悬垂式果品经济林多功能表型监测及采收作业平台和方法
本发明属于机械工程领域,具体是一种悬垂式果品经济林多功能表型监测及采收作业平台和采收方法,本发明适用于对不同种类、不同冠幅、不同树形的果树进行表型信息监测及林果采摘与收集作业。
背景技术:
1、植物表型是指特定环境条件下受基因和环境共同作用影响所表现出的形态特征和可观察的性状,包括根茎、叶片、果实等的形态结构,也包括植物的生长习性、发育周期、花期等生物学特征。
2、在果品经济类生长过程中,传统作业方式进行果实采摘前通常依赖于人工观察,根据经验判断,这种方法耗时耗力且容易受主观因素的影响。然而,随着技术的不断进步,利用成像传感器采集图像提取植物表型信息进行果实成熟度识别成为了可能。通过分析果实的外部表型特征,如纹理、颜色、大小、形状等,可以准确评估果实的成熟度。基于分析成像传感器采集的图像提取出植物表型信息,从而提供客观、可量化的数据,消除人工主观判断的不确定性,并提高果实成熟度识别的准确性和一致性。同时,自动化的图像处理和机器学习算法可以快速处理大量果实图像数据并进行快速而准确的成熟度评估,大大提高果实检测和采摘收集的效率,减少人工劳动力的需求,降低成本。
3、现有的机械化林果采收方式主要有振动式、剪切式、摇摆式、吸附式等,通过多种机械化的方式使果实从树上脱落,从而解决人工采收成本高、效率低等问题。然而,针对果实采摘的现有机械化作业方式仍存在一些挑战,振动式采摘机械适用于大规模树上果实采摘,但可能导致果实受损,尤其是果皮损伤;摇摆式采摘机械适用于树上和灌木丛中的果实采摘,但效率相对较低;剪切式采摘机械适用于特定果实类型的采摘,但对果实的要求较高,不适用于脆弱果实和生长在复杂位置环境下果实的采摘;吸附式采摘机械具有保持果实完整性、高效采摘和适应性强的优点,但对果实表面的平整度、干燥度、光滑度等有一定要求,并需要适当的调整和维护。
4、现有的梳刷式采摘专利大多只实现了对果实的梳刷采收工作,并未与植物表型相结合,实现林果的智能化、精准化采收。例如发明专利“一种振动式蓝莓采摘设备(cn115443806a)”、“旋转拍打式蓝莓自动采摘机(cn109874505a)”只是实现了传统化对整棵果树中果实的采收工作,但未涉及对林果的表型监测以实现针对于成熟林果的采收作业,未能避免传统采摘机构对于成熟与未成熟林果的同时采摘;而专利“一种气力辅助式浆果精确采收装置和方法(cn109743961a)”,虽然结合了机器视觉实现了浆果位置以及密度的识别,但也仅仅只是用于控制采摘机构的位置以及气流的强度,实现较好的采摘效果,仍属传统机械采摘设备,并没有实现植物表型信息与采摘平台的有效联动。
技术实现思路
1、本发明所要解决的技术问题是针对上述现有林果采摘机械存在的问题提供一种悬垂式果品经济林多功能表型监测及采收作业平台和采收方法,本平台和采收方法通过植物表型监测模块对经济林中的果树进行表型信息的监测,然后再根据表型信息进行采摘、收集、果叶分离以及分级;与传统采摘机械相比,可根据不同经济林果树中林果的成熟情况进行采集,降低了实际生产中未成熟林果与成熟林果同时采摘产生的种植成本与运输成本,同时解决了人工判断林果成熟度时可能存在的主观性大、误差大的问题,提高了生产效益。
2、为实现上述技术目的,本发明采取的技术方案为:
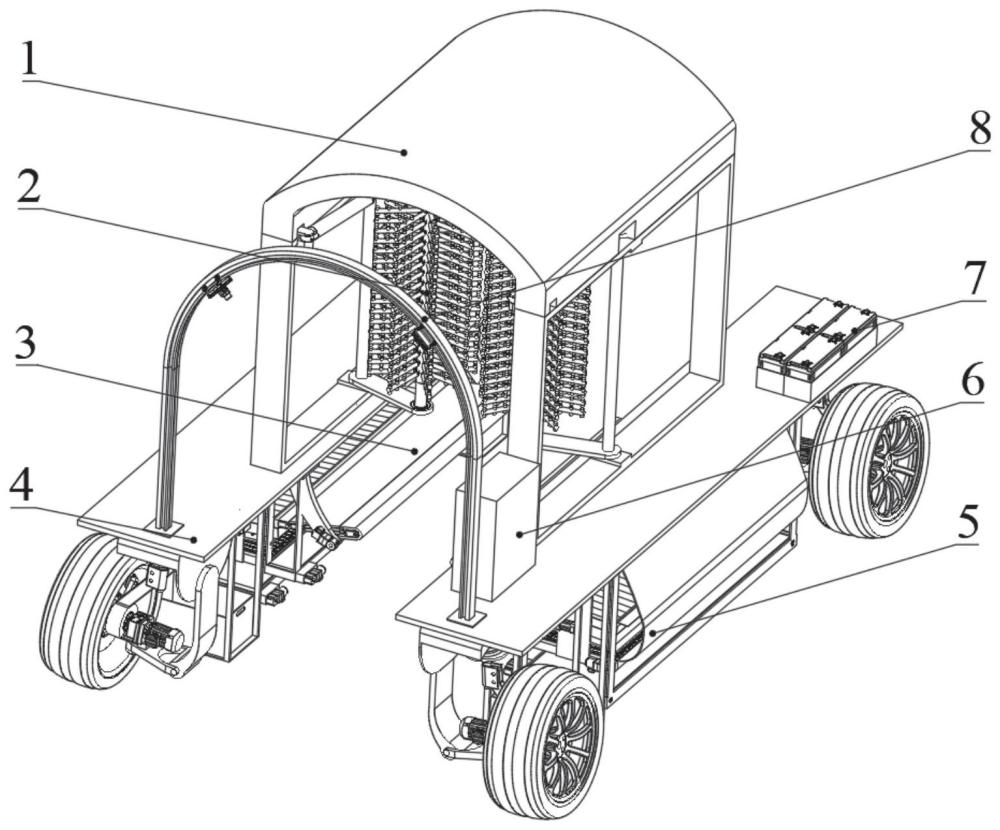
