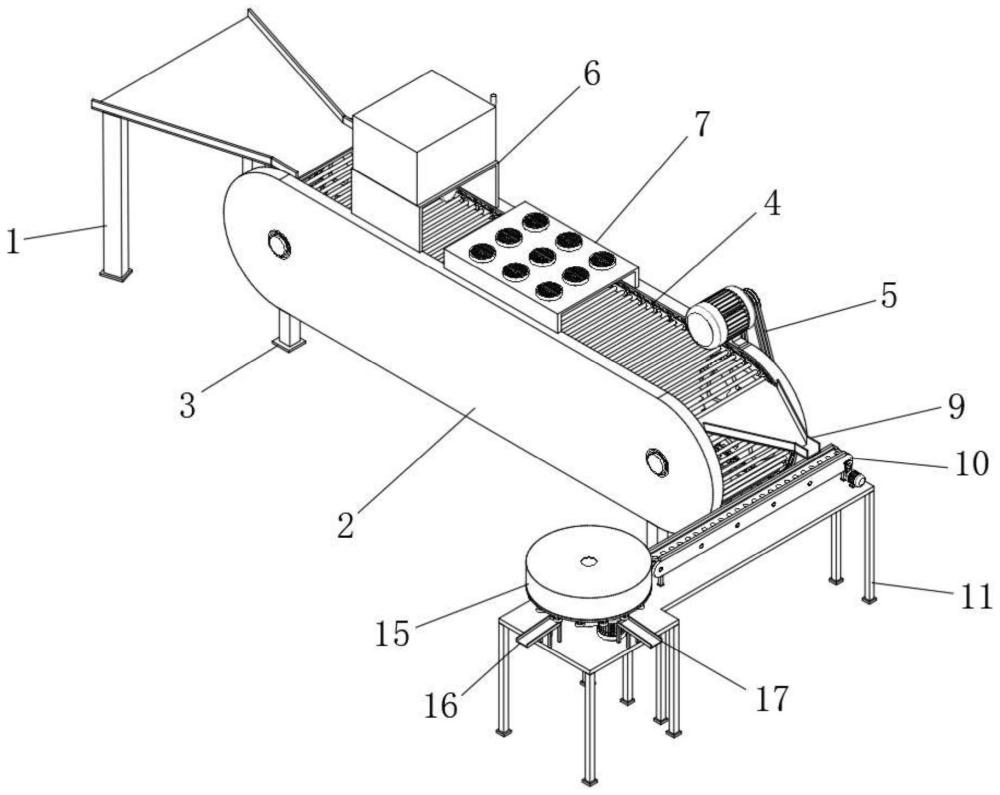
4、为实现以上目的,本发明通过以下技术方案予以实现:一种乌鸡蛋和普通鸡蛋物联网智能化检测区分装置,包括上料架,所述上料架的一侧安装有两个第一固定壳,两个所述第一固定壳的底部均固定连接有两个第一支撑杆,两个所述第一固定壳之间安装有输送机构,所述输送机构的顶部一侧安装有驱动机构;
5、所述输送机构的顶部另一侧安装有清洗机构,所述输送机构的顶部靠近清洗机构的一侧位置安装有吹干机构,两个所述第一固定壳内壁之间的底部固定连接有排水漏斗;
6、所述输送机构的一侧安装有第一排料架,所述第一排料架的底部安装有传送机构,所述传送机构的底部固定连接有支撑架,所述传送机构的前端安装有第二排料架,所述支撑架的顶部靠近第二排料架的前端位置固定连接有接料座,所述接料座的顶部开设有第二弧形凹槽;
7、所述支撑架的顶部前端安装有检测区分机构,所述支撑架的顶部靠近检测区分机构的前端位置固定连接有第一下料架,所述支撑架的顶部靠近检测区分机构的一侧位置固定连接有第二下料架。
8、优选的,所述上料架前后端外壁的一侧分别与两个第一固定壳的内壁固定连接。
9、通过上述技术方案,具有很好的支撑性和固定性,从而便于对多个乌鸡蛋和普通鸡蛋进行上料,防止上料架不稳定从而影响对多个乌鸡蛋和普通鸡蛋造成破碎。
10、优选的,所述输送机构包括多个第一轴承,多个所述第一轴承分别固定连接于两个第一固定壳的外壁,每两个所述第一轴承之间固定连接有连接轴,多个所述第一轴承的外壁均固定连接有链轮,每两个所述链轮之间均安装有链条,两个所述链条之间固定连接有多个输送杆,多个乌鸡蛋和普通鸡蛋可以通过上料架输送到多个输送杆上,多个输送杆通过两个链条进行移动。
11、通过上述技术方案,两个链条可以通过对应的多个链轮进行驱动,从而可以带动多个乌鸡蛋和普通鸡蛋进行传送,同时两个第一固定壳具有很好的固定性和防尘效果,从而提高输送机构和驱动机构的驱动效果。
12、优选的,所述驱动机构包括第一安装架,所述第一安装架固定连接于其中一个第一固定壳的顶部一侧,所述第一安装架的顶部安装有第一伺服电机,所述第一伺服电机输出轴的外壁固定连接有第一同步轮,其中一个所述连接轴的外壁后端固定连接有第二同步轮,所述第一同步轮和第二同步轮之间安装有第一同步带。
13、通过上述技术方案,当第一伺服电机开始工作时,第一伺服电机通过输出轴转动带动第一同步轮进行转动,第一同步轮转动从而带动第一同步带进行转动,第二同步轮随之进行转动从而带动其连接的连接轴进行转动,其连接轴转动从而带动其前后端相连接的两个链轮进行转动,其中两个链轮转动从而带动了两个链条进行转动,使得两个链条分别带动多个输送杆进行移动,从而实现了对多个输送杆上的多个乌鸡蛋和普通鸡蛋进行传送,多个输送杆移动速度较慢,从而防止多个乌鸡蛋和普通鸡蛋在输送的过程中发生撞击破碎,且多个输送杆通过第一伺服电机驱动进行自动移动,大大的提高了对多个乌鸡蛋和普通鸡蛋加工效率。
