自主导航的玻璃温室绿色防控机器人及其喷洒消杀的方法
本发明涉及农业专用设备,尤其涉及一种自主导航的玻璃温室绿色防控机器人及其喷洒消杀的方法。
背景技术:
1、臭氧是高活性的气体,略溶于水,它还是一种强氧化剂,其氧化电位为2.07v。臭氧的强氧化性使其可迅速灭菌消毒,其消毒能力较佳,强于氯、二氧化氯及氯胺。在玻璃温室中可以通过喷洒臭氧水来消毒杀菌,以防治病虫害。在现有的喷洒方式中,臭氧水或其他农药的喷洒量通常由人工控制,容易发生喷洒过量对作物造成损害或喷洒不足导致消杀效果不佳的情况。
技术实现思路
1、本发明提供一种自主导航的玻璃温室绿色防控机器人及其喷洒消杀的方法,用以解决现有技术中喷洒量通常由人工控制,容易发生喷洒过量对作物造成损害或喷洒不足导致消杀效果不佳的问题。
2、第一方面,本发明提供一种自主导航的玻璃温室绿色防控机器人,包括:
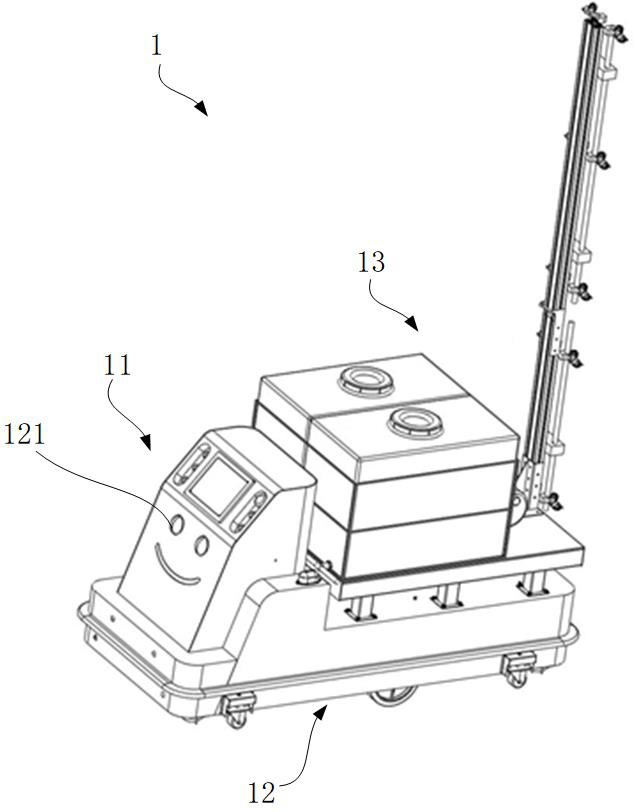
3、控制装置、移动装置和喷洒装置;
4、所述喷洒装置设置于所述移动装置上,所述移动装置上设置有检测传感器;所述控制装置包括:相互电连接的人机交互单元、移动控制单元、喷洒控制单元和计算单元;所述喷洒控制单元与所述喷洒装置电连接,所述检测传感器和所述计算单元电连接;
5、所述人机交互单元用于输入设定路线;
6、所述移动控制单元用于根据所述设定路线控制所述移动装置移动;
7、所述检测传感器用于在所述移动装置在沿所述设定路线移动的过程中,获取作物植株图像;
8、所述计算单元用于根据所述作物植株图像判断作物植株上是否存在病虫害,并确定病虫害面积和病虫害变色程度,在存在病虫害的情形下根据所述病虫害面积和所述病虫害变色程度,确定臭氧水的喷洒量,并根据所述作物植株图像确定存在病虫害的位置信息;
9、所述移动控制单元根据所述位置信息,控制所述移动装置和所述喷洒装置,使所述喷洒装置对准存在病虫害的作物植株;
10、所述喷洒控制单元用于根据所述喷洒量,控制所述喷洒装置对作物植株喷洒臭氧水以消杀病虫害。
11、根据本发明的自主导航的玻璃温室绿色防控机器人,所述控制装置还包括环境因子检测单元,所述环境因子检测单元和所述计算单元电连接,用于在所述移动装置在沿所述设定路线移动的过程中,获取检测温度、湿度和光照强度;
12、由于病虫害存在潜伏期,所述计算单元还用于在未发现病虫害的情形下,根据温度、湿度和光照强度,基于病虫害预测模型,确定臭氧水的所述喷洒量。
13、根据本发明的自主导航的玻璃温室绿色防控机器人,所述喷洒装置包括:储水桶、泵、水管、支架和喷头;
14、所述储水桶和所述支架设置在所述移动装置上;所述水管的一端通过所述泵和所述储水桶连通,另一端和所述喷头连通;所述水管的一端和所述喷头设置于所述支架上,所述泵与所述喷洒控制单元电连接。
15、根据本发明的自主导航的玻璃温室绿色防控机器人,所述喷洒装置包括多个所述喷头和至少一根所述水管,所述水管的一端设置于所述支架上,多个所述喷头沿所述水管间隔设置,并与所述水管连通。
16、根据本发明的自主导航的玻璃温室绿色防控机器人,所述储水桶内设置有浓度检测器和液位检测器,所述浓度检测器用于检测所述储水桶内臭氧水的浓度,所述液位检测器用于检测所述储水桶内的臭氧水的液位;
17、所述浓度检测器和所述液位检测器均与所述人机交互单元和所述移动控制单元电连接,
18、所述人机交互单元用于读取并显示所述储水桶内臭氧水的浓度和液位;