3、一种悬垂式果品经济林多功能表型监测及采收作业平台,包括车体框架、多角度梳刷采摘模块、林果伸缩收集模块、自走式底盘、筛叶分级集果模块、植物表型控制箱、蓄电池模组和植物表型监测模块;
4、所述车体框架、林果伸缩收集模块、筛叶分级集果模块、植物表型控制箱、蓄电池模组和植物表型监测模块均与自走式底盘连接,多角度梳刷采摘模块与车体框架连接;
5、所述蓄电池模组同时与多角度梳刷采摘模块、林果伸缩收集模块、自走式底盘、筛叶分级集果模块、植物表型控制箱、蓄电池模组和植物表型监测模块电连接,所述植物表型监测模块与植物表型控制箱电连接,所述植物表型控制箱同时与多角度梳刷采摘模块、林果伸缩收集模块和筛叶分级集果模块电连接;
6、所述植物表型监测模块用于多角度采集植物图像并发送植物图像至植物表型控制箱;
7、植物表型控制箱用于根据植物表型监测模块采集的图像进行表型参数分析;
8、多角度梳刷采摘模块用于在植物表型控制箱的控制指令下进行果实采摘;
9、林果伸缩收集模块用于在植物表型控制箱的控制指令下调整自身伸缩长度进而对多角度梳刷采摘模块采摘的果实进行收集;
10、筛叶分级集果模块用于在植物表型控制箱的控制指令下对收集的果实与树叶进行分离且对果实进行分级收集;
11、蓄电池模组用于为多角度梳刷采摘模块、林果伸缩收集模块、自走式底盘、筛叶分级集果模块、植物表型控制箱、蓄电池模组和植物表型监测模块供电。
12、作为本发明进一步改进的技术方案,所述的自走式底盘包括左自走式底盘和右自走式底盘,左自走式底盘和右自走式底盘为分离结构且为对称结构;所述车体框架包括左支架、右支架和顶棚,所述左支架固定连接在左自走式底盘上,右支架固定连接在右自走式底盘上,左支架与右支架的顶部通过顶棚固定连接。
13、作为本发明进一步改进的技术方案,所述的多角度梳刷采摘模块、林果伸缩收集模块和叶分级集果模块均有两个,且两个多角度梳刷采摘模块为对称结构,两个林果伸缩收集模块为对称结构,两个叶分级集果模块为对称结构,其中一个多角度梳刷采摘模块、林果伸缩收集模块和叶分级集果模块设置在左自走式底盘上,另一个多角度梳刷采摘模块、林果伸缩收集模块和叶分级集果模块设置在右自走式底盘上。
14、作为本发明进一步改进的技术方案,所述多角度梳刷采摘模块包括采摘电机、联轴器、采摘传动轴、传动轴固定板、第一锥齿轮、第二锥齿轮、多角度梳刷主体、下固定板、梳刷固定轴、液压杆固定座、液压杆、上固定板和销块;所述梳刷固定轴与车体框架固定连接,上固定板与梳刷固定轴的顶部转动连接,下固定板与梳刷固定轴的底部转动连接,采摘电机和传动轴固定板均固定连接在上固定板上,采摘电机的输出端通过联轴器与采摘传动轴的一端固定连接,采摘传动轴与传动轴固定板转动连接,采摘传动轴的另一端与第一锥齿轮固定连接,第一锥齿轮与第二锥齿轮啮合连接,第二锥齿轮与多角度梳刷主体的顶部固定连接,多角度梳刷主体与上固定板转动连接,多角度梳刷主体与下固定板转动连接,液压杆固定座与车体框架固定连接,液压杆与液压杆固定座转动连接,液压杆的伸缩端与销块的一端固定连接,销块的另一端与上固定板转动连接。
15、作为本发明进一步改进的技术方案,所述多角度梳刷主体包括梳刷轴筒、梳刷杆、梳刷导向轴、梳刷导向套筒和电动伸缩杆;
