一种高枝修剪机的制作方法
本技术涉及一种高枝修剪机,属于绿篱修剪设备。
背景技术:
1、针对离高压线较近或确已触碰到高压线的树冠,如不及时修剪,遇到刮风下雨天气极易引起漏电,严重影响用电安全。
2、一般,低矮灌木的修剪维护需要人工利用手动或电动的修剪刀或电锯完成,但是现有技术中的修剪刀、汽油修剪机、电动修剪机、电锯等长度有限,无法对较高树木的高枝进行修剪,因此在对较高树木的高枝进行修剪时,需要借助升降车或梯子进行修剪,导致劳动强度增大,人工成本增高且修剪效率低,且树枝倒下的方向不确定,砸伤到操作者的风险较高。
3、专利号为cn202210920621.6的专利申请,公开了一种园林灌木用高枝修剪装置,包括由下至上依次设置的电池模块、手臂固定部件、伸缩部件、固定部件和高枝剪切部件,整个园林灌木用高枝修剪装置是通过手臂贴合面板佩戴至工人的手臂上,让后通过伸缩部件实时调节高枝剪切部件的高度,工人通过挥动手臂带动高枝剪切部件对灌木的高枝进行修剪,通过本发明中的园林灌木用高枝修剪装置修剪灌木高枝时,不需要借助升降车或梯子进行修剪,提高了高枝修剪装置的适应性,降低了工人劳动强度,提高了灌木高枝的修剪效率低。
4、上述专利虽然可以实现灌木高枝的修剪功能,但目前技术考虑不全面,具有以下弊端:
5、无法实现锯切机构的工作高度按需调节,需要借助升降车或梯子进行修剪。
6、亟待一种高枝修剪机,实现锯切机构的工作高度按需调节,控制锯切机构到达指定切割位置时,锯盘驱动液压马达带动切割锯盘对树木的高枝进行修剪,不需要借助升降车或梯子进行修剪,提高了高枝修剪机的适应性,降低了工人劳动强度,提高了树木高枝的修剪效率,还可以避免登高作业的安全隐患,提高了修剪作业的安全系数。
技术实现思路
1、为解决上述问题之一,根据以上现有技术中的不足,本实用新型要解决的技术问题是:如何实现锯切机构的工作高度按需调节,控制锯切机构到达指定切割位置时,锯盘驱动液压马达带动切割锯盘对树木的高枝进行修剪,不需要借助升降车或梯子进行修剪,提高了高枝修剪机的适应性,降低了工人劳动强度,提高了树木高枝的修剪效率,还可以避免登高作业的安全隐患,提高了修剪作业的安全系数。
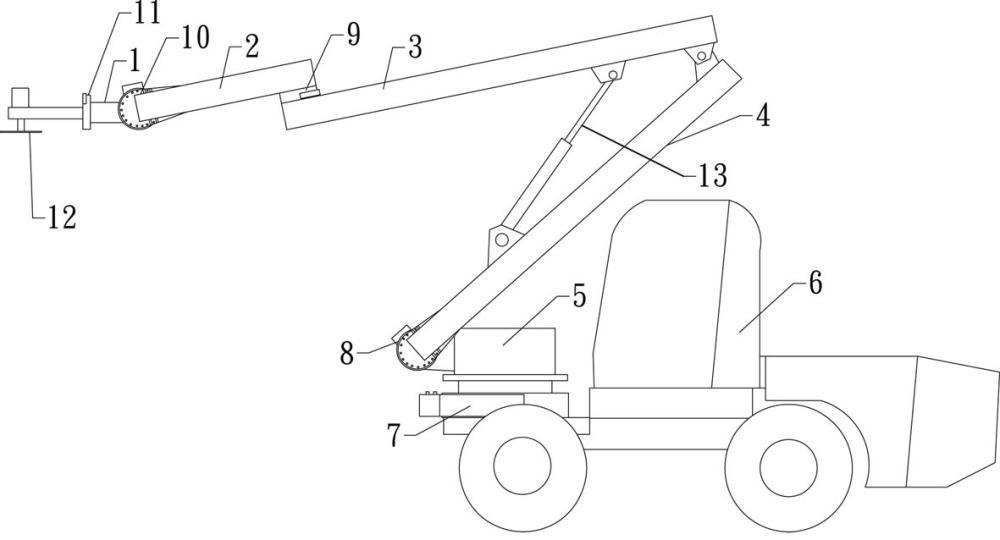
2、本实用新型所述的高枝修剪机,包括行走车身,其特征在于,所述行走车身的前端通过第一回转支承组件安装有支臂,所述支臂的上部通过第二回转支承组件安装有立臂,所述立臂的另一端铰接有大臂,所述大臂和立臂之间设置有能够改变大臂翻转角度的翻转驱动器,翻转驱动器使得所述大臂与立臂之间的角度改变,所述大臂的另一端通过第三回转支承组件安装有后小臂,所述后小臂的另一端通过第四回转支承组件安装有前小臂,所述前小臂的前端通过第五回转支承组件安装有锯切机构。
3、锯切机构的马达安装架与前小臂同轴设置,在第五回转支承组件的作用下实现自转调节,以改变锯切机构的锯切工作方向,利用锯切机构对高空树枝进行修剪(截断);
4、控制第四回转支承组件旋转能够驱动前小臂相对于后小臂上下摆动,改变前小臂的翻转角度,第四回转支承组件使得所述前小臂在竖平面内相对于后小臂旋转,两者之间的角度随之改变;
5、控制第三回转支承组件旋转能够驱动后小臂相对于大臂左右摆动,改变后小臂的翻转角度,第三回转支承组件使得所述后小臂在水平面内相对于大臂旋转,两者之间的角度随之改变;
6、控制调幅油缸能够改变后小臂的翻转角度,调幅油缸使得所述大臂在竖平面内相对于立臂旋转,两者之间的角度随之改变;
7、控制第二回转支承组件旋转能够驱动立臂相对于支臂上下摆动,改变立臂的翻转角度,第二回转支承组件使得所述立臂在竖平面内相对于支臂旋转,两者之间的角度随之改变;