14、优选的,所述清洗机构包括第一固定框,所述第一固定框固定连接于两个第一固定壳的顶部另一侧位置,所述第一固定框的顶部安装有水箱,所述水箱的后端一侧顶部安装有进水管,所述水箱的底部另一侧固定连接有第二安装架,所述第二安装架的底部安装有水泵,所述水泵的一侧顶部与水箱之间固定连接有第一连接管,所述水泵的一侧底部固定连接有第二连接管,所述第二连接管的底端安装有喷水座,所述喷水座的底部安装有多个喷水头。
15、通过上述技术方案,当多个乌鸡蛋和普通鸡蛋通过多个输送杆输送到多个喷水头的下方位置时,此时水泵开始工作,水泵通过第一连接管对水箱进行抽水,通过第二连接管输送到喷水座内,喷水座从而将抽取的水通过多个喷水头向其底部进行喷洒,从而实行了对多个乌鸡蛋和普通鸡蛋的外壁进行了清洗,从而防止多个乌鸡蛋和普通鸡蛋外壁上的污垢影响检测区分机构对其进行检测,该装置通过清洗机构进行自动清洗,不仅效率较高,也提高了对乌鸡蛋和普通鸡蛋的检测精准度。
16、优选的,所述吹干机构包括第二固定框,所述第二固定框固定连接于两个第一固定壳的顶部中心,所述第二固定框的顶部安装有多个机壳,多个所述机壳内均安装有风机。
17、通过上述技术方案,清洗后的多个乌鸡蛋和普通鸡蛋通过多个输送杆输送到多个风机的下方时,此时多个风机均开始工作,从而对多个乌鸡蛋和普通鸡蛋其外部的水进行送风吹干,防止其外壁的水影响检测区分机构对其检测。
18、优选的,所述传送机构包括两个第二固定壳,两个所述第二固定壳的底部均固定连接有两个第二支撑杆,两个所述第二固定壳的顶部均固定连接有挡条,两个所述第二固定壳的外壁均固定连接有多个第二轴承,每两个所述第二轴承之间均固定连接有转轴,多个所述转轴的外壁均固定连接有皮带轮,所述支撑架的顶部一侧固定连接有第三安装架,所述第三安装架的顶部安装有第二伺服电机,所述第二伺服电机输出轴的外壁固定连接有第三同步轮,其中一个所述转轴的外壁一端固定连接有第四同步轮,所述第三同步轮和第四同步轮之间安装有第二同步带,多个所述皮带轮之间安装有皮带,所述皮带的外壁开设有多个第一弧形凹槽。
19、通过上述技术方案,多个乌鸡蛋和普通鸡蛋进行清理后,会通过第一排料架一侧排料口一个个输送到皮带上,使得皮带上多个第一弧形凹槽分别对多个乌鸡蛋和普通鸡蛋进行了支撑,此时第二伺服电机便开始工作,第二伺服电机通过输出轴转动带动第三同步轮进行转动,第三同步轮转动从而带动第二同步带进行转动,第四同步轮随之进行转动从而带动与其相连接的转轴进行转动,转轴转动从而带动与其相连接的皮带轮进行转动,皮带轮从而带动皮带进行转动,从而实行了对皮带上的多个乌鸡蛋和普通鸡蛋进行传送,从而便于检测区分机构对其进行检测。
20、优选的,所述第一排料架前后端外壁的另一侧分别与两个第一固定壳的内壁固定连接,所述第一排料架的底部一侧固定连接于其中一个挡条的顶部。
21、通过上述技术方案,使得第一排料架具有较强的固定性和支撑性,多个乌鸡蛋和普通鸡蛋通过第二排料架会一个个传送到接料座上,从而会通过接料座上的第二弧形凹槽进行支撑,从而便于吸套对其进行吸住固定。
