一种基于莲蓬自然长势的自动采收平台及采收方法
本发明涉及一种基于莲蓬自然长势的自动采收平台及采收方法,属于水生蔬菜收获装备。
背景技术:
1、莲蓬是一种具有营养价值丰富和经济价值较高的水生经济作物。为了获得高营养价值的莲子,莲蓬需要在生长最盛时被选择性收获。受莲蓬形状外观和生长环境的影响,传统的人工采摘工作强度大、效率低。随着我国成为莲子、莲藕生产和出口大国,国内已经开始研发莲蓬的半自动化、自动化、智能化的采摘技术与装备。
2、如,安徽省农业科学院农业工程研究所公开了一种莲蓬采摘装置,该装置虽能在一定程度上为工人提供了便利,但仍需手持,也未能很好解决莲蓬的采摘与转运的问题,采摘效率低。又如湘潭大学公开的一种莲蓬自动采摘装置,该装置行通过莲田间的轨道、图像采集系统、俯仰臂对莲蓬设施选择性采摘,但其采摘、输送过程较为复杂,特别是莲间轨道的铺设尤为困难,铺设难度大,安装成本高。
3、可见,有必要设计一种实施难度低、成本低且采摘效率高的莲蓬自动采收装置。
技术实现思路
1、本发明在于提供一种基于莲蓬自然长势的自动采收平台及采收方法,通过利用无人机载运相互结合的俯仰臂和双目视觉,对莲蓬进行识别定位,再结合自动采收装置以及收纳装置对定位到的莲蓬进行采收,与现有技术相比,采收效率高且实施难度低、成本低。
2、为达到上述目的,本发明是采用下述技术方案实现的。
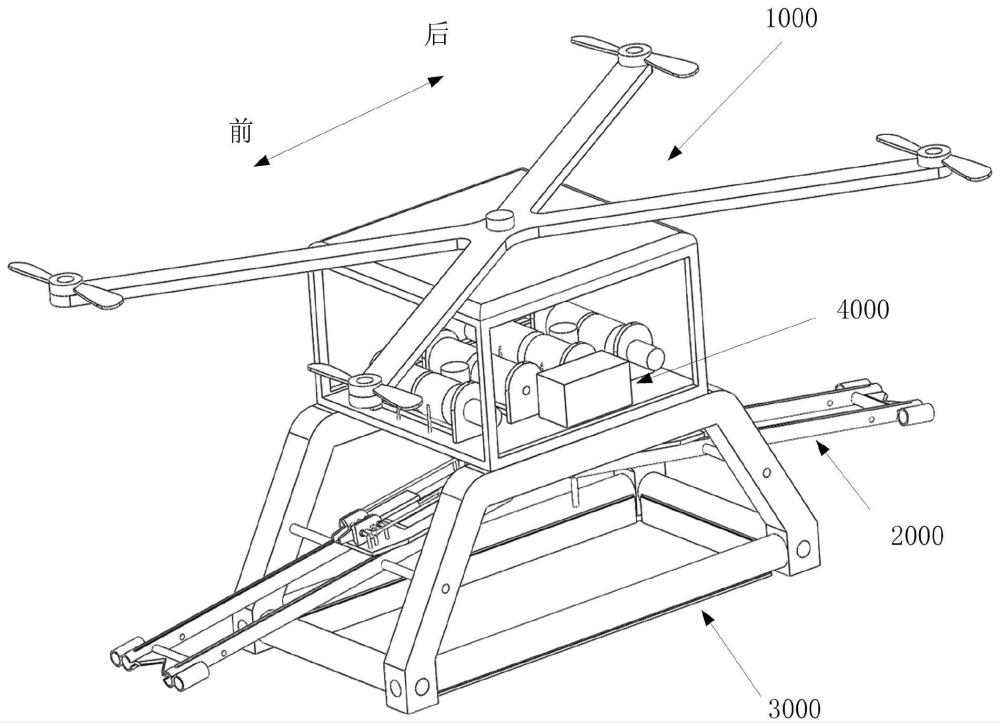
3、第一方面,本发明提供一种基于莲蓬自然长势的自动采收平台,包括:载运调姿机构,采摘收集机构,自适应式暂存袋以及系统控制器;
4、所述载运调姿机构包括无人机以及多方位莲蓬识别定位机构,所述莲蓬多方位识别定位机构包括双目视觉以及用于带动所述定位识别器多角度转动的俯仰臂,所述俯仰臂设置在无人机底端,所述双目视觉安装于所述俯仰臂末端;
5、所述采摘收集机构包括柔性夹爪,牵引组件以及切割刀,所述柔性夹爪滑动设置于所述俯仰臂上,用于柔性夹持待采摘莲蓬的果柄,所述牵引组件设置于所述无人机上,用于对所述柔性夹爪进行牵引,使其在所述俯仰臂上滑动,所述切割刀设置于俯仰臂上,并且位于所述柔性夹爪在俯仰臂上滑动的路径上;
6、所述自适应式暂存袋吊装在所述无人机底端,其包括设置于无人机底端的帘筒框架以及底板,所述帘筒框架包括多条帘筒,所述帘筒具有帘布卷收状态以及帘布放出状态,所述底板连接每条帘筒中帘布的放出端;
7、所述系统控制器设置于所述无人机内部,其被配置用于控制所述载运调姿机构以及所述采摘收集机构协同配合对莲蓬进行识别定位,采摘以及收集至自适应式暂存袋中,完成莲蓬的自动采摘与收集。
