一种直道及弧道结合式遛马系统
本发明涉及一种遛马装置的改进,属于马匹训练领域,尤其涉及一种直道及弧道结合式遛马系统。
背景技术:
1、马被人类驯化以来,在漫长的发展过程中,由于各地区自然环境的影响和不同时期社会经济发展的需要,马的用途经历了肉用、乳用、农业生产、交通运输、军事和运动娱乐等多个阶段交替或互相融合的过程,并且在现在,马和猫,狗一样,逐渐成为宠物型动物,但是,马是适应游牧环境的动物,在自然环境中,它们每天会行走8-26公里,对于马来说,持续的运动,遛马能帮助它们帮它们强健骨骼,减少浮肿,而骨质疏松,浮肿正是长期生活在马厩中的马最常遇到的问题,现有技术中遛马的吊拍都依赖悬挂进行,由于支架沿着环形轨道移动的时候吊拍上下晃动,不仅稳定性较差,吊拍的抖动也容易惊吓到马匹。
2、申请号为cn202221417349.1,申请日为2022年6月8日的中国专利申请揭示了一种悬挂式遛马机,包括固定框和转动轴,其特征在于:所述固定框上表面四角处分别固定连接有悬挂固定件,所述固定框四周中间位置固定连接有上层固定架,所述上层固定架上表面固定连接有轴承内环,所述转动轴上端表面固定连接有旋转台,所述旋转台外表面四周中心位置及靠边缘一侧位置分别固定连接有横杆,多个所述横杆下表面固定连接有轴承外环,所述转动轴下端外表面一周靠边缘位置等间距固定连接有多个悬臂梁框架。本实用新型中,通过设置在固定框顶的悬挂固定件,实现了该装置可以悬挂在任何位置,提高了场地地面面积的利用率,在使用该遛马机时,转动轴带动挡马竿旋转,实现对马匹的训练和调教。但是上述技术并没有解决现有的遛马装置稳定性较差,容易惊吓到马匹的问题。
3、公开该背景技术部分的信息仅仅旨在增加对本专利申请的总体背景的理解,而不应当被视为承认或以任何形式暗示该信息构成已为本领域一般技术人员所公知的现有技术。
技术实现思路
1、本发明的目的是克服现有技术中遛马装置稳定性较差,容易惊吓到马匹的问题,提供了遛马装置稳定性较好,不容易惊吓到马匹的一种直道及弧道结合式遛马系统。
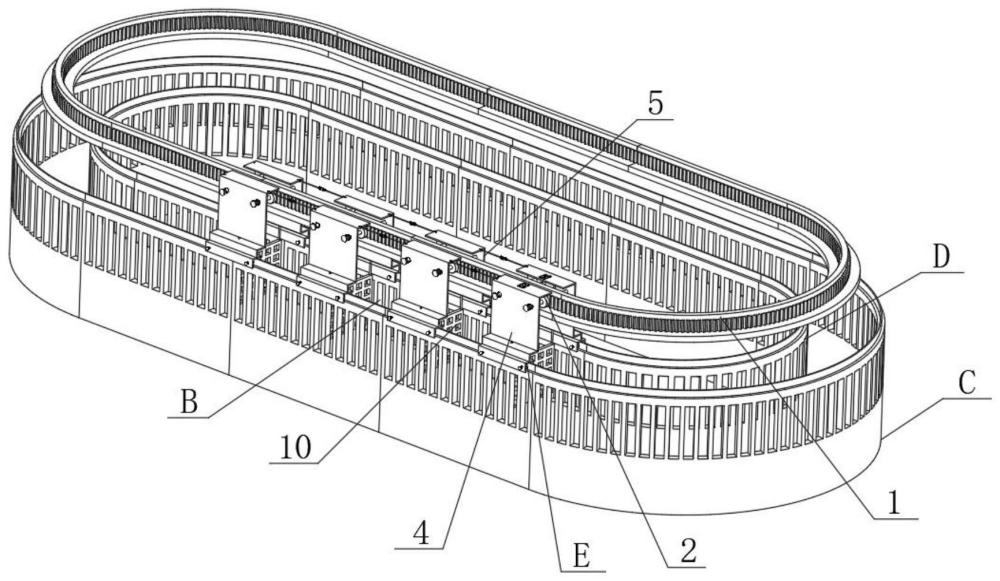
2、为实现以上目的,本发明的技术解决方案是:一种直道及弧道结合式遛马系统,所述直道及弧道结合式遛马系统包括滑轨、外环道与内环道;
3、所述内环道设置在外环道的内侧,外环道与内环道之间的区域为遛马区,滑轨设置在遛马区的上方,所述滑轨的顶部与主驱动机构滑动配合,若干个从动机构与滑轨的顶部滑动配合,主驱动机构与最前侧的从动机构之间通过连接组件连接,所有的从动机构之间通过连接组件连接;
4、所述主驱动机构的左侧下端与左吊臂的顶部连接,主驱动机构的右侧下端与右吊臂的顶部连接,所有的左吊臂、右吊臂上均插接有安装杆,安装杆的底部连接有吊拍,所有从动机构的左侧下端与左吊臂的顶部连接,从动机构的右侧下端与右吊臂的顶部连接,左吊臂、右吊臂的下端均设置有滑动组件,左吊臂上的滑动组件与外环道上的外轨道滑动配合,右吊臂上的滑动组件与内环道上的内轨道滑动连接;
5、所述左吊臂与右吊臂的结构相同,对称设置;