22、优选的,所述检测区分机构包括固定套,所述固定套固定连接于支撑架的顶部前端,所述固定套的顶部转动连接有支撑柱,所述支撑架的顶部靠近固定套的一侧位置固定连接有环形固定架,所述环形固定架的顶部安装有第三伺服电机,所述第三伺服电机输出轴的外壁固定连接有第五同步轮,所述支撑柱的外壁固定连接有第六同步轮,所述第五同步轮和第六同步轮之间安装有第三同步带,所述支撑柱的顶部固定连接有圆盘,所述圆盘的顶部固定连接有多个安装座,多个所述安装座的顶部均安装有气缸,多个所述气缸活塞的底端均固定连接有伸缩管,多个所述伸缩管的底部均安装有吸套,多个所述吸套的顶部一侧均安装有无线单向阀,所述支撑架的顶部靠近固定套的后端位置安装有控制器和通信模块,所述支撑架的顶部靠近固定套的另一侧位置固定连接有支撑板,所述支撑板的另一侧安装有视觉传感器,所述圆盘的顶部安装有防尘壳,所述视觉传感器(1516)和控制器相连接,然后通过通信模块将分析数据交互传输到远端电脑,实现乌鸡蛋和普通鸡蛋远程检测区分。
23、通过上述技术方案,当乌鸡蛋或普通鸡蛋传送到接料座上时,此时位于接料座上方的气缸开始工作,气缸通过活塞进行推动带动吸套向下移动,吸套通过无线单向阀对接料座上的鸡蛋进行了吸附固定,气缸再将活塞进行回收,与此同时第三伺服电机开始工作,第三伺服电机通过输出轴转动带动第五同步轮进行转动,第五同步轮转动从而带动第三同步带进行转动,第六同步轮随之进行转动从而带动支撑柱进行转动,使得支撑柱转动带动圆盘进行转动,使得圆盘转动带动多个气缸进行转动,当所吸附固定的鸡蛋转动经过视觉传感器照射后,从而实现了对所吸附固定的鸡蛋进行了检测区分,此时视觉传感器通过信号传递给控制器,使得控制器再将信号传递给所吸附固定鸡蛋上的无线单向阀,从而有效可以对检测后的鸡蛋进行区分下料,乌鸡蛋可以通过圆盘转至第一下料架的上方进行下料,普通鸡蛋可以通过圆盘转至第二下料架的上方进行下料,检测区分机构不仅检测区分效率较快,且检测精准度较高,从而避免了二次检测。
24、优选的,多个所述安装座、多个气缸、多个伸缩管、多个吸套和多个无线单向阀均环形分布于圆盘的顶部,多个所述气缸的活塞均贯穿圆盘的顶部。
25、通过上述技术方案,检测区分机构通过多个气缸和多个吸套对鸡蛋进行吸附固定,且进行移动,从而便于视觉传感器对其进行检测,同时整个过程都是通过自动化机械设备运行,效率较高,从而有效的对乌鸡蛋和普通鸡蛋快速进行检测区分。
26、本发明的一种乌鸡蛋和普通鸡蛋物联网智能化检测区分方法,包括以下步骤:
27、步骤a,通过上料架1对多个乌鸡蛋和普通鸡蛋进行上料,多个乌鸡蛋和普通鸡蛋输送到多个输送杆405上时,第一伺服电机502便开始工作,其输出轴会通过第一同步轮503和第一同步带505驱动第二同步轮504同步转动,第一同步带505在转动时会带动两个连接轴402上的两个链轮403进行转动,多个链轮403转动分别带动两个链条404进行转动,使得两个链条404转动带动多个输送杆405进行移动,从而实现了对多个输送杆405上的多个乌鸡蛋和普通鸡蛋进行传送;
28、步骤b,当多个乌鸡蛋和普通鸡蛋通过多个输送杆405输送到多个喷水头609的下方位置时,此时水泵605开始工作,水泵605通过第一连接管606对水箱602进行抽水,通过第二连接管607输送到喷水座608内,喷水座608从而将抽取的水通过多个喷水头609向其底部进行喷洒,从而实行了对多个乌鸡蛋和普通鸡蛋的外壁进行了清洗,清洗后的多个乌鸡蛋和普通鸡蛋通过多个输送杆405输送到多个风机703的下方时,此时多个风机703均开始工作,从而对多个乌鸡蛋和普通鸡蛋其外部的水进行送风吹干;
