一种基于液压控制的深松铲过载保护装置及方法
本发明属于农业机械,涉及一种基于液压控制的深松铲过载保护装置及方法。
背景技术:
1、深松作业环境复杂恶劣,深松铲工作在坚硬的犁底层,入土困难,入土深度大,再加上土壤中作物根系或石块等杂质的存在会导致深松铲受到的耕作阻力瞬间变大,因此,深松铲极易受到冲击而变形或弯折。现有的深松机多插装安全销,根据阻力较大时,安全销首先被绞断,进而切断阻力这一原理进行过载保护;部分深松机通过增加弹性结构进行缓冲来实现过载保护。但是,采用安全销或弹性结构进行过载保护的临界阻力值并不精确,且要实现临界阻力值调整及过载后深松机恢复正常工作状态,需要更换安全销或调整机械结构,速度较慢,降低了深松机的作业效率。
2、中国发明专利申请“一种深松铲防过载保护装置”(申请号:202221090669.0)通过在主框架和安装架之间安装弹性结构,起到吸收力和释放力的作用,在遇到杂物时将深松铲臂抬起,绕过石块,继续进行作业,其过载时受到的阻力值并不精确,压力值也不易调整。
技术实现思路
1、针对上述技术问题,本发明的目的是提供一种基于液压控制的深松铲过载保护装置及方法,该装置能控制深松铲迅速准确地进行动作,过载保护临界阻力值便于调整,过载保护后迅速恢复工作状态。
2、为了实现上述目的,本发明提供了如下技术方案:
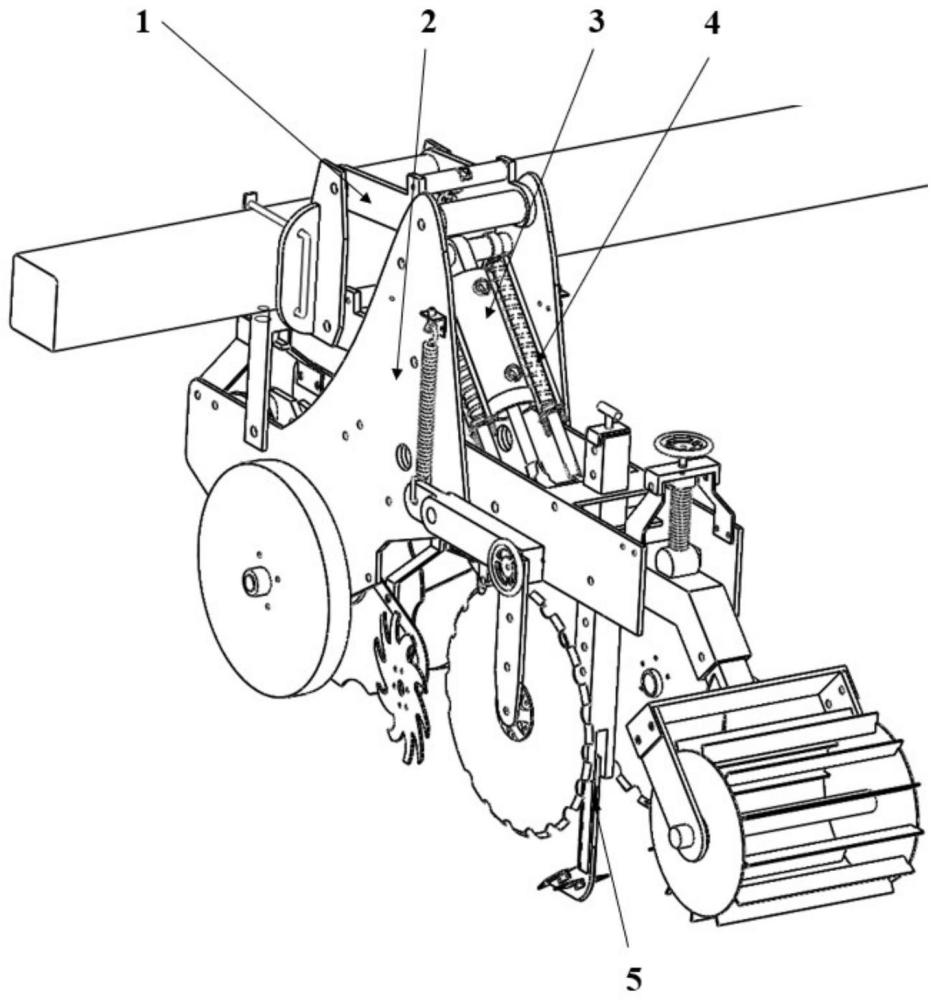
3、一种基于液压控制的深松铲过载保护装置,包括四杆仿形机构1、深松单体2、液压执行系统3、可调式动态阻尼缓冲机构4、控制系统和液压及电源供给系统。
4、所述液压及电源供给系统包括动力机械多路液压输出口和车载蓄电池。
5、所述深松单体2包括机架21、悬挂架22、覆土镇压装置23、切茬轮24、深松铲25、拨茬轮26、缺口圆盘刀27和地轮28;所述机架21通过销轴与四杆仿形机构1固接,所述四杆仿形机构1通过“u”形螺栓固接在拖拉机后方的安装横杆上;所述悬挂架22的前端通过铰接销轴铰接在机架21的后部,并能够在竖直平面内转动一定角度;所述缺口圆盘刀27沿机具轴线安装在机架21的前部,两个地轮28安装在机架21的前部的左右两侧;两个拨茬轮26安装在机架21的中部的左右两侧;所述深松铲25沿机具轴线通过深松铲固定架入土深度可调地安装在悬挂架22的中部;两个切茬轮24安装在悬挂架22的中部的左右两侧;所述覆土镇压装置23安装在悬挂架22的后部。
6、所述液压执行系统3包括液压油缸31;所述液压油缸31的缸体端和活塞杆端分别通过铰接销轴与机架21和悬挂架22铰接,用于向深松铲25提供入土及正常工作的推力,通过活塞杆的伸缩带动悬挂架22及深松铲25转动。
7、所述液压执行系统3进一步包括保压模块32、过载卸荷模块33和油箱34;所述保压模块32包括三位四通电磁换向阀321、液控单向阀322和电接触式压力表323;所述过载卸荷模块33包括先导式溢流阀331和二位二通电磁换向阀332。