6、所述连接组件包括一连接环、二连接环与三连接环,所述一连接环安装在主驱动机构的顶部后端,二连接环安装在位于主驱动机构后方设置从动机构的前端,一连接环的侧围与一连接杆的一端连接,一连接杆的另一端与三连接环的侧围连接,三连接环的另一侧与二连接杆的一端连接,二连接杆的另一端与二连接环的侧围连接;
7、所述滑轨包括横轨、纵轨与齿条,横轨的顶部中央与纵轨的底部连接,纵轨的顶部向上延伸设置,纵轨的左右两侧安装有齿条;
8、所述主驱动机构包括左安装板、右安装板、左滑轮与右滑轮,左安装板的侧面与左吊臂的顶部连接,左安装板上安装有左电机, 左电机的输出轴与左联轴器连接,左联轴器的底端贯穿左安装板后与左齿轮连接,左齿轮与左侧的齿条啮合,横轨的顶部位于纵轨的左侧滑动配合有两个左滑轮,左齿轮位于两个左滑轮之间,每个左滑轮的左侧均与左移动轴的一端连接,左移动轴的另一端贯穿左吊臂后与左限位盘的一侧连接,左移动轴的侧围位于左限位盘与左吊臂之间套设有左弹簧,左弹簧的左右两侧分别与左限位盘、左吊臂的侧面连接;
9、所述右安装板的侧面与右吊臂的顶部连接,右安装板上安装有右电机, 右电机的输出轴与右联轴器连接,右联轴器的底端贯穿右安装板后与右齿轮连接,右齿轮与右侧的齿条啮合,横轨的顶部位于纵轨的右侧滑动配合有两个右滑轮,右齿轮位于两个右滑轮之间,每个右滑轮的右侧均与右移动轴的一端连接,右移动轴的另一端贯穿右吊臂后与右限位盘的一侧连接,右移动轴的侧围位于右限位盘与右吊臂之间套设有右弹簧,右弹簧的左右两侧分别与右限位盘、右吊臂的侧面连接。
10、所述右吊臂包括一竖板与一横板,一竖板的底部与一横板的侧面连接,一横板的顶部开设有通孔,通孔内插接有安装杆,安装杆的下端与吊拍的顶部连接;
11、所述一横板的侧面与二竖板的顶部连接,二竖板的底部与二横板的顶部连接,二横板的左右两端分别与两个三竖板的侧面连接,滑动组件贯穿设置在三竖板的侧面。
12、所述滑动组件包括传动杆、滚轮与弹簧圈,所述传动杆的一端贯穿下三竖板上的安装孔后与滚轮的一侧连接,滚轮的另一侧分别与外轨道、内轨道滑动配合,传动杆的另一端与限位盘的一侧连接,下二竖板的侧面与限位盘之间设置有弹簧圈。
13、所述滚轮的直径大于限位盘的直径,限位盘的直径大于弹簧圈的直径,弹簧圈的直径大于安装孔的直径;
14、所述传动杆沿安装孔横向往复运动。
15、所述吊拍位于遛马区内,所述吊拍的正面开设有多个观察通孔,所有的观察通孔呈矩形状均匀分布在吊拍的正面上。
16、所述从动机构包括两组对称设置的左从动轮与右从动轮、左从动杆与右从动杆以及左从安装板与右从安装板,左从安装板的侧面与左吊臂的顶部连接,所有的左从动轮、右从动轮均与横轨滑动配合,所有左从动轮的左端与左从动杆的一端连接,左从动杆的另一端贯穿左吊臂后与左圆盘的侧面连接;
17、所述右从安装板的侧面与右吊臂的顶部连接,所有右从动轮的右端与右从动杆的一端连接,右从动杆的另一端贯穿右吊臂后与右圆盘的侧面连接。
18、所述左从动杆的侧围位于左圆盘与左吊臂之间套设有左从弹簧,左从弹簧的左右两侧分别与左圆盘、左吊臂的侧面连接;
19、所述右从动杆的侧围位于右圆盘与右吊臂之间套设有右从弹簧,右从弹簧的左右两侧分别与右圆盘、右吊臂的侧面连接。
20、所述左圆盘的直径大于左从弹簧的外径。
