基于机器视觉的全自动活体小龙虾分拣分级成套设备的制作方法
本技术涉及活体小龙虾分拣分级生产领域,具体涉及基于机器视觉的全自动活体小龙虾分拣分级成套设备。
背景技术:
1、小龙虾形似虾而甲壳坚硬。成体长约5.6~11.9厘米,整体颜色包括红色、红棕色、粉红色。背部是酱暗红色,两侧是粉红色,带有橘黄色或白色的斑点。甲壳部分近黑色,腹部背面有一楔形条纹。幼虾体为均匀的灰色,有时具黑色波纹。螯狭长。
2、随着小龙虾成为一道美食之后,小龙虾的产量需求越来越高,在小龙虾生产的过程中,很多的小龙虾厂家在对小龙虾进行处理花费的时间也越来越多,由于小龙虾的产量较大,人工处理很明显效率较低,而一引起小龙虾厂家采用机器对小龙虾依据重量分类分拣并不能满足对小龙虾的按照体重、大小分级与分类,也不能快速分类分拣,影响小龙虾进行分拣效率。
技术实现思路
1、本实用新型提供了一种基于机器视觉的全自动活体小龙虾分拣分级成套设备,解决了以上所述的技术问题。
2、本实用新型解决上述技术问题的方案如下:基于机器视觉的全自动活体小龙虾分拣分级成套设备,包括分料装置和铝型材机架,分料装置一侧设置有铝型材机架,铝型材机架的内部顶部安装有图像采集模块,铝型材机架的内部安装有分拣传送带,铝型材机架的内部顶部安装有小型分拣机器人,小型分拣机器人的底部安装有柔性手爪,分拣传送带的一侧安装有出料槽,分拣传送带的驱动端安装有伺服电机,分拣传送带的尾端设置有暂存箱。
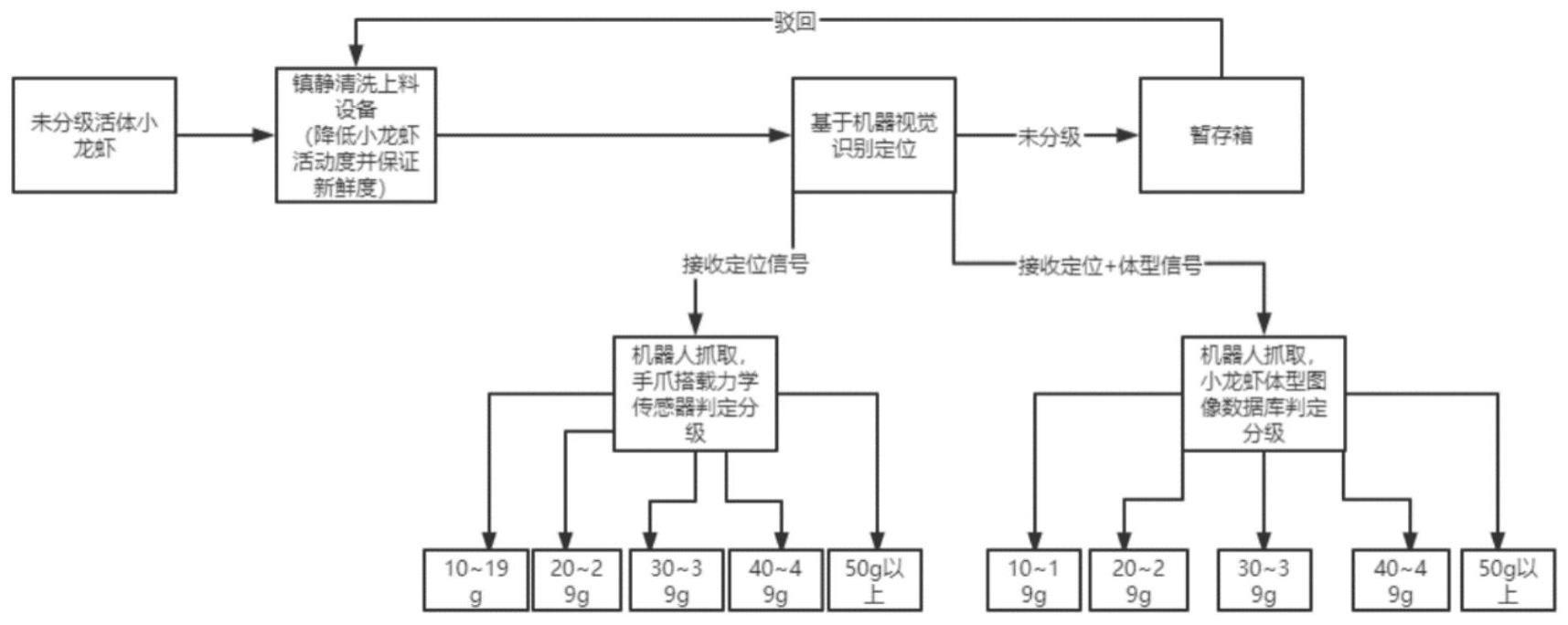
3、本实用新型的有益效果是:镇静清洗上料工序实现对小龙虾进行降温、分散和区域输送处理、分离输送,一种是基于力学传感器判定分级分拣装置及方法,接受视觉系统所给小龙虾位置信息,依据柔性手爪搭载力学传感器来判断抓取小龙虾的重量分级;另一种是基于图像数据库判定分级分拣装置及方法,接受视觉系统所给小龙虾位置信息及状态信息,利用小型分拣机器人底部的柔性手爪来抓取符合要求小龙虾,同时利用视觉系统来获取小龙虾体型大小,然后通过柔性手爪进行夹取分级处理,将不同体型的小龙虾进行分类存放,等初次分拣结束后,将暂存箱中小龙虾周期性自动驳回分料装置中,重新进入分拣环节,重量数据更明显,测量更准确,有效的提高了小龙虾的分拣效率。
4、在上述技术方案的基础上,本实用新型还可以做如下改进。
5、进一步,分料装置包括入料端机架、上行机架、出料端机架、链板驱动装置和尼龙链板,入料端机架、上行机架、出料端机架依次连接,出料端机架末端设置有链板驱动装置,链板驱动装置包括主动电机、主动轴、从动轴、尼龙链轮及尼龙链板,主动电机带动主动轴及从动轴驱动尼龙链轮带动尼龙链板平行滑动。
6、采用上述进一步方案的有益效果是:分料装置采用镇静清洗上料工序,实现对小龙虾进行降温、分散和区域输送处理、分离输送。