16、所述梳刷杆的一端与梳刷导向套筒转动连接,梳刷杆沿梳刷导向套筒周向圆周阵列分布,同时沿梳刷导向套筒轴向线性阵列分布,梳刷导向套筒的底部与电动伸缩杆的伸缩端固定连接,电动伸缩杆的伸缩端与梳刷导向轴的底部设有间隙,梳刷导向套筒套在梳刷导向轴的外部且梳刷导向套筒可沿梳刷导向轴上下滑动,梳刷轴筒套在梳刷导向套筒的外部且梳刷导向套筒可沿梳刷轴筒上下滑动,梳刷轴筒上开设有呈周向圆周阵列分布且呈轴向线性阵列分布的条形开槽,所述梳刷杆的一端贯穿条形开槽后与梳刷导向套筒转动连接,所述梳刷导向轴的顶部固定连接有补充轴杆,补充轴杆与梳刷轴筒的顶部固定连接,所述电动伸缩杆外部设有外壳,外壳与梳刷轴筒的底部固定连接,外壳的底部与下固定板转动连接,补充轴杆的顶部与上固定板转动连接后,再与第二锥齿轮固定连接。
17、作为本发明进一步改进的技术方案,所述林果伸缩收集模块包括收集架、橡胶卷、第一收集电机、第一电动伸缩气缸、第二电动伸缩气缸、第二收集电机、第一滚轴和第二滚轴;
18、所述收集架包括收集板架以及与收集板架的两侧分别固定连接的两个收集支架,所述收集支架的顶部与自走式底盘连接,第一电动伸缩气缸和第二电动伸缩气缸均与收集板架固定连接,第一电动伸缩气缸和第二电动伸缩气缸的伸缩端分别与第一滚轴的两端转动连接,第一收集电机和第二收集电机均与收集支架固定连接,第一收集电机和第二收集电机的输出端分别与第二滚轴的两端连接,第二滚轴的两端与收集支架转动连接,橡胶卷一端与收集板架连接,另一端与第二滚轴连接,橡胶卷通过第一滚轴缠绕在第二滚轴上;
19、所述收集板架和橡胶卷为倾斜状态,面向筛叶分级集果模块的一侧的高度低于远离筛叶分级集果模块的一侧。
20、作为本发明进一步改进的技术方案,所述自走式底盘中的左自走式底盘包括左后电机驱动轮、左前电机驱动轮和左底盘,左底盘的底部设置有左后电机驱动轮和左前电机驱动轮;所述自走式底盘中的右自走式底盘包括右后电机驱动轮、右前电机驱动轮和右底盘,右底盘405的底部设置有右后电机驱动轮、右前电机驱动轮。
21、作为本发明进一步改进的技术方案,所述筛叶分级集果模块包括筛叶分级支架、传送弯管、次级果传送装置、次级果收集箱、优质果收集箱、优质果传送装置、筛叶机构和分果机构;
22、所述筛叶分级支架与自走式底盘连接,传送弯管一端与自走式底盘连接,另一端与分果机构连接,次级果传送装置、次级果收集箱、优质果收集箱、优质果传送装置均通过支架与自走式底盘连接;
23、所述筛叶机构包括偏心电机、振动杆、筛叶模块和滑动模组,筛叶模块包括第一筛叶电机、第一传动链、筛选杆、筛叶框架、第二筛叶电机、第二传动链和横流风机;所述筛叶框架包括上层的筛选杆框架和下层的横流风机框架,筛选杆框架和横流风机框架固定连接;多根筛选杆的两端与筛选杆框架转动连接且沿筛选杆框架线性阵列分布;其中所有奇数的筛选杆左端通过第一传动链传动连接,且一个奇数的筛选杆左端与第一筛叶电机的输出端连接,第一筛叶电机固定连接在筛选杆框架上;其中所有偶数的筛选杆右端通过第二传动链传动连接,且一个偶数的筛选杆右端与第二筛叶电机的输出端连接,第二筛叶电机固定连接在筛选杆框架上;所述偏心电机固定连接在筛叶分级支架上,偏心电机的输出端与振动杆的一端转动连接,振动杆的另一端与筛叶框架转动连接;横流风机连接在所述横流风机框架上,且位于筛选杆下方,所述横流风机框架的底部与滑动模组中的滑块固定连接,滑动模组中的滑轨与筛叶分级支架固定连接;
