除草机器人的控制方法、装置、介质及除草机器人与流程
本技术涉及计算机,具体而言,涉及一种除草机器人的控制方法、装置、介质及除草机器人。
背景技术:
1、在传统农业中,除草是保证作物健康生长的重要环节。主流的除草方法包括机械除草和化学除草。机械除草是最古老的方法之一,通过物理方式移除杂草。它的优点在于立即效果和无化学残留。
2、随着科技的发展,除草机器人应用于人们的生活中,并采用激光对杂草进行除草,其中,除草机器人在获取杂草位置时被触发,并移动至杂草位置,除草机器人采用激光对杂草进行清除,并在单一策略下对各种杂草进行处理,并没有对杂草或生态农田动态把控。
技术实现思路
1、本技术的实施例提供了一种除草机器人的控制方法、装置、介质及除草机器人,进而至少在一定程度上除草机器人基于生态农田的杂草位置进行路径导向,并采集杂草图像,以便于杂草图像在图像识别下定义杂草种类,进而根据杂草种类触发对应的激光除草策略,提高了除草机器人对杂草的针对性激光处理,并优化除草效率,同时,基于生态农田的环境变化而优化除草机器人的整体性除草策略,以便于除草机器人针对生态农田进行动态把控,从而提高除草效率和适应性。
2、本技术的其他特性和优点将通过下面的详细描述变得显然,或部分地通过本技术的实践而习得。
3、根据本技术实施例的一个方面,提供了一种除草机器人的控制方法,包括:
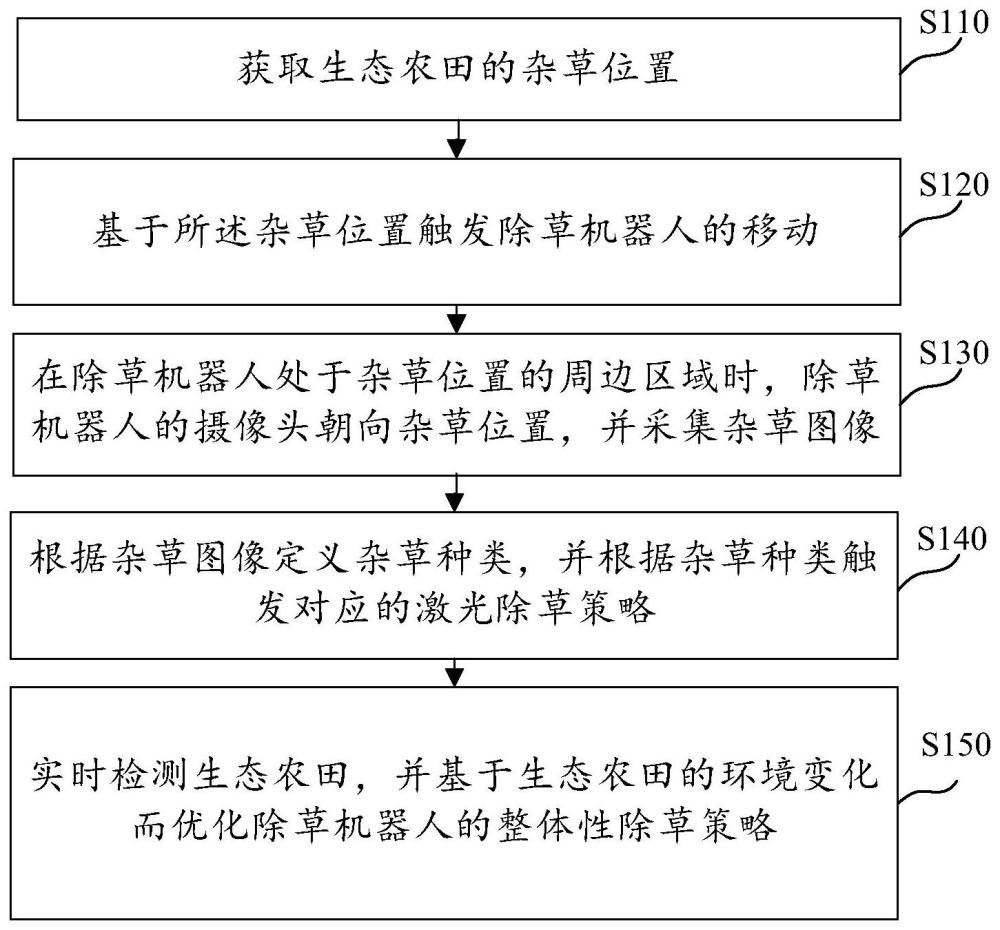
4、获取生态农田的杂草位置;
5、基于所述杂草位置触发除草机器人的移动;
6、在除草机器人处于杂草位置的周边区域时,除草机器人的摄像头朝向杂草位置,并采集杂草图像;
7、根据杂草图像定义杂草种类,并根据杂草种类触发对应的激光除草策略;
8、实时检测生态农田,并基于生态农田的环境变化而优化除草机器人的整体性除草策略。
9、可选的,所述获取生态农田的杂草位置,包括:
10、实时检测生态农田,并采集生态农田中各个位置的土壤参数;
11、根据各个位置的土壤参数确定生态农田的生态环境状况;
12、根据多维度光学对生态农田进行扫描,并在不同波长下采集多个光谱特征;
13、遍历多个光谱特征,以定义作物的光谱特征和杂草的光谱特征;
14、根据杂草的光谱特征标记杂草,并在生态农田中标记杂草位置。
15、可选的,所述获取生态农田的杂草位置,还包括:
16、遍历生态农田,并计算生态农田的生态特征分析的综合得分,此时,生态特征分析的综合得分的计算公式如下;
17、efa=σ(p_i×w_i)