8、所述三位四通电磁换向阀321的进油口p与液压及电源供给系统的动力机械多路液压输出口连接;三位四通电磁换向阀321的第一出油口a与液压油缸31的有杆腔油口及液控单向阀322的控制油路连接;三位四通电磁换向阀321的第二出油口b与液控单向阀322的进油口连接,用于向保压模块32和液压油缸31提供液压油液;三位四通电磁换向阀321的回油口t与油箱34连接。
9、所述液控单向阀322的出油口连接液压油缸31的无杆腔油口,用于有效长时间保压,防止液压油缸31的活塞杆受压缩回。
10、所述电接触式压力表323内部的测量系统连接液压油缸31的无杆腔油口,用于检测液压油缸31的无杆腔的压力;所述电接触式压力表323同时与三位四通电磁换向阀321连接,用于控制三位四通电磁换向阀321的电磁铁1ya得电或失电,进而控制阀芯移动。所述先导式溢流阀331的进油口与液压油缸31的无杆腔油口连接,用于调控输入油液的最高压力值;所述先导式溢流阀331的出油口与油箱34连接;所述先导式溢流阀331的远程控制口与二位二通电磁换向阀332连接。
11、所述二位二通电磁换向阀332的第一油口a与先导式溢流阀331的远程控制口连接,二位二通电磁换向阀332的第二油口b与油箱34连接,用于控制先导式溢流阀331卸荷;所述二位二通电磁换向阀332与控制系统连接,用于接收控制信号。
12、所述液压油缸31的左右两侧设有两个可调式动态阻尼缓冲机构4,用于减缓液压缸活塞运动接近终端时的速度,避免对液压缸端盖的撞击;所述可调式动态阻尼缓冲机构4包括第一伸缩杆41、第二伸缩杆42、第一连接件43、第二连接件44、螺母45、弹簧座46、弹簧47、第一螺纹杆48、第二螺纹杆49和支撑板410;所述第二伸缩杆42套接在第一伸缩杆41的内部,第二伸缩杆42能够在第一伸缩杆41内部自由滑动;所述第一连接件43和第二连接件44分别螺纹连接在第一伸缩杆41和第二伸缩杆42的端部,第一连接件43和第二连接件44分别通过销轴铰接在机架21和悬挂架22上。
13、所述支撑板410固接在第一伸缩杆41的端部,所述弹簧座46套于第一伸缩杆41和第二伸缩杆42的外部,位于第一伸缩杆41和第二伸缩杆42两侧的第一螺纹杆48和第二螺纹杆49的无螺纹端固接在支撑板410上,第一螺纹杆48和第二螺纹杆49的螺纹端穿过弹簧座46上预留的孔与螺母45螺纹连接,使得弹簧座46只能沿着第一伸缩杆41和第二伸缩杆42在螺母45的一侧运动;所述弹簧47套于第一伸缩杆41和第二螺纹杆49的外部,一端与支撑板410贴合,另一端套于弹簧座46上;通过旋转螺母45,减少弹簧座46和支撑板410的最大距离,使弹簧47处于预压缩状态。
14、当悬挂架22绕着与机架21的铰接点转动时,第二伸缩杆42沿着第一伸缩杆41滑动,当缩短到第二连接件44碰到弹簧座46并仍继续缩短时,弹簧座46向第一连接件43方向滑动,预压缩的弹簧47缩短,给第二连接件44以与运动方向相反的阻力,进而对所述悬挂架22的转动起到缓冲作用。