29、步骤c,清洁后的多个乌鸡蛋和普通鸡蛋会通过第一排料架9一侧的排料口一个个输送到皮带1012上,使得皮带1012上多个第一弧形凹槽1013分别对多个乌鸡蛋和普通鸡蛋进行了支撑,此时第二伺服电机1008便开始工作,其输出会通过第三同步轮1009和第二同步带1011驱动第四同步轮1010同步转动,第四同步轮1010在转动的过程中会带动与其相连接的转轴1005进行转动,使得转轴1005转动带动与其相连接的皮带轮1006进行转动,皮带轮1006从而带动皮带1012进行转动,从而实行了对皮带1012上的多个乌鸡蛋和普通鸡蛋进行传送;
30、步骤d,当乌鸡蛋或普通鸡蛋通过皮带1012和第二排料架12传送到接料座13上时,此时位于接料座13上方的气缸1510开始工作,气缸1510通过活塞进行推动带动吸套1512向下移动,吸套1512通过无线单向阀1513对接料座13上的鸡蛋进行了吸附固定,气缸1510再将活塞进行回收,与此同时第三伺服电机1504开始工作,其输出轴会通过第五同步轮1505和第三同步带1507驱动第六同步轮1506同步转动,从而带动支撑柱1502进行转动,使得支撑柱1502转动带动圆盘1508进行转动,使得圆盘1508转动带动多个气缸1510进行转动,当所吸附固定的鸡蛋转动经过视觉传感器1516照射后,从而实现了对所吸附固定的鸡蛋进行了检测区分,此时视觉传感器1516通过信号传递给控制器1514,使得控制器1514再将信号传递给所吸附固定鸡蛋上的无线单向阀1513,从而有效可以对检测后的鸡蛋进行区分下料,乌鸡蛋可以通过圆盘1508转至第一下料架16的上方进行下料,普通鸡蛋可以通过圆盘1508转至第二下料架17的上方进行下料;
31、步骤d中,所述视觉传感器1516和控制器1514相连接,然后通过通信模块将分析数据交互传输到远端电脑,实现乌鸡蛋和普通鸡蛋远程检测区分,,首先通过改进的支持向量机算法分类和分辨乌鸡蛋和普通鸡蛋,这将使系统能够在不同光照条件下获取鸡蛋的数量、大小、形状、颜色数据;然后对分类好的鸡蛋通过卷积神经网络检测到破损、受污染或有异常的鸡蛋,并将其分离出来,以确保产品质量,具体过程为:
32、步骤1,收集两方面数据,第一组收集数据:收集大量关于乌鸡蛋和普通鸡蛋的图像数据,这些数据应该包括不同光照条件下、不同颜色、大小和不同角度的鸡蛋图像;第二组收集数据:收集正常和异常鸡蛋的样本,包括破损鸡蛋、受污染鸡蛋、异常形状鸡蛋以及颜色异常鸡蛋;
33、第一步:
34、获取大量鸡蛋数据,包括乌鸡蛋和普通鸡蛋;
35、记录每个鸡蛋的数量;
36、测量每个鸡蛋的大小,包括长度和宽度;
37、记录每个鸡蛋的形状特征,如椭圆形或圆形;
38、获取每个鸡蛋的颜色信息,包括外壳颜色;
39、第二步:
40、获取破损鸡蛋:检测鸡蛋壳上的裂纹、碎片或明显的破损区域,通过图像分析来识别;
41、获取受污染鸡蛋:鸡蛋表面有明显的污渍、异物或杂质,通过颜色和纹理分析来实现;
42、获取异常形状鸡蛋:检测到形状异常的鸡蛋,包括变形或不规则的形状,这需要检测鸡蛋的轮廓和形状;