8、控制第一回转支承组件旋转能够驱动支臂自转,改变侧面连接板的朝向,改变整体的工作方向。
9、工人在行走车身的驾驶室内,通过控制第一回转支承组件、第二回转支承组件、调幅油缸、第三回转支承组件、第四回转支承组件及第五回转支承组件,以改变锯切机的工作位置,锯切机构的工作高度可按需调节,控制锯切机构到达指定切割位置时,锯盘驱动液压马达带动切割锯盘对树木的高枝进行修剪,不需要借助升降车或梯子进行修剪,提高了高枝修剪机的适应性,降低了工人劳动强度,提高了树木高枝的修剪效率,还可以避免登高作业的安全隐患,提高了修剪作业的安全系数。
10、优选地,所述支臂包括支撑座,所述支撑座的底部设置有与第一回转支承组件连接的底部连接盘,所述支撑座的侧壁上设置有与第二回转支承组连接的侧面连接板,连接方便。
11、优选地,所述行走车身采用四驱行走车身,动力采用国三或国四柴油发动机。
12、优选地,所述翻转驱动器为调幅油缸,所述调幅油缸的一端铰接在立臂的中部,另一端铰接在大臂上,调幅油缸与大臂的铰接点靠近大臂与立臂的铰接点,控制调幅油缸能够改变后小臂的翻转角度,调幅油缸使得所述大臂在竖平面内相对于立臂旋转,两者之间的角度随之改变。
13、优选地,所述锯切机构包括与第五回转支承组件连接的马达安装架,所述马达安装架的另一端安装有锯盘驱动液压马达,所述锯盘驱动液压马达的动力输出轴上安装有切割锯盘,切割锯盘采用锯盘驱动液压马达直驱,动力强。
14、优选地,所述第一回转支承组件包括回转支承本体,所述回转支承本体通过其上配置的回转驱动件实现驱动,所述回转支承本体包括同轴可转动配合的内圈以及外圈,内圈与行走车身固定起支撑作用、外圈与支臂固定带动支臂相对于行走车身旋转,第一回转支承组件的回转角度范围为-90°至+90°。
15、优选地,所述第二回转支承组件的结构与第一回转支承组件的结构相同,回转角度范围为-90°至+90°。
16、优选地,所述第三回转支承组件的回转角度范围为-130°至+130°。
17、优选地,所述第四回转支承组件的回转角度范围为-130°至+130°。
18、优选地,所述第五回转支承组件的回转角度范围为-180°至+180°。
19、优选地,所述第一回转支承组件、第二回转支承组件、第三回转支承组件、第四回转支承组件、第五回转支承组件的回转驱动件均为液压马达,由同一液压站作为动力源控制。
20、与现有技术相比,本实用新型具有以下有益效果:
21、本实用新型所述的高枝修剪机,实现锯切机构的工作高度按需调节,控制锯切机构到达指定切割位置时,锯盘驱动液压马达带动切割锯盘对树木的高枝进行修剪,不需要借助升降车或梯子进行修剪,提高了高枝修剪机的适应性,降低了工人劳动强度,提高了树木高枝的修剪效率,还可以避免登高作业的安全隐患,提高了修剪作业的安全系数。
22、本实用新型所述的高枝修剪机,所述翻转驱动器为调幅油缸,所述调幅油缸的一端铰接在立臂的中部,另一端铰接在大臂上,该铰接点靠近大臂与立臂的铰接点,控制调幅油缸能够改变后小臂的翻转角度,调幅油缸使得所述大臂在竖平面内相对于立臂旋转,两者之间的角度随之改变。
23、本实用新型所述的高枝修剪机,高枝修剪机的大范围移动可以通过行走车身来完成,移动和操作更加方便,使高枝绿篱修剪作业变得更加省时省力。
24、本实用新型所述的高枝修剪机,通过控制第一回转支承组件、第二回转支承组件、调幅油缸、第三回转支承组件、第四回转支承组件及第五回转支承组件,改变前小臂、后小臂、大臂及立臂之间的位置关系,尽可能缩小前小臂、后小臂、大臂及立臂相互折叠后的占地面积。
- 还没有人留言评论。精彩留言会获得点赞!