8、可选地,所述无人机包括安装台架以及分别安装于所述安装台架两侧底端的左支撑臂和右支撑臂,所述左支撑臂和右支撑臂均呈梯形;
9、所述俯仰臂包括驱动电机、丝杆、臂架、转轴,所述臂架包括互相平行的两条长管,两条所述长管通过互相平行的两条短管相连,两条所述长管首端内侧分别开设有矩形槽二;
10、所述驱动电机安装在安装台架内,其输出轴穿过所述安装台架与丝杆同轴转动连接,所述丝杆连接转轴中部,两条所述矩形槽二内部分别滑动设置有滑块,所述转轴两端分别转动设置在所述滑块内孔中,所述臂架通过设置在其中部两侧的伸出轴分别与左支撑臂和右支撑臂转动连接,所述切割刀两端分别连接两条长管末端内侧。
11、可选地,所述柔性夹爪包括u型滑台、左指、右指、前导向杆架、后导向杆架;
12、两条所述长管上表面分别开设有矩形槽一,两条所述矩形槽一内分别安装有导轨,所述u型滑台滑动设置在所述导轨中;
13、所述前导向杆架和后导向杆架垂直于所述u型滑台滑动方向设置于所述u型滑台上,所述左指和右指分别滑动套设在所述前导向杆架和后导向杆架外圈,所述前导向杆架和后导向杆架外圈分别伸缩套设有复位弹簧并固定套设有前限位螺母和后限位螺母,所述复位弹簧两端分别连接所述左指和右指内侧,所述前限位螺母和后限位螺母分别位于所述左指和右指外侧。
14、可选地,所述牵引组件包括第一放索模组以及左前改向滑轮一和右前改向滑轮一,所述第一放索模组包括第一柔索卷以及第二柔索卷;
15、所述左前改向滑轮一和右前改向滑轮一分别设置在两条导轨末端的对应位置上;
16、所述第一柔索卷放出的柔索分别经过所述安装台架底部,长管左后封盖以及左前改向滑轮一与靠近左指的一侧导轨连接;
17、所述第二柔索卷放出的柔索分别经过所述安装台架底部,长管右后封盖以及右前改向滑轮一与靠近右指的一侧导轨连接。
18、可选地,所述牵引组件还包括第二放索模组、右前改向滑轮二、右后改向滑轮、左前改向滑轮二、左后改向滑轮,所述第二放索模组包括第三柔索卷以及第四柔索卷;
19、所述右前改向滑轮二和左前改向滑轮二分别设置在所述u型滑台上并位于所述右指和左指的外侧;
20、所述右后改向滑轮和左后改向滑轮分别设置在两条所述长管首端上表面;
21、所述左指和右指内侧均设有带中心孔的前凸台和后凸台;
22、所述第三柔索卷放出的柔索分别经过所述安装台架底部,左后改向滑轮,左前改向滑轮二以及所述左指后凸台中心孔与所述右指后凸台连接;
23、所述第四柔索卷放出的柔索分别经过所述安装台架底部,右后改向滑轮,右前改向滑轮二以及所述右指前凸台中心孔与所述左指前凸台连接。
24、可选地,所述帘筒框架包括互相连接的一对纵向帘筒和一对横向帘筒,所述一对纵向帘筒和一对横向帘筒分别设置在所述左支撑臂和右支撑臂的底端之间;