43、获取颜色异常鸡蛋:检测到颜色异常的鸡蛋,包括过度变色或斑点,通过颜色分析来实现;
44、步骤2,对采集的图像数据进行预处理,包括裁剪、调整大小、去除噪声;
45、步骤3,从处理后的图像数据中提取特征,这些特征包括两组,第一组特征包括数量、大小、形状、颜色特征;第二组特征:提取鸡蛋的颜色、纹理和形状特征;
46、步骤4,为每个图像标记所属的类别,分为两类,第一类标签为:乌鸡蛋或普通鸡蛋,第二类标签为:将异常鸡蛋的标签分配为“异常”,正常鸡蛋的标签分配为“正常”;
47、步骤5,将标记好的数据集分两个阶段训练:
48、第一个阶段:第一组收集数据和第一组特征用于训练svm(支持向量机)分类器,得到第一类标签,svm的目标是找到一个最佳的决策边界,以将不同类别的鸡蛋分开,svm会找到最大间隔的分离超平面,以确保在新数据上有更好的泛化能力;
49、svm模型的目标函数如下:
50、
51、约束条件为:
52、yi(w·xi+b)≥1,对于所有的i,将引入非线性核函数k(xi,xj),将特征映射到高维空间,以处理非线性分类问题,新的目标函数为:
53、
54、约束条件变成:
55、yi(w·φ(xi)+b)≥1-ξi,ξi≥0,对于所有的i,在这里,φ(·)表示将输入特征xi映射到高维空间。现在,需要最小化目标函数,同时确保约束条件成立;
56、为了简化目标函数,可以引入拉格朗日乘子αi和βi,得到拉格朗日函数如下:
57、
58、其中,ai和βi是非负拉格朗日乘子;
59、接下来,需要对l(w,b,ξi,αi,βi)分别对w,b,ξi求偏导,并令它们等于零,以求解最优的w,b和ξi,这将涉及一系列微分和代数运算,通常需要使用拉格朗日对偶问题来求解;
60、上面的公式符号含义解释为:
61、w:特征权重向量,表示分类超平面的法向量;
62、b:特征权重向量,表示分类超平面的法向量,偏差(或截距);
63、c:正则化参数,用于权衡间隔最大化和错误分类点之间的权重,控制了模型的复杂度,较大的c值会减小松弛变量(ξi)的权重,使分类更加严格;
64、ξi:松弛变量,用于允许一些样本不满足严格的约束条件,它测量每个样本点与分类超平面的距离,以及其是否被正确分类,ξi的值可以是零或正数,取决于点的位置相对于分类超平面;
65、yi:样本的类别标签,通常为+1或-1,表示乌鸡蛋或普通鸡蛋;
66、第二个阶段:第二组收集数据和第二组特征用于训练cnn(卷积神经网络)模型,得到第二类标签;
67、假设有一组包含鸡蛋数据的图像数据集,其中每个图像有相应的标签,标明鸡蛋是否为“正常”或“异常”;
68、a.输入数据:训练数据集包含n张图像,每张图像表示为xi,并有相应的标签yi(i=1,2,...,n),其中y可以是o(正常鸡蛋)或1(异常鸡蛋);
69、b.cnn模型的输出:模型的输出是一个二元分类结果,表示图像xi;属于“正常”或“异常″”的概率,通常用p(yi=1|xi)表示,这个输出是通过模型的前向传播得到的,使用softmax激活函数进行分类;
70、c.损失函数:使用交叉熵损失函数来衡量模型的性能,损失函数的表达式如下:
71、
