自走式轻量化黑木耳菌棒摆场机及其黑木耳菌棒摆放方法
本发明属于农业机械,具体涉及一种自走式轻量化黑木耳菌棒摆场机及其黑木耳菌棒摆放方法。
背景技术:
1、我国是世界上最早栽培黑木耳的国家,人工栽培历史已有1300多年。黑木耳菌棒栽培摆场时间大多在秋收之后9-10月份,季节性强,劳动周期短,强度大,目前黑木耳菌棒的摆场方式主要依赖人工,需要人们弯腰将黑木耳菌棒一个一个摆放到地上,且需要人工将黑木耳菌棒进行摆正,进而使得摆放效率低,人工劳动强度大,同时国内外对于黑木耳菌棒的摆场机械研发处于起步阶段,没有标准化、自动化以及现成应用于菌棒摆场作业的机器,因此急需一种可以能够提高黑木耳菌棒摆放效率,降低人工劳动强度,且能够实现黑木耳菌棒摆正的装置。
技术实现思路
1、本发明的目的是为了克服现有技术不足,提出自走式轻量化黑木耳菌棒摆场机及其黑木耳菌棒摆放方法。
2、为实现上述目的,本发明采用以下技术方案:
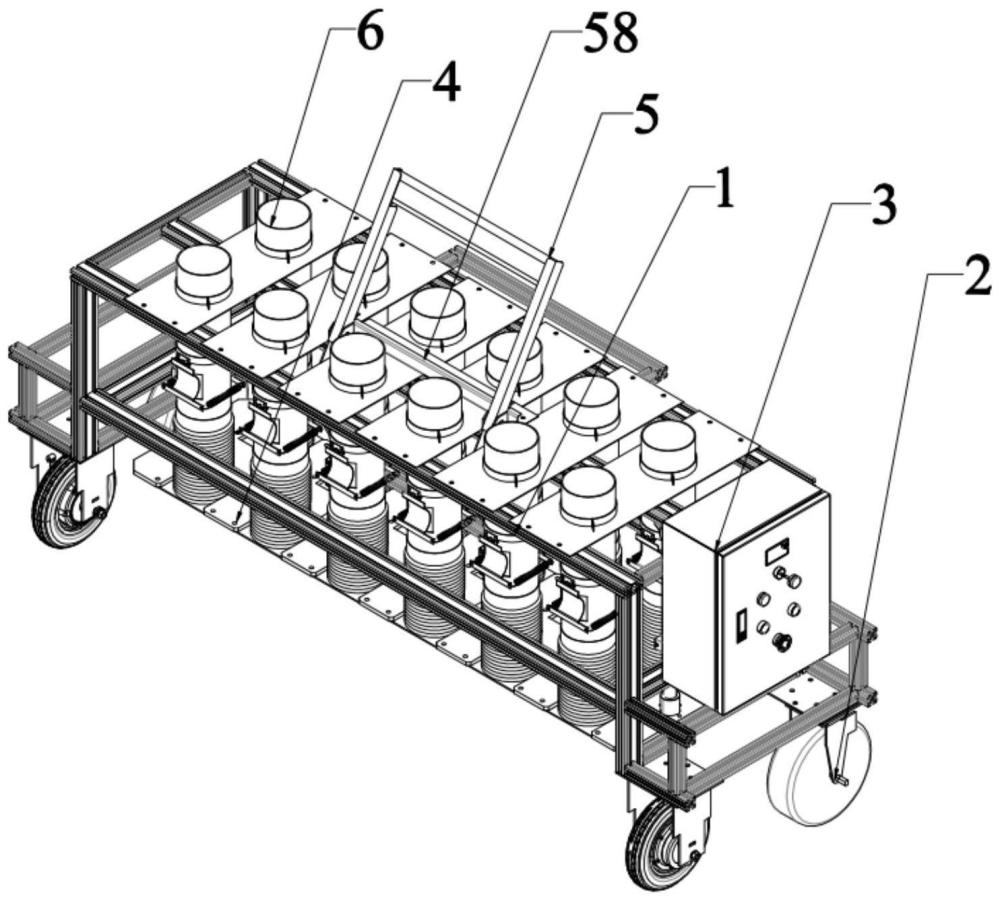
3、本发明自走式轻量化黑木耳菌棒摆场机,包括机架和车轮,其特征在于:还包括支撑板、升降机构和摆放机构。
4、所述机架的四个角均铰接有车轮,位于后方的两个车轮由自带的轮毂电机驱动;所述水平设置的支撑板与机架构成竖直方向的滑动副,并由升降机构驱动升降,且支撑板上开设有成阵列排布的多个圆孔,机架上位于各圆孔的正上方均设有摆放机构。
5、所述摆放机构包括圆管、伸缩管和缓冲组件;所述圆管与伸缩管同轴且竖直设置,圆管的上端与机架固定,下端与伸缩管的上端固定,伸缩管的下端固定于支撑板上相应圆孔的位置处,且圆管中部开设有相对设置的两个方孔;所述缓冲组件包括固定卡箍、弧形板和拉伸弹簧,固定卡箍固定于圆管上,对称且凸面朝内设置的两个弧形板上端与固定卡箍的两端分别通过一根铰接轴铰接,且铰接轴上套置有扭簧,扭簧的两端与弧形板和固定卡箍固定,两个弧形板的下端均设有一体成型的连接板,两个连接板的一端与一个拉伸弹簧的两端连接,另一端与另一个拉伸弹簧的两端连接,且每个弧形板位于一个方孔位置处。
6、优选地,所述机架两端均固定有竖直设置的光轴,支撑板两端均固定有滑块,每个滑块一个光轴构成滑动副。
7、更优选地,所述光轴上固定有限位块。