21、所述左安装板的顶部开设有滑槽,滑槽的内壁左右两端之间设置有两个滑杆,两个滑杆上滑动连接有滑块,滑块的侧围与滑槽的内壁滑动配合;
22、每个所述滑杆的侧围上分别套设有一往复弹簧、二往复弹簧,一往复弹簧位于滑块的左侧,二往复弹簧位于滑块的右侧;
23、所述滑块的顶部安装有安装槽,左电机安装在安装槽内。
24、所述外环道包括一弧形端、一直线端、二弧形端与二直线端,所述一弧形端的一端与一直线端的一端连接,一直线端的另一端与二弧形端的一端连接,二弧形端的另一端与二直线端的一端连接,二直线端的另一端与一弧形端的另一端连接;
25、所述内环道包括内一弧形端、内一直线端、内二弧形端与内二直线端,所述内一弧形端的一端与内一直线端的一端连接,内一直线端的另一端与内二弧形端的一端连接,内二弧形端的另一端与内二直线端的一端连接,内二直线端的另一端与内一弧形端的另一端连接;
26、所述外环道包括上栅栏与下挡板,上栅栏的底部与下挡板的顶部连接。
27、与现有技术相比,本发明的有益效果为:
28、1、本发明一种直道及弧道结合式遛马系统中,所有的从动机构与滑轨的顶部滑动配合,主驱动机构与最前侧的从动机构之间通过连接组件连接,所有的从动机构之间通过连接组件连接,应用时,当需要进行遛马时,启动电机带动左齿轮、右齿轮转动,左齿轮、右齿轮与齿条的啮合从而带动左吊臂、右吊臂沿着横轨的左右两端往复运动,移动的同时,左滑轮、右滑轮沿着横轨滑行,在连接组件的作用下,主驱动机构会带动从动机构进行同步运动,而从动机构中的左从动轮、右从动轮也会沿着横轨滑行,左吊臂、右吊臂上的滑动组件在外环道、内环道上辅助移动,移动的稳定性更强,吊拍设置在遛马区内,遛马区设置在外环道、内环道之间,从而带动吊拍进行转动,从而敦促马匹在遛马区中进行运动,而当马匹不走时,后方的吊拍会驱赶马匹进行运动,而左吊臂与外环道垂直设置,右吊臂与内环道垂直设置,保证了稳定性更好,随着驱动机构的运动同步移动,吊拍不会发生抖动,不会惊吓到马匹。因此,本设计稳定性较强,吊拍不会抖动惊吓马匹。
29、2、本发明一种直道及弧道结合式遛马系统中,主驱动机构的左侧下端与左吊臂的顶部连接,主驱动机构的右侧下端与右吊臂的顶部连接,所有的左吊臂、右吊臂上均插接有安装杆,安装杆的底部连接有吊拍,前后两个吊拍之间构成遛马区,左吊臂上的滑动组件与外环道上的外轨道滑动配合,右吊臂上的滑动组件与内环道上的内轨道滑动连接,应用时,不需要在场地中央设置电机以及支架进行驱动,本设计直接将驱动左右两个吊臂的主驱动机构、从驱动机构与左右吊臂同向设置,将左右吊臂设置在对应的外环道与内环道上,不需要在内环道的正中央设置电机,从而解放了内环道的内部空间,其空闲的内部空间可以放置物品、训练人员或景观等等,空间利用率更好。因此,本设计可以使得马匹在遛马区进行遛马训练,解放了内环道的内部空间。