19、当所述储水桶内臭氧水的浓度低于浓度阈值和/或臭氧水的液位低于液位阈值,所述人机交互单元显示报警信息,所述移动控制单元控制所述移动装置停止。
20、根据本发明的自主导航的玻璃温室绿色防控机器人,所述移动装置的底部依次安装有前轨道轮组、差速轮组和后轨道轮组,所述差速轮组包括并排设置的第一差速轮和第二差速轮,用于在地面行驶时驱动所述移动装置前进或后退或转向;所述前轨道轮组包括并排设置的第一前轨道轮和第二前轨道轮,所述后轨道轮组包括并排设置的第一后轨道轮和第二后轨道轮,所述前轨道轮组和所述后轨道轮组用于在设置于所述设定路线上的轨道上驱动所述移动装置前进或后退;
21、在所述移动装置的底部还安装有用于对地面上的二维码进行识别的二维码读码器,用于根据二维码确定所述移动装置的位置和方向;
22、所述二维码读码器、所述第一差速轮、所述第二差速轮、所述前轨道轮组和所述后轨道轮组均与所述移动控制单元电连接。
23、第二方面,本发明还提供一种利用上述任一项所述自主导航的玻璃温室绿色防控机器人喷洒消杀的方法,包括:
24、根据作物植株的种植方式设置设定路线,控制移动装置沿设定路线移动;
25、在移动装置沿设定路线移动的过程中,获取作物植株图像和温度、湿度和光照强度;
26、根据作物植株图像判断是否存在病虫害,并基于作物植株图像和温度、湿度和光照强度,确定臭氧水的喷洒量以及植株位置;
27、需进行喷洒时,控制移动装置停止,并根据臭氧水喷洒量,控制喷洒装置对准作物植株进行喷洒。
28、根据本发明的自主导航的玻璃温室绿色防控机器人喷洒消杀的方法,所述根据作物植株图像判断是否存在病虫害,并基于作物植株图像和温度、湿度和光照强度,确定臭氧水的喷洒量以及植株位置的步骤,包括:
29、将作物植株图像和标准作物植株图像比较,判断作物植株上是否存在病虫害;
30、作物植株存在病虫害时,将作物植株图像和标准作物植株图像比较以确定喷洒位置并确定病虫害面积和病虫害变色程度,基于病虫害面积和病虫害变色程度,确定臭氧水的喷洒量和植株位置;
31、当未发现作物植株病虫害时,根据温度、湿度和光照强度,基于病虫害预测模型,确定臭氧水的喷洒量和植株位置。
32、根据本发明的自主导航的玻璃温室绿色防控机器人喷洒消杀的方法,在所述根据作物植株的种植方式设置设定路线,控制移动装置沿设定路线移动的步骤之前,包括:
33、选取作物植株样本并获取该样本的标准作物植株图像。
34、根据本发明的自主导航的玻璃温室绿色防控机器人喷洒消杀的方法,在所述根据作物植株的种植方式设置设定路线,控制移动装置沿设定路线移动的步骤之前,包括:
35、选取发生不同程度病虫害的作物植株样本,获取该样本的病虫害面积、病虫害变色程度和所处环境的温度、湿度和光照强度;
36、基于作物植株样本的病虫害面积、病虫害变色程度和温度、湿度和光照强度,建立病虫害预测模型。
37、本发明的自主导航的玻璃温室绿色防控机器人,通过设置人机交互单元方便用户自行设定自主导航的玻璃温室绿色防控机器人的工作路径,自主导航的玻璃温室绿色防控机器人能够适应各种不同布局的种植区域,充分满足用户需求;同时,通过设置检测传感器和计算单元,获取作物植株的图像并进行处理分析,从而判断作物植株是否产生病虫害,并确定病虫害面积和位置,根据病虫害面积计算最佳的臭氧水喷洒量,并通过移动控制单元和喷洒控制单元配合控制喷洒装置对准发生病虫害的作物植株进行喷洒,实现精准施药,使消杀效果更好,有效解决了喷洒量通常由人工控制,容易发生喷洒过量对作物造成损害或喷洒不足导致消杀效果不佳的问题。
- 还没有人留言评论。精彩留言会获得点赞!