24、所述分果机构包括同步传动带、分果传动轴、分果电机、从动轴和分果框架,分果框架与筛叶分级支架固定连接,分果电机固定连接在分果框架上,分果电机的输出端与分果传动轴连接,分果传动轴和从动轴平行设置且分别转动连接在分果框架上,分果传动轴通过多根线性阵列分布的同步传动带与从动轴传动连接;
25、筛叶模块中的筛叶框架为倾斜状态,面向传送弯管的一侧的高度低于远离传送弯管的一侧;
26、传送弯管的另一端与分果机构中分果框架连接;优质果传送装置位于分果机构一侧,优质果收集箱位于优质果传送装置后侧;次级果传送装置位于分果机构的同步传动带下方,次级果收集箱位于次级果传送装置前侧。
27、作为本发明进一步改进的技术方案,所述植物表型监测模块包括u型导轨、第一智能识别小车模组和第二智能识别小车模组;
28、所述第一智能识别小车模组一包括第一自走式小车、第一成像传感器、第一智能调节光源和第一弹簧轮;所述第一成像传感器和第一智能调节光源连接在第一自走式小车上,第一自走式小车底部自带的小车驱动轮嵌入在u型导轨的两侧导轨中,且能在u型导轨的两侧导轨中移动;第一自走式小车的小车底盘的中部连接有第一弹簧轮,第一弹簧轮嵌入在u型导轨的中间导轨中,且能在u型导轨的中间导轨中移动;
29、所述第二智能识别小车模组二包括第二自走式小车、第二成像传感器、第二智能调节光源和第二弹簧轮,所述第二成像传感器和第二智能调节光源连接在第二自走式小车上,第二自走式小车底部自带的小车驱动轮嵌入在u型导轨的两侧导轨中,且能在u型导轨的两侧导轨中移动;第二自走式小车的小车底盘的中部连接有第二弹簧轮,第二弹簧轮嵌入在u型导轨的中间导轨中,且能在u型导轨的中间导轨中移动。
30、为实现上述技术目的,本发明采取的另一个技术方案为:
31、一种悬垂式果品经济林多功能表型监测及采收作业平台的采收方法,包括:
32、步骤1:蓄电池模组为多角度梳刷采摘模块、林果伸缩收集模块、自走式底盘、筛叶分级集果模块、植物表型控制箱、蓄电池模组和植物表型监测模块供电,植物表型监测模块中的第一智能调节光源和第二智能调节光源采集光照并根据光照信息判断是否需要补光,若需要,第一智能调节光源和第二智能调节光源调节自身光源发光从而进行补光,否则,第一智能调节光源和第二智能调节光源中的光源不发光;
33、步骤2:植物表型监测模块中的第一自走式小车和第二自走式小车沿着u型导轨进行移动,多角度采集果树图像,并将果树图像传送至植物表型控制箱,植物表型控制箱进行表型参数分析;
34、步骤3:植物表型控制箱根据分析出来的表型信息判断果树中果实成熟度是否达到采摘要求,若达到,植物表型控制箱发送控制指令至多角度梳刷采摘模块、林果伸缩收集模块和筛叶分级集果模块,否则,植物表型控制箱不发送控制指令;
35、步骤4:当多角度梳刷采摘模块接收到控制指令后,首先,植物表型控制箱控制采摘电机动作,采摘电机通过采摘传动轴带动多角度梳刷主体旋转,植物表型控制箱根据分析出来的果树的冠幅表型信息控制两个液压杆动作,液压杆的伸缩端通过销块带动上固定板移动,从而调节两个多角度梳刷主体之间的间距;其次,植物表型控制箱根据分析出来的表型信息判断果树树形,根据果树树形控制多角度梳刷主体中的电动伸缩杆动作,电动伸缩杆带动梳刷导向套筒上下滑动从而调节梳刷杆的角度;