30、3、本发明一种直道及弧道结合式遛马系统中,连接组件包括一连接环、二连接环与三连接环,所述一连接环安装在主驱动机构的顶部后端,二连接环安装在位于主驱动机构后方设置从动机构的前端,一连接环的侧围与一连接杆的一端连接,一连接杆的另一端与三连接环的侧围连接,三连接环的另一侧与二连接杆的一端连接,二连接杆的另一端与二连接环的侧围连接,应用时,在移动到转弯的位置时,安装孔上的一连接环会沿着安装孔的空隙以及左吊臂的边沿进行活动转向,一连接杆另一端上的四连接环也可以沿着三连接环的内环进行位置转动调节,使得一连接环、一连接杆与四连接环之间可以任意活动,连接孔上的二连接环以及五连接环同样可以任意转动,五连接环、二连接杆、二连接环之间可以任意活动,可以使得主驱动机构带动从动机构转弯时更加的顺畅,硬质的一连接杆、二连接杆运动时不会发生阻滞以及回弹的问题。因此,本设计转弯方便,移动顺畅。
31、4、本发明一种直道及弧道结合式遛马系统中,左从动杆的侧围位于左圆盘与左吊臂之间套设有左从弹簧,左从弹簧的左右两侧分别与左圆盘、左吊臂的侧面连接,应用时,在转弯时,所有的左弹簧向左拉伸,所有的右弹簧向左压缩,弹簧可以随着偏转、随转弯的角度,随时改变弹簧的长度进行适应,直至最终移动到直线轨道上后,自动复位,右转弯时弹簧的伸缩轨迹相反,从动机构上的弹簧同步运动,从而使得本设计能适用于直线、弧线轨道。因此,本设计移动安全,转动方便。
32、5、本发明一种直道及弧道结合式遛马系统中,左安装板的顶部开设有滑槽,滑槽的内壁左右两端之间设置有两个滑杆,两个滑杆上滑动连接有滑块,滑块的侧围与滑槽的内壁滑动配合;每个滑杆的侧围上分别套设有一往复弹簧、二往复弹簧,一往复弹簧位于滑块的左侧,二往复弹簧位于滑块的右侧;滑块的顶部安装有安装槽,左电机安装在安装槽内,应用时,在装置进行左转向时,滑块会沿着滑槽向左移动,此时滑块会压缩滑杆左侧的一往复弹簧,使得左电机会随着主驱动机构同步进行发生偏转,右转向时滑块反向压缩二往复弹簧,直至最终移动到直线轨道上后,自动复位,可以保证电机随着整个装置同步进行转向,移动调节更加的稳定与安全。因此,本设计电机可以同步进行角度偏转调节,移动时更加稳定安全。
33、6、本发明一种直道及弧道结合式遛马系统中,滑动组件包括传动杆、滚轮与弹簧圈,传动杆的一端贯穿下二竖板上的安装孔后与滚轮的一侧连接,滚轮的另一侧分别与外轨道、内轨道滑动配合,传动杆的另一端与限位盘的一侧连接,下二竖板的侧面与限位盘之间设置有弹簧圈,应用时,移动到需要向左转弯时,移动路径发生偏转,左吊臂上的滑动组件上的弹簧圈向左拉伸,右侧滑动组件上的弹簧圈同步向左压缩,右吊臂上滑动组件的弹簧圈也向左拉伸,由于外环道的弧度大于内环道的弧度,使得左吊臂上弹簧圈形变量大于右吊臂上弹簧圈形变量,右转弯时与左转弯的方向相反,弹簧圈可以随着这种偏转、随转弯的角度,随时改变弹簧圈的长度进行适应,直至最终移动到直线轨道上后,自动复位。因此,本设计移动顺畅,适应多种不同的轨道。
34、7、本发明一种直道及弧道结合式遛马系统中,外环道包括上栅栏与下挡板,上栅栏的底部与下挡板的顶部连接,吊拍的正面开设有多个观察通孔,吊拍的观察通孔在滑轨下方,以及马匹正前方,使得马匹沿着吊拍的方向进行运动,设置的观察通孔能提高通气效果,避免马匹不安,又能提升观察效果,多个观察通孔也能更方便的观察马匹的状态。因此,本设计观察方便,通风效果好。
- 还没有人留言评论。精彩留言会获得点赞!