7、进一步,图像采集模块固定在铝型材机架上,工业相机与镜头正对分拣传送带前端。
8、优选的,图像采集模块包括稳定光照明系统、工业镜头、标准分辨率相机、图像采集卡、视觉处理器,稳定光照明系统、工业镜头、标准分辨率相机及图像采集卡采集信息为视觉处理器提供实时指令,视觉处理器通过视觉图像分析软件进行处理,视觉图像分析软件具备图像采集与显示、图像预处理、图像处理、分析处理结果和数据显示与储存功能。
9、采用上述进一步方案的有益效果是:经镇静清洗上料工序,首先对活体小龙虾降温、分散和区域输送处理、分料处理及分离输送后,进入基于机器视觉识别定位工序,接收视觉系统所给小龙虾位置信息及状态信息,传输识别进入图像数据库判定分级工序,图像采集模块反馈信号至视觉处理器,从而获取对小龙虾图像对比度、体型大小,取得高对比度的图像信号,当该像素点被确认为局部最大值时,则进行滞后阈值化处理进行边缘点确认,保留阈值区间的边缘点,之后所在阈值的边缘点进行二次判定,当边缘点连续时即保留,不连续时即抛弃,从而得到一张像素点经过处理后的图像数据,在滞后阈值化处理时,图像经过多次阈值不同的处理,从而降低该图像信息的噪声,取得最后的边缘检测结果。利用小型分拣机器人底部的柔性手爪来抓夹再分级处理,将不同体型的小龙虾进行分类存放。图像采集模块固定在铝型材机架上,工业相机与镜头正对分拣传送带前端,降低机器人及环境光对图像采集模块的影响,方便小龙虾的识别。图像数据库判定分级分拣,接受定位及体型信号,利用小型分拣机器人底部的柔性手爪来抓夹再分级处理,将不同体型的小龙虾进行分级。
10、进一步,小型分拣机器人包括基台、内平衡臂、下臂、传动轴、底层平台和柔性手爪,基台安装于铝型材机架上,基台上设置有内平衡臂、传动轴,下臂一端与内平衡臂转动连接、另一端与底层平台转动连接;传动轴一端与基台转动连接、另一端与底层平台转动连接。
11、优选的,柔性手爪为柔性机械爪,柔性手爪由三个并联的伺服轴确定抓具中心的空间位置。
12、采用上述进一步方案的有益效果是:柔性手爪为常开状态,当手爪底层平面低于相应的阈值时即让爪尖闭合,当机械爪夹取到小龙虾后,分拣机器人将小龙虾提升到高度阈值以外作水平方向上的运动。
13、优选的,图像采集模块中运用高斯模糊技术对新图像信息进行降噪处理,结合现行的图像识别技术能区分出大部分小龙虾与残肢,其中图像采集模块中加入角点检测主要是对小龙虾的头尾进行定向处理。
14、采用上述进一步方案的有益效果是:增加了图像采集与处理的精确性。
15、进一步,利用基于机器视觉的全自动活体小龙虾分拣分级成套设备的分级分拣方法,包括以下步骤:
16、s1,通过分料装置对小龙虾进行预处理,将待分拣的小龙虾进行降温、分散和区域输送处理,对小龙虾分料处理;