36、步骤5:当林果伸缩收集模块接收到控制指令后,植物表型控制箱根据分析出来的果树的地径表型信息控制第一电动伸缩气缸、第二电动伸缩气缸、第一收集电机和第二收集电机动作,第一电动伸缩气缸和第二电动伸缩气缸带动第一滚轴移动,第一收集电机和第二收集电机带动第二滚轴转动,进而调节橡胶卷伸缩的距离,从而调节两个林果伸缩收集模块之间的间距;被多角度梳刷采摘模块采摘下来的果实和少量的果叶掉落至橡胶卷上,果实和果叶通过自身重力依次从橡胶卷和收集板架滚落至筛叶机构的筛选杆上;
37、步骤6:当筛叶分级集果模块接收到控制指令后,筛叶机构中,植物表型控制箱控制第一筛叶电机和第二筛叶电机动作,第一筛叶电机和第二筛叶电机驱动筛选杆两两以相反转动方向开始转动;同时,植物表型控制箱控制偏心电机和横流风机动作,偏心电机通过振动杆驱动筛叶机构中的筛叶模块振动,横流风机运转;果叶从筛选杆之间下落至横流风机框架内进而被横流风机吹出采收作业平台;果实通过自身重力从振动杆掉落至传送弯管中,通过传送弯管下落至分果机构中;分果机构中,分果电机通过分果传动轴驱动同步传动带移动,直径小于相邻两根同步传动带之间间距的果实掉落至下方的次级果传送装置上,次级果传送装置将果实传送至次级果收集箱内,直径大于相邻两根同步传动带之间间距的果实被同步传动带传送至一侧的优质果传送装置上,优质果传送装置将果实传送至优质果收集箱内,完成果实分级收集工作。
38、本发明与现有的技术比较,有如下有益效果:本发明中的悬垂式果品经济林多功能表型监测及采收作业平台满足不同品种、不同冠幅、不同树形的经济林林果的智能化、高效化、自动化监测及采收工作要求。通过植物表型监测模块采集待测果树中林果的果实大小、形状、颜色、纹理和果树冠幅、地径、分枝角等表型信息,并进行分析,从而判别林果的成熟度是否达到采摘要求,若达到采摘要求,则首先驱动多角度梳刷采摘模块根据果树冠幅调整梳刷轴之间的间距;其次判断果树树形,若为苹果等果树枝条与果树主干近乎水平的果树,则调整梳刷角度为水平位置,若为橘子等果树枝条与果树主干夹角较小的果树,则调整梳刷角度为向下倾斜,梳刷角度调节完成后进行采摘工作;同时根据提取的果树地径表型信息控制林果伸缩收集模块中伸缩的距离,对掉落的林果进行收集;最后,筛叶分级集果模块对掉落的林果及树叶进行筛叶分级工作,进而实现果叶的有效分离、优质果与次级果的有效分级、并分别传送到可更换收集箱中;若林果成熟度未达到采摘要求,则判断果树需要继续生长,保持表型监测,不进行后续采收作业,直至果实成熟为止。整个工作过程自动化、智能化程度高,极大地提高了林果的采摘效率,同时与现有采摘机械相比,本发明适合于不同高度、不同品种、不同冠幅的经济林果树进行林果采收工作,与传统采摘机械相比,本发明可根据不同经济林果树中林果的成熟情况进行采集,并根据果树的不同树形调整梳刷的角度进行采摘工作,减少了在采摘过程中对果树枝干的损伤,降低了实际生产中未成熟林果与成熟林果同时采摘产生的种植成本与运输成本,同时解决了人工判断林果成熟度时可能存在的主观性大、误差大的问题,提高了生产效益。本发明拥有植物表型监测模块对每株果树的林果成熟度进行判断,避免对未成熟的林果进行采摘;同时针对于不同品种林果采取不同的梳刷采摘角度,减少了采摘过程对于果树枝条的损伤;此外,本平台集成了果叶分离、林果分级、林果收集功能,实现了对于林果的初步处理,提高了生产效益,节省了后续林果处理的成本。
- 还没有人留言评论。精彩留言会获得点赞!