8、优选地,所述升降机构包括连接杆一、按压杆、提拉杆、连杆和锁止组件,平行且间距布置的两个按压杆上端与连接杆一的两端固定,中部均与机架构成转动副,下端与两个连杆的一端铰接,两个连杆的另一端与平行且间距布置的两个提拉杆上端铰接,两个提拉杆的下端与支撑板的两端固定,且两个提拉杆均与机架构成竖直方向的滑动副,锁止组件包括滑动轴、压缩弹簧、卡扣和锁止板,平行于按压杆且间距布置的两个滑动轴固定于连接杆二的两端,且连接杆二平行于连接杆一,并位于连接杆一的下方,每个滑动轴与位于同侧的一个按压杆构成沿轴向方向的滑动副,每个滑动轴上套置有压缩弹簧,压缩弹簧两端与滑动轴和按压杆固定,每个滑动轴上固定有卡扣,锁止板水平固定于机架上。
9、更优选地,所述机架上固定有间距布置的两个连接件,两个按压杆与两个连接件铰接。
10、更优选地,所述机架上固定有间距布置的两个导轨,两个提拉杆与两个导轨构成滑动副。
11、本发明自走式轻量化黑木耳菌棒摆场机的黑木耳菌棒摆放方法,具体如下:
12、初始状态下,支撑板位于最上端位置处,各摆放机构的伸缩管均处于压缩状态。首先控制器控制各轮毂电机驱动各车轮带动机架、支撑板、升降机构和各摆放机构移动至黑木耳菌棒摆场位置;接着升降机构驱动支撑板向下移动,支撑板带动各伸缩管拉伸,直至支撑板移动至最下端位置处;然后在每个圆管内投放一个黑木耳菌棒,黑木耳菌棒在自身重力作用下从圆管落至伸缩管内,在从伸缩管穿过圆孔,并直立落至地面;最后升降机构驱动支撑板向上移动,支撑板带动各伸缩管压缩,直至支撑板回复至初始位置,各黑木耳菌棒上端脱离相应的伸缩管,进而完成黑木耳菌棒的摆放工作。
13、其中,黑木耳菌棒通过圆管时,黑木耳菌棒的两侧与两个弧形板接触,并推动两个弧形板向外转动,进而带动两个拉伸弹簧拉伸,通过拉伸弹簧的作用力对黑木耳菌棒进行减速,进而减小黑木耳菌棒落地的速度,从而减小黑木耳菌棒落地时的冲击力,直至黑木耳菌棒与两个弧形板脱离接触,两个弧形板在拉伸弹簧和扭簧的作用下向内转动至原位;黑木耳菌棒穿过圆孔落至地面时,黑木耳菌棒的上端仍处于伸缩管内,伸缩管对黑木耳菌棒进行扶正,使得黑木耳菌棒直立摆放在地面上。
14、优选地,设计黑木耳菌棒落至地面时的速度小于预设速度值,则所述拉伸弹簧的弹性系数取值范围的计算过程如下:
15、根据能量守恒定律,黑木耳菌棒下落至地面的过程中,黑木耳菌棒的重力势能一部分转换为动能,另一部分转换为两个拉伸弹簧的弹性势能、两个扭簧的弹性势能以及黑木耳菌棒与两个弧形板接触时克服摩擦力做的功,其中黑木耳菌棒落至地面时的动能为
16、ek=1/2mv2
17、式中,m为黑木耳菌棒的重量,v为黑木耳菌棒落至地面时的速度;
18、两个拉伸弹簧的弹性势能为
19、ep1=2×1/2kx2