17、s2,当分料装置完成小龙虾的分离后,小龙虾输送到分拣传送带上,分料装置接收视觉系统读出小龙虾位置及状态信息,小龙虾作为被分拣对象在传输带上进行传输时,图像采集模块对小龙虾的拍摄位置始终处于传输带平面内,照明系统可增加小龙虾与传输带之间的图像对比度,取得高对比度的像素点信息;
18、s3,利用小型分拣机器人底部的柔性手爪来抓取符合要求小龙虾,柔性手爪为常开状态,当手爪底层平面低于相应的阈值时即让爪尖闭合,当机械爪夹取到小龙虾后,小型分拣机器人将小龙虾提升到高度阈值以外作水平方向上的运动,柔性手爪搭载力学传感器来判断抓取小龙虾的重量,柔性手爪搭载的力学传感器判定分级分拣;分拣机器人将小龙虾提升到高度阈值以外作水平方向上运动,分类并按重量分级存放,暂存箱中识别未成功的小龙虾会重新倒入、周期性自动驳回至分料装置中,重新进入分拣环节,以此循环至精准处置。
19、采用上述进一步方案的有益效果是:该装置分别采用不同的分级分拣线处置方法,方法之一即对活体小龙虾采用接受视觉系统所给小龙虾位置信息,基于力学传感器判定分级分拣装置及方法,依据手爪搭载力学传感器来判断抓取小龙虾存放,暂存箱中未识别及识别未成功的小龙虾会自动周期性驳回到分拣线开始位置,重新进入分拣环节,以此循环至精准处置。
20、进一步,利用基基于机器视觉的全自动活体小龙虾分拣分级成套设备的分级分拣方法,包括以下步骤:
21、s1,通过分料装置对小龙虾进行预处理,将待分拣的小龙虾进行降温、分散和区域输送处理,对小龙虾分料处理;
22、s2,当分料装置完成小龙虾的分离后,小龙虾输送到分拣传送带上,分料装置接收视觉系统读出小龙虾位置及状态信息,小龙虾作为被分拣对象在传输带上进行传输时,图像采集模块对小龙虾的拍摄位置始终处于传输带平面内,照明系统可增加小龙虾与传输带之间的图像对比度,取得高对比度的像素点信息;
23、s4,当该像素点被确认为局部最大值时,则进行滞后阈值化处理进行边缘点确认,保留阈值区间的边缘点,之后所在阈值的边缘点进行二次判定,当边缘点连续时即保留,不连续时即抛弃,从而得到一张像素点经过处理后的图像数据,在滞后阈值化处理时,图像经过多次阈值不同的处理,从而降低该图像信息的噪声,取得最后的边缘检测结果,利用小型分拣机器人底部的柔性手爪来抓夹再分级处理,将不同体型的小龙虾进行分级分拣。
24、采用上述进一步方案的有益效果是:该装置分别采用不同的分级分拣线处置方法,方法之二即对是接受定位及体型信号,基于图像数据库判定分级分拣装置及方法,利用小型分拣机器人底部的柔性手爪来抓夹再分级处理,将不同体型的小龙虾进行分类存放。
25、上述说明仅是本实用新型技术方案的概述,为了能够更清楚了解本实用新型的技术手段,并可依照说明书的内容予以实施,以下以本实用新型的较佳实施例并配合附图详细说明如后。本实用新型的具体实施方式由以下实施例及其附图详细给出。
- 还没有人留言评论。精彩留言会获得点赞!