一种茶叶苗种植机
1.本实用新型涉及农业机械技术领域,具体地说,是涉及一种茶叶苗种植机。
背景技术:
2.茶叶的种植需要一定的流程,主要包括松土、铺膜、挖洞、栽种、覆土压实、水肥灌溉等步骤,但目前这些茶叶苗的种植流程大部分都还是由人工操作完成,使得茶叶苗的种植效率并不是很高。基于此,为了有效提高茶叶苗的种植工作效率,有必要提供一种集旋耕松土、铺膜、挖洞、树苗栽种、覆土压实、水肥灌溉等功能为一体的茶叶苗种植设备。
技术实现要素:
3.本实用新型的目的在于提供一种茶叶苗种植机,可实现茶叶苗的机械化种植,代替绝大部分的人工种植工作,从而提高茶叶苗的种植效率。
4.为实现上述目的,本实用新型采用的技术方案如下:
5.一种茶叶苗种植机,包括机身,以及设置在机身上的行走机构、旋耕机构、铺膜机构、挖洞爪机构、茶叶苗放置机构、泥土压实灌溉机构和控制机构,其中:
6.行走机构,用于实现种植机移动;
7.旋耕机构,用于在种植机行走过程中对泥土进行旋耕松土;
8.铺膜机构,用于旋耕松土后对泥土进行铺膜;
9.挖洞爪机构,用于对铺膜后的泥土挖洞,以便栽种茶叶苗;
10.茶叶苗放置机构,用于将茶叶苗依次放入各个洞中;
11.泥土压实灌溉机构,用于栽种茶叶苗后,使泥土将茶叶苗的尾部覆盖并压实,同时对茶叶苗进行水肥灌溉;
12.控制机构,用于分别控制行走机构、旋耕机构、铺膜机构、挖洞爪机构、茶叶苗放置机构、泥土压实灌溉机构工作。
13.具体地,所述旋耕机构包括设置在机身底部前端的挡泥罩,设置在挡泥罩内的旋转轴,设置在挡泥罩内并同时与旋转轴和控制机构连接的旋耕电机,以逆时针方向均布在旋转轴上的旋耕叶片,以及转轴与挡泥罩连接、用于带动挡泥罩旋转的第一电机;所述第一电机与控制机构连接。
14.具体地,所述铺膜机构包括设置在机身底部中间的铺膜组件,以及设置在机身底部并位于铺膜组件与旋耕机构之间的覆土辊。
15.进一步地,所述铺膜组件包括薄膜放置滚筒,以及设置在薄膜放置滚筒下方并与之平行的铺膜滚筒。
16.具体地,所述挖洞爪机构包括设置在机身底部的第一机座,设置在第一机座上并与控制机构连接的第一伺服电动缸,与第一伺服电动缸的轴承连接的第二机座,设置在第二机座上并与控制机构连接的第二伺服电动缸,与第二伺服电动缸的轴承连接的连杆机构,以及与连杆机构连接并在第二伺服电动缸控制下由连杆机构带动打开或夹紧的挖爪。
17.具体地,所述茶叶苗放置机构包括设置在机身上方的茶叶苗放置框,一端与茶叶苗放置框连接的滑轮式传输带,设置在茶叶苗放置框上且转轴与滑轮式传输带的另一端连接、用于带动传输带工作的第二电机,以及设置在机身内并位于滑轮式传输带一端下方的落苗通道;所述第二电机与控制机构连接。
18.具体地,所述泥土压实灌溉机构包括设置在机身上的水肥养料罐,设置在机身内且进水口与水肥养料罐连通、出水口连接有输水管的水泵,以及安装在输水管端部并且倾斜设置的覆土板;所述水泵与控制机构连接。
19.作为优选,所述行走机构为履带式行走机构。
20.与现有技术相比,本实用新型具有以下有益效果:
21.(1)本实用新型通过设计一种茶叶苗种植机,利用行走机构、旋耕机构、铺膜机构、挖洞爪机构、茶叶苗放置机构、泥土压实灌溉机构和控制机构的相互配合,有针对性地在一套设备上可以实现旋耕松土、铺膜、挖洞、树苗栽种、覆土压实、水肥灌溉的操作流程,使得大部分的茶叶苗种植工作由人工操作转变机器操作,降低了人工劳动强度,并较好地提高了茶叶苗的种植效率。
22.(2)本实用新型中的旋耕机构,采用挡泥罩、旋转轴、旋耕叶片和电机的设计,不仅能对泥土进行松耕,而且通过控制挡泥罩的旋转,可带动旋耕叶片抬起或下放,从而控制其与泥土之间的接触面大小,实现泥土松耕厚度的控制,准确完成了旋耕松土的工作。
23.(3)本实用新型中的铺膜机构,采用薄膜放置滚筒、铺膜滚筒和覆土辊的设计,依靠种植机的行走,配合薄膜放置滚筒、铺膜滚筒二者反方向的转动,使得放置在薄膜放置滚筒上的薄膜能够较好地铺放至松土面上,再依靠覆土辊翻起的泥土对薄膜两侧进行压实,完成铺膜和泥土压紧工作。这种铺膜方式,操作方便,铺膜完成效率高,铺膜效果较好。
24.(4)在种植机移动过程中,利用茶叶苗放置机构和泥土压实灌溉机构在位置设置上的间隔差,本实用新型依次完成了茶叶苗在坑洞中的放置以及后续的覆土压实和灌溉操作,从而很好地实现了茶叶苗的机械化栽种。
附图说明
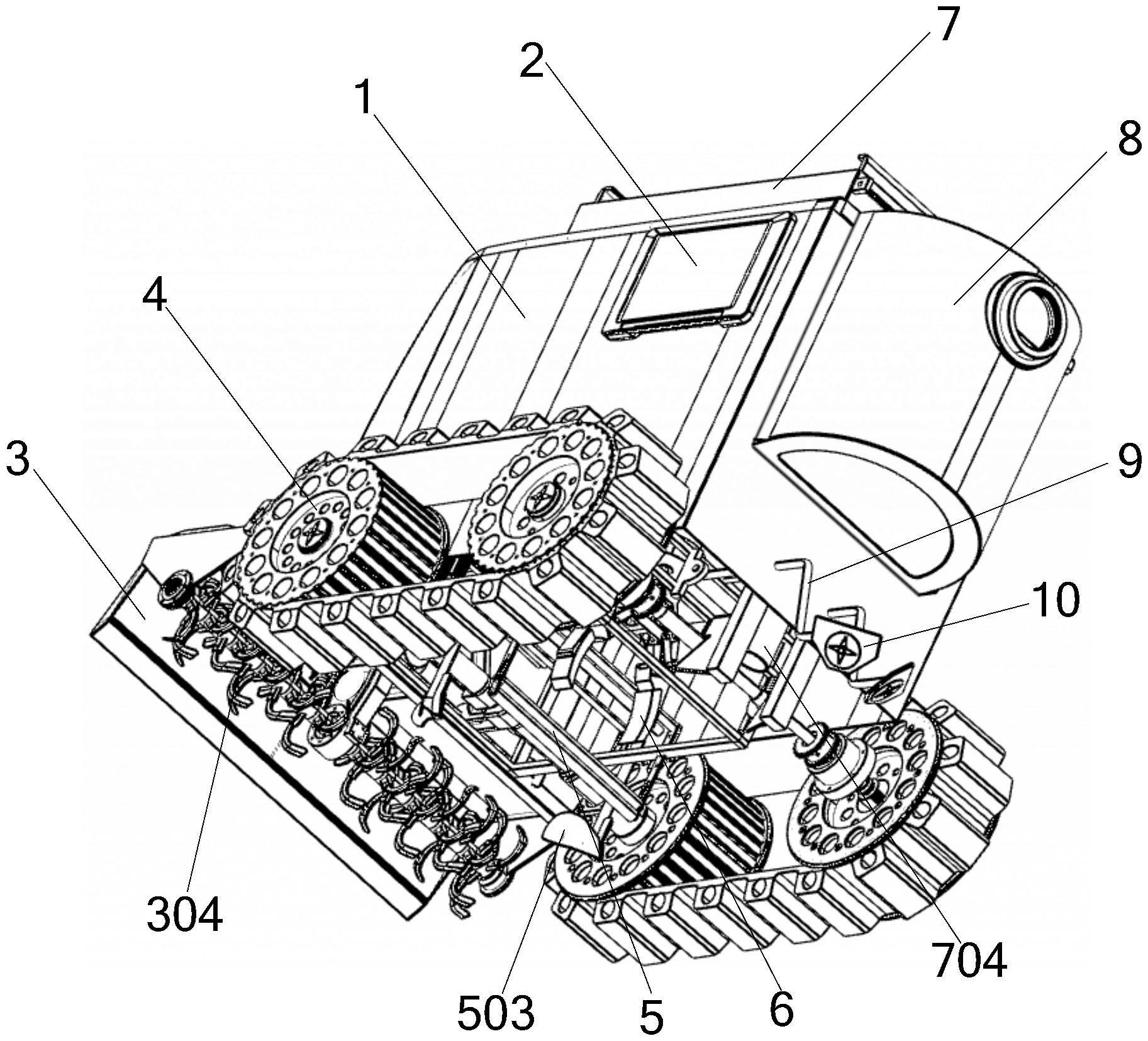
25.图1为本实用新型-实施例的结构示意图。
26.图2为本实用新型-实施例部分零部件的结构示意图。
27.图3为本实用新型-实施例中旋耕机构的结构示意图。
28.图4为本实用新型-实施例中铺膜机构的结构示意图。
29.图5为本实用新型-实施例中铺膜组件工作时的状态示意图。
30.图6为本实用新型-实施例中挖洞爪机构的结构示意图。
31.图7为本实用新型-实施例中茶叶苗放置机构的结构示意图。
32.图8为本实用新型-实施例中输水管与覆土板的连接示意图。
33.图9为本实用新型-实施例中控制机构的电路控制框图。
34.其中,附图标记对应的零部件名称为:
35.1-机身,2-控制机构,3-旋耕机构,301-挡泥罩,302-第一电机,303-旋转轴,304-旋耕叶片,305-旋耕电机,4-行走机构,5-铺膜机构,501-薄膜放置滚筒,502-铺膜滚筒,503-覆土辊,504-薄膜,6-挖洞爪机构,601-第一伺服电动缸,602-第二伺服电动缸,603-连
杆机构,604-挖爪,7-茶叶苗放置机构,701-茶叶苗放置框,702-滑轮式传输带,703-第二电机,704-落苗通道,8-水肥养料罐,9-输水管,10-覆土板。
具体实施方式
36.下面结合附图说明和实施例对本实用新型作进一步说明,本实用新型的方式包括但不仅限于以下实施例。
37.实施例
38.本实施例提供了一种茶叶苗种植机,用于实现茶叶苗的机械化种植,代替绝大部分的人工种植工作,从而提高种植效率。如图1~9所示,本实施例结构上主要包括机身1,以及设置在机身1上的行走机构4、旋耕机构3、铺膜机构5、挖洞爪机构6、茶叶苗放置机构7、泥土压实灌溉机构和控制机构2。
39.行走机构4用于实现种植机整体移动,本实施例采用履带式行走机构,与现有技术相同,主要由两组平行履带+诱导齿+控制及驱动装置+舵机等组成,采用人工或远程遥控方式控制,可实现行走、速度调节和转向的功能。本实施例在此对其具体结构和工作原理不做详细阐述。