20、式中,k为拉伸弹簧的弹性系数,x为拉伸弹簧的伸长量;
21、两个扭簧的弹性势能为
22、ep2=2×1/2cθ2
23、式中,c为扭簧的扭转刚度,θ为扭簧的扭转角度,即为弧形板的偏转角度;
24、黑木耳菌棒与两个弧形板接触时克服摩擦力做的功为
25、w=2×μfs
26、式中,μ为黑木耳菌棒与弧形板之间的摩擦系数;f为黑木耳菌棒受到的正压力,即为拉伸弹簧对黑木耳菌棒的作用力,根据胡克定理得f=2kx;s为黑木耳菌棒与弧形板接触的长度,即为黑木耳菌棒的长度;
27、则黑木耳菌棒的重力势能为
28、mgh=1/2mv2+2×1/2kx2+2×1/2cθ2+4×μkxs
29、式中,h为黑木耳菌棒下落前距离地面的高度,g为重力加速度,且g=9.81m/s2;
30、设黑木耳菌棒落至地面时的速度小于预设速度值v1,则有
31、
32、同时黑木耳菌棒下落通过缓冲组件时,黑木耳菌棒的重力势能不能全部转换为两个拉伸弹簧的弹性势能、两个扭簧的弹性势能和黑木耳菌棒与两个弧形板接触时克服摩擦力做的功,则
33、mgh0+mgs-2×1/2kx2-2×1/2cθ2-4×μkxs>0 (2)
34、式中,h0为黑木耳菌棒下落前位置和弧形板刚与黑木耳菌棒接触位置的高度差;
35、黑木耳菌棒的长度、黑木耳菌棒的直径、黑木耳菌棒的重量m、扭簧的扭转刚度c、黑木耳菌棒与弧形板之间的摩擦系数μ、扭簧的扭转角度θ、黑木耳菌棒下落前距离地面的高度h和弧形板刚与黑木耳菌棒接触的位置高度h0均设为已知量,进而联立式(1)和式(2)求得黑木耳菌棒落至地面时的速度小于预设值v1时拉伸弹簧的弹性系数k取值范围。
36、本发明具有以下有益效果:
37、1、本发明能够实现人工站立摆放黑木耳菌棒,代替了人工弯腰摆放黑木耳菌棒的过程,且本发明能够代替人工摆正黑木耳菌棒。具体地,本发明在使用时,人工站立向圆管内投放黑木耳菌棒,通过同轴设置的圆管和伸缩管的导向作用,进而实现了对黑木耳菌棒的摆放,提高了摆放效率,降低了人工劳动强度,且黑木耳菌棒经过伸缩管落至地面后,由于伸缩管的扶正作用,使得黑木耳菌棒能够直立放置在地面,代替了人工摆正过程,进一步提高了摆放效率,降低了人工劳动强度。
38、2、本发明中设有缓冲组件,使得黑木耳菌棒经过圆管时,通过缓冲组件的缓冲作用,减小了黑木耳菌棒落至地面时的速度,进而减小黑木耳菌棒落至地面时的冲击力,防止黑木耳菌棒落地时因冲击力过大对黑木耳菌棒刺孔位置处造成影响而影响黑木耳产量的现象发生。
- 还没有人留言评论。精彩留言会获得点赞!