72、输入层:图像大小为128x128像素,3个通道(rgb颜色图像);
73、cnn结构为:
74、卷积层1:32个卷积核,大小为3x3,使用relu激活函数,步幅(stride)为1,不使用填充(padding)。
75、池化层1:最大池化,大小为2x2;
76、卷积层2:64个卷积核,大小为3x3,使用relu激活函数。步幅为1,不使用填充;
77、池化层2:最大池化,大小为2x2;
78、全连接层1:128个神经元,使用relu激活函数;
79、全连接层2:2个神经元,使用softmax激活函数,表示“正常”和“异常”类别的概率;
80、d.模型训练:
81、损失函数:交叉熵损失函数;
82、优化算法:随机梯度下降;
83、学习率:0.001;
84、批处理大小:32;
85、训练周期(epochs):50;
86、当装置检测到鸡蛋图像时,将图像输入到训练好的cnn模型中,模型输出一个概率分布,表示“正常”和“异常”类别的概率,可以根据阈值将其分类为“正常”或“异常”鸡蛋。
87、(三)有益效果
88、本发明提供了一种乌鸡蛋和普通鸡蛋物联网智能化检测区分装置。具备以下有益效果:
89、1、该乌鸡蛋和普通鸡蛋检测区分装置,通过设计有输送机构、驱动机构、清洗机构和吹干机构,工作人员可以通过输送机构对乌鸡蛋和普通鸡蛋进行输送,同时通过清洗机构和吹干机构对其进行快速清洗和吹干处理,从而将乌鸡蛋和普通鸡蛋外壁上粘接的污垢进行快速清理,会大大提高传感器对其检测的精准度,进而提高了该装置的检测区分效率。
90、2、该乌鸡蛋和普通鸡蛋检测区分装置,通过设计有传送机构、检测区分机构、第一下料架和第二下料架,清洗后的乌鸡蛋和普通鸡蛋可以通过传送机构将其进行分拣,从而便于检测区分机构对其进行检测,最后可以通过第一下料架和第二下料架分别对乌鸡蛋和普通鸡蛋进行下料,整个过程都是通过自动化机械设备运行,效率较高,从而有效的对乌鸡蛋和普通鸡蛋快速进行远程检测区分。
91、3、本发明的改进的svm可以适应不同光照条件、鸡蛋大小和形状的变化,从而提高系统的鲁棒性,svm的二元分类适合本发明的乌鸡蛋或普通鸡蛋的区分,预测速度相对较快,适合实时快速分类乌鸡蛋和普通鸡蛋;选用cnn可以自动学习鸡蛋图像的特征,而无需手动提取特征,这使得系统更能适应不同视觉特征的变化,包括颜色、纹理、形状等,此外,cnn可以用于更复杂的图像分析任务,包括检测微小的瑕疵或隐蔽的问题,如内部异常,它可以识别鸡蛋的多种视觉特征,包括破损鸡蛋、受污染鸡蛋、异常形状鸡蛋和颜色异常鸡蛋的特征,提高检测的灵敏度。综合来看,结合svm和cnn可以利用它们各自的优势,实现更全面的性能提升。svm在快速的二元分类方面表现出色,而cnn在高级图像分析和特征学习方面表现出色。结合两种算法可以实现多类别的鸡蛋分类,而不仅仅是正常和异常两个类别。这可以用于检测不同类型的异常或进行更详细的分类。svm在初步筛选方面快速且准确,然后cnn可以进一步进行深度分析,提高准确性;svm和cnn的结合在鸡蛋检测和质量控制中提供了更全面、高性能、鲁棒性和智能性的解决方案,有助于提高产品质量和食品安全。
- 还没有人留言评论。精彩留言会获得点赞!