40.本实施例的工作流程主要包括旋耕松土、树苗放置、覆土压实、水肥灌溉等几大步骤,其中,旋耕机构3用于在种植机行走过程中对泥土进行旋耕松土,这是种植茶叶苗需要做的第一步。如图1~3所示,本实施例中的旋耕机构3包括设置在机身1底部前端的挡泥罩301,设置在挡泥罩301内的旋转轴303,设置在挡泥罩301内并同时与旋转轴303和控制机构2连接的旋耕电机305,以逆时针方向均布在旋转轴303上的旋耕叶片304,以及转轴与挡泥罩301连接、用于带动挡泥罩旋转的第一电机302,该第一电机302与控制机构2连接。工作时,种植机在移动的同时,在控制机构2的控制下,旋耕电机305控制旋转轴303转动,带动旋耕叶片304转动,对泥土进行松耕。并且在松耕的过程中,可通过第一电机302的控制,带动挡泥罩旋转,从而控制旋耕叶片304与泥土之间的距离,进而控制泥土松耕的厚度。例如,挡泥罩301逆时针转动时,旋耕叶片304将朝着远离泥土的方向抬起,此时其与泥土之间的接触面积将变小,因而泥土松耕的厚度也将变小,反之,泥土松耕的厚度将变大。并且,将旋耕叶片304朝着远离泥土的方向抬起,直至二者不再接触,也避免了在旋耕松土结束后由于旋耕叶片与泥土接触给后续操作(例如铺膜、栽种等)带来不便。
41.在旋耕松土后,需要进行铺膜和薄膜压紧,此为茶叶苗种植需要做的第二步,对于本实施例所述的种植机来说,前行时,旋耕松土,然后以反方向前行时进行铺膜。本实施例采用铺膜机构5实现铺膜和压紧工作,如图1、4所示,铺膜机构5包括设置在机身1底部中间的铺膜组件,以及设置在机身1底部并位于铺膜组件与旋耕机构之间的覆土辊503。本实施例中的铺膜组件包括薄膜放置滚筒501和设置在薄膜放置滚筒501下方并与之平行的铺膜滚筒502。铺膜前,先将薄膜504放置于薄膜放置滚筒501上,薄膜504的揭开位置位于薄膜放置滚筒501与铺膜滚筒502之间,当种植机反向行走时,由于铺膜滚筒502与地面之间的摩擦力,铺膜滚筒502将做逆时针旋转,此时将带动薄膜和薄膜放置滚筒501做顺时针转动,从而使得薄膜504的揭口处跟随铺膜滚筒502转动而被铺放至地面上,整个动作状态与传统的滚轮传动基本相同,如图5所示。随着种植机的移动,在薄膜铺放至地面间隔几秒后,利用设置在后的两个覆土辊503铲起的泥土,将薄膜的两侧压实,如此循环,即可完成整个铺膜工作。
42.铺膜后,需要进行挖洞,以便栽种茶叶苗。本实施例采用挖洞爪机构6对铺膜后的泥土按预定间隔挖洞,如图1、6所示,挖洞爪机构6包括设置在机身1底部的第一机座,设置在第一机座上并与控制机构2连接的第一伺服电动缸601,与第一伺服电动缸601的轴承连接的第二机座,设置在第二机座上并与控制机构2连接的第二伺服电动缸602,与第二伺服电动缸602的轴承连接的连杆机构603,以及与连杆机构603连接并在第二伺服电动缸控制下由连杆机构带动打开或夹紧的挖爪604。需要挖洞时,在控制机构2的控制下,首先是第一伺服电动缸601控制第二机座下降,使挖爪604与地面接触并插入泥土中,然后控制第二伺服电动缸602开启,利用第二伺服电动缸602缸臂的上下移动,配合连杆机构603的传动,使挖爪604一开一关,即可将部分泥土抓住,然后由第一伺服电动缸601控制第二机座上升,带动挖爪604抬起,并随着种植机的行走而将抓着的泥土带离,这样此处就形成了一个坑洞。如此重复,完成多个坑洞的挖掘工作。