15、所述控制系统包括数据采集单元和控制单元;所述数据采集单元包括拉压力传感器5、信号放大模块、模数转换模块;所述控制单元包括单片机和继电器;所述拉压力传感器5、信号放大模块、模数转换模块、单片机、继电器依次连接,所述继电器与液压执行系统3的二位二通电磁换向阀332连接;所述拉压力传感器5安装在深松铲25的铲柄251的后端面上,用于检测深松铲25在拉压力传感器5安装位置的应变。
16、所述拉压力传感器5输出的模拟信号经过信号放大模块放大后,由模数转换模块转换为控制单元可处理的数字信号,并将数字信号传输至单片机;所述单片机通过控制程序判断深松铲是否过载,并生成不同指令信号,控制继电器开关,从而向二位二通电磁换向阀332输出高低电平,控制二位二通电磁换向阀332动作。
17、所述动力机械多路液压输出口向液压执行系统3提供液压动力;所述车载蓄电池向电磁换向阀、电接触式压力表、继电器、单片机提供电源。
18、所述深松铲25包括铲柄251、翼板252、铲尖253;所述铲尖253和两个翼板252固接在铲柄251的下端;所述铲柄251采用双向减阻结构,铲柄251的迎土端面和后端面均开有减阻刃口254,铲柄251的左右侧端面均沿竖直方向设有减阻凹槽255;所述铲柄251的下端前端面与水平面之间的夹角为锐角,铲柄251的下端后端面为一段弧形曲线;所述铲尖253为凿形,下端面具有两块相互平行的连接板组成的卡槽,与铲柄251的下端的左右侧端面贴合,铲尖253通过螺栓与铲柄251可拆卸地固接;所述翼板252通过螺栓对称地固接在铲柄251的下端的左右侧端面上,翼板252倾斜安装。
19、在所述保压模块32中,当电磁铁1ya得电,三位四通电磁换向阀321右位接入回路,液压油缸31的无杆腔压力上升至电接触式压力表323的上限值时,上触点接电,使电磁铁1ya失电,三位四通电磁换向阀321处于中位,回路卸荷,液压油缸31由液控单向阀322保压;当液压油缸31的无杆腔压力下降至设定的下限值时,电接触式压力表323发出信号控制电磁铁1ya得电,所述液压及电源供给系统的动力机械多路液压输出口再次向液压执行系统3供油,使压力上升,当压力达到上限值时,上触点发出信号使电磁铁1ya失电,循环往复,从而自动向液压油缸31补充压力油,实现长期的保压。
20、在所述过载卸荷模块33中,当二位二通电磁换向阀332处于关闭状态时,先导式溢流阀331的远程控制口与油箱34断开,系统输出最高压力为先导式溢流阀331本身的溢流压力;当二位二通电磁换向阀332处于开启状态时,先导式溢流阀331的远程控制口与油箱34接通,系统输出最高压力为油箱34的压力,此时回路卸荷。
21、所述第一螺纹杆48和第二螺纹杆49所在平面与第二连接件44所连接的位于悬挂架22上的销轴的轴线相互垂直,且第一螺纹杆48所连接的螺母45与第二螺纹杆49所连接的螺母45之间的距离大于第二连接件44的外径。