25、所述底板分别连接一对纵向帘筒和一对横向帘筒中帘布的放出端。
26、可选地,所述双目视觉包括两台智能相机,两条所述长管末端外侧分别连接有相机固定壳体,所述两台智能相机分别设置在所述相机固定壳体中;
27、所述莲蓬多方位识别定位机构包括两套俯仰臂以及两套双目视觉,两套所述俯仰臂的延伸方向相反,其他设置相同,两套所述双目视觉分别设置在两套所述俯仰臂的末端;
28、所述自动采收平台包括两组采摘收集机构,两组所述采摘收集机构设置相同,其分别设置在两套所述俯仰臂上;
29、所述切割刀为v型切割刀。
30、第二方面,本发明提供一种基于莲蓬自然长势的自动采收方法,应用如第一方面所述的基于莲蓬自然长势的自动采收平台,包括:
31、采收作业前,系统控制器控制驱动电机,使两套俯仰臂位于水平状态,同时,系统控制器控制第一放索模组和第二放索模组,使柔性夹爪位于俯仰臂的底端,并使左指和右指在复位弹簧作用下处于张开状态;
32、采收作业时,系统控制器控制载运调姿机构和两组采摘收集机构,自动采摘莲蓬并将其送至自适应式暂存袋。
33、可选地,所述采收作业时,系统控制器控制载运调姿机构和两组采摘收集机构,自动采摘莲蓬并将其送至自适应式暂存袋,包括:
34、步骤a,系统控制器控制无人机,载运自动采收平台飞行在荷塘的上方;
35、步骤b,系统控制器控制两套俯仰臂的驱动电机,通过臂架带动两套双目视觉寻找荷叶间的莲蓬,并接收其中任意一套双目视觉发现的待采摘莲蓬图像信息;
36、步骤c,系统控制器控制与该套发现待采摘莲蓬的双目视觉配套的采摘收集机构进行莲蓬的采摘和收集,同时控制另一套俯仰臂带动另一套双目视觉继续寻找荷叶间的莲蓬;
37、步骤d,当完成莲蓬采摘后,如果采摘好的莲蓬的总重未达到预设的自动采收平台承重阈值,则返回步骤b,否则系统控制器控制载运调姿机构将采摘好的莲蓬运往卸货点。
38、与现有技术相比,本发明所达到的有益效果:本发明根据莲蓬复杂的自然长势,利用无人机、俯仰臂和双目视觉构建载运调姿机构,有效解决了千姿百态下莲蓬果柄识别和定位的问题,通过采摘和收集两动作的协同设计,利用柔索和复位弹簧设计柔性夹爪,由柔性夹爪夹持莲蓬果柄,在柔索牵引过程中由v型切割刀切断夹爪夹持的莲蓬果柄,并采摘好的莲蓬送往自适应式暂存袋,能够一次作业过程中采摘尽可能多的莲蓬,避免频繁地往返于采摘点至卸货点之间,有助提高莲蓬的采摘效率,通过将载运调姿机构、采摘收集机构以及自适应式暂存袋结合使用,以成本低且简单的实施手段实现了莲蓬的高效自动采摘和收集。
- 还没有人留言评论。精彩留言会获得点赞!