43.挖洞后,需要将茶叶苗依次放入各个洞中,本实施例采用茶叶苗放置机构7实现茶叶苗的栽种。如图1、7所示,茶叶苗放置机构7包括设置在机身1上方的茶叶苗放置框701,一端与茶叶苗放置框701连接的滑轮式传输带702,设置在茶叶苗放置框701上且转轴与滑轮式传输带702的另一端连接、用于带动传输带工作的第二电机703,以及设置在机身1内并位于滑轮式传输带702一端下方的落苗通道704;第二电机703与控制机构2连接。栽种茶叶苗时,首先移动种植机,使落苗通道704与坑洞对其,然后将茶叶苗放置框701中的茶叶苗取出,放置于滑轮式传输带702上。为确保茶叶苗掉入坑洞时的姿态是头部朝上的,应将茶叶苗横置于滑轮式传输带702,并将茶叶苗的头部向后。而后,通过控制机构2控制第二电机703启动,带动滑轮式传输带702工作,使得茶叶苗自滑轮式传输带702滑落至落苗通道704内,并最终在自身重力作用下掉入至坑洞内。
44.将茶叶苗放入坑洞内后,将进行最后的覆土和水肥灌溉工作。本实施例采用泥土压实灌溉机构实现茶叶苗的覆土和水肥灌溉,如图1、8所示,泥土压实灌溉机构包括设置在机身1上的水肥养料罐8,设置在机身1内且进水口与水肥养料罐连通、出水口连接有输水管9的水泵,以及安装在输水管9端部并且倾斜设置的覆土板10;水泵与控制机构2连接。在将茶叶苗栽种的同时,打开水肥养料罐8,使水肥经由输水管9输出。并且,由于种植机的移动,在茶叶苗放入坑洞内几秒后,设置在后的覆土板10将泥土翻动,使泥土对坑洞及茶叶苗的尾部进行覆盖、压实,同时,经由输水管9输出的水肥会对茶叶苗进行同步灌溉。最后,根据实际栽种情况,再通过人工对部分茶叶苗的姿态进行调整和加固,即可完成整个茶叶苗的种植。
45.控制机构2连接上述所述的各个电机和伺服电动缸,控制各个电机、伺服电动缸、水泵,实现协同工作。本实施例中的控制机构2采用现有应用成熟的控制系统,其中的处理芯片可采用stm32、stc系列的单片机或者dsp、mcu、fpga、小型plc等,然后将各个电机、伺服电动缸、水泵的控制信号输入端连接处理芯片的i/o口。图9为本实施例采用的一种控制机构的电路框图,包括型号为stm32f103的最小单片机系统以及电源模块和显示模块,其中,电源模块用于为各个部分进行供电,显示模块采用触摸屏设计,用于实现人机交互。电路框图中的各个模块均采用的现有电路结构,功能与现有技术相同,因此本实施例不再对每个模块进行详细介绍。
46.本实用新型通过合理的结构设计,结合现有应用成熟的电控设备,很好地实现了
茶叶苗种植的机械化操作。
47.按照上述实施例,便可较好的实现本实用新型。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1