22、所述第一伸缩杆41的长度小于液压油缸31缸体部分的长度,弹簧47长度大于液压油缸31缸体部分的长度,且预压缩状态下的弹簧47仍需大于液压油缸31缸体部分的长度,使悬挂架22转动过程中从第二连接件44碰到弹簧座46开始,到停止转动过程中,持续受到弹簧47给予的阻力;通过旋转螺母45,改变弹簧座46与支撑板410之间的距离,改变悬挂架22转动过程受到弹簧47给予的阻力的作用时间。
23、所述拉压力传感器5安装位置处应变和深松铲所受牵引阻力的数学模型为:
24、
25、公式1中,f为深松铲所受牵引阻力,单位为n;e为深松铲弹性模量,单位为mpa;i为惯性矩,单位为mm4;ε为应变值;x为拉压力传感器5的安装位置距离深松铲铲尖的垂直距离,单位为mm;y为安装处距离深松铲横截面中性轴距离的绝对值,单位为mm。
26、一种基于所述的深松铲过载保护装置的深松铲过载保护方法,包括如下步骤:
27、s1、正常工作情况下,控制系统检测到深松铲25所受牵引阻力小于设定的安全阈值,二位二通电磁换向阀332处于关闭状态,先导式溢流阀331的远程控制口不与油箱34连接,先导式溢流阀331的调定压力为其本身的溢流压力,此时液压油缸31的输入油液压力高,工作腔压力大,向深松铲25及悬挂架22提供足够的支撑力,液压油缸31的活塞杆处于伸出状态,深松铲25正常入土进行深松作业;
28、s2、深松铲25触碰到杂物的瞬间,控制系统检测到深松铲25所受牵引阻力大于设定的安全阈值,通过继电器522控制二位二通电磁换向阀332动作,使二位二通电磁换向阀332处于打开状态,先导式溢流阀331的远程控制口与油箱34连接,先导式溢流阀331的调整压力等于油箱34压力,此时先导式溢流阀331的调定压力几乎为零,液压油缸31卸荷,液压油缸31的活塞杆不向深松铲25提供支撑力,深松铲25及悬挂架22在牵引阻力的作用下绕悬挂架22与机架21的铰接销轴向后转动,使深松铲25的铲尖253提升一定的高度,避开杂物;
29、s3、避开杂物后,控制系统检测到深松铲25所受牵引阻力小于设定的安全阈值,通过继电器522控制二位二通电磁换向阀332动作,使二位二通电磁换向阀332回复到关闭状态,先导式溢流阀331的调定压力回复为其本身的溢流压力,液压油缸31工作腔压力变大,向深松铲25及悬挂架22提供足够的支撑力,液压油缸31的活塞杆伸出,深松铲25及悬挂架22绕悬挂架22与机架21的铰接销轴向前转动,重新回到工作深度,继续工作。
30、所述步骤s2中,根据公式2和公式3,通过控制液压油缸31的工作行程进而控制深松铲25的铲尖253的提升高度;
31、
32、
33、公式2和公式3中,l为液压油缸31的工作行程,单位为m;d为液压油缸31和机架21的铰接销轴与悬挂架22和机架21的铰接销轴在垂直方向上的距离,单位为m;c液压油缸31和机架21的铰接销轴与悬挂架22和机架21的铰接销轴在水平方向上的距离,单位为m;a为悬挂架22和机架21的铰接销轴与悬挂架22和液压油缸31的铰接销轴之间的距离,单位为m;θ为悬挂架22及深松铲25的摆动角度,单位为°;h为深松铲25的铲尖253的提升高度,单位为m;h为悬挂架22到深松铲25的铲尖253的垂直方向上的距离,单位为m;b为悬挂架22到深松铲25的铲尖253的水平方向上的距离,单位为m。
34、所述步骤s2中,根据公式4,通过控制液压油缸31的活塞杆的伸缩速度进而控制悬挂架22及深松铲25的摆动角速度;
35、
36、公式4中,w为悬挂架22及深松铲25的摆动角速度,单位为rad/s;v1为液压油缸31的活塞杆的伸缩速度,单位为m/s;a为悬挂架22和机架21的铰接销轴与悬挂架22和液压油缸31的铰接销轴之间的距离,单位为m;α为液压油缸31的活塞杆与悬挂架22轴线之间夹角,单位为°;
37、深松铲25的铲尖253在水平方向的绝对速度vx和在垂直方向的提升速度vy分别为:
38、
39、
40、公式5和公式6中,vm为动力机具的作业速度,单位为m/s;w为悬挂架22及深松铲25的摆动角速度,单位为rad/s;b为悬挂架22到深松铲25的铲尖253的水平方向上的距离,单位为m;h为悬挂架22到深松铲25的铲尖253的垂直方向上的距离,单位为m;θ为悬挂架22及深松铲25的摆动角度,单位为°;
41、深松铲25在触碰到杂物的瞬间,θ=0°,α=α0,θ为悬挂架22及深松铲25的摆动角度,α0为正常工作时液压油缸31的活塞杆与悬挂架22轴线之间的夹角,此时铲尖253在水平方向的绝对速度应与机具的前进方向相反,即应满足vx<0,即悬挂架22及深松铲25的摆动角速度w应满足:
42、
43、液压油缸31活塞杆的伸缩速度v1应满足:
44、
45、公式7和公式8中,vm为动力机具的作业速度,单位为m/s;b为悬挂架22到深松铲25的铲尖253的水平方向上的距离,单位为m;h为悬挂架22到深松铲25的铲尖253的垂直方向上的距离,单位为m;a为悬挂架22和机架21的铰接销轴与悬挂架22和液压油缸31的铰接销轴之间的距离,单位为m。
46、与现有技术相比,本发明的有益效果在于:
47、1)本发明中,采用可调式动态阻尼缓冲机构防止卸荷后的液压油缸活塞对液压油缸缸盖的冲击,延长液压油缸使用寿命,通过旋转螺母可以快速方便地调整给予悬挂架及液压油缸活塞杆的缓冲时间和路程。
48、2)本发明中,采用贴片式传感器检测深松铲应变,单片机根据设定的程序分析应变值是否小于设定值,并控制液压执行系统进行过载保护,相比于安全销或增加弹性装置等机械过载保护结构,基于液压控制的深松铲过载保护精度更高。
49、3)本发明中,通过更改系统的参数,调节控制系统设置的牵引阻力的安全阈值,可以便捷地调节过载保护的临界值,根据不同深松铲的材质及形状进行过载保护临界值的调节,实现在不同深松机具上的模块化使用。
50、4)本发明中,深松铲铲柄后侧加工成尖棱形,且后部的侧面形状为一段弧形曲线,以减小深松铲离开土壤的阻力,提高深松铲向后转动速度,便于过载时,深松铲在牵引阻力作用下快速轻便地向后转动,绕过杂物;深松铲铲柄采用双向减阻结构,提高深松铲抗弯强度和抵抗冲击能力。
- 还没有人留言评论。精彩留言会获得点赞!