18、其中,efa为生态特征分析的综合得分,是一个量化指标,用于综合评估生态农田的生态环境状况,p_i代表第i个生态参数,w_i是第i个参数的权重。
19、可选的,所述遍历多个光谱特征,以定义作物的光谱特征和杂草的光谱特征,包括:
20、利用红外线、紫外线和可见光等多种波长进行农田扫描,通过分析植物在不同波长下的光谱特性,准确区分作物和杂草,并为激光定位提供精确数据;公式表示为:
21、mos=∫(λ×r(λ)×s(λ))dλ
22、其中,mos指通过积分不同波长下的光信号来得到的综合值,它代表了在多个波长(λ)上植物反射率(r(λ))和光波的灵敏度系数(s(λ))的整体评估;λ表示光的波长;r(λ)是在波长λ下植物反射的比率;s(λ)是对应波长的灵敏度系数。
23、可选的,所述获取生态农田的杂草位置,还包括:
24、利用杂草在不同波长下的吸收和反射特性,精确识别杂草位置,为激光除草提供导向;公式表示为:
25、srl=∫(λ×t(λ)×l(λ))dλ
26、其中,srl为光谱共振定位,用于确定杂草在光谱中的特定位置,t(λ)是在波长λ下的杂草透射率;l(λ)是光谱共振定位函数,用于识别和强调杂草在特定波长下的特征。
27、可选的,所述根据杂草图像定义杂草种类,并根据杂草种类触发对应的激光除草策略,包括:
28、根据杂草图像定义杂草种类;
29、根据杂草种类匹配对应的物理和生物特性;
30、基于对应的物理和生物特性调控除草机器人的激光的波长和强度,并触发对应的激光除草策略。
31、可选的,所述根据杂草图像定义杂草种类,并根据杂草种类触发对应的激光除草策略,还包括:
32、eblt=σ(λ_n×e_n×f(t_n,c_n))
33、其中,eblt为生态平衡激光处理,e_n是对应波长λ_n的能量输出,控制激光的强度;f(t_n,c_n)是一个函数,考虑了杂草种类t_n和当前的生态条件c_n。
34、根据本技术实施例的一个方面,提供了一种除草机器人的控制装置,包括:
35、获取模块,用于获取生态农田的杂草位置;
36、触发模块,用于基于所述杂草位置触发除草机器人的移动;
37、采集模块,用于在除草机器人处于杂草位置的周边区域时,除草机器人的摄像头朝向杂草位置,并采集杂草图像;
38、策略模块,用于根据杂草图像定义杂草种类,并根据杂草种类触发对应的激光除草策略;
39、优化模块,用于实时检测生态农田,并基于生态农田的环境变化而优化除草机器人的整体性除草策略。
40、根据本技术实施例的一个方面,提供了一种计算机可读介质,其上存储有计算机程序,所述计算机程序被处理器执行时实现如上述实施例中所述的除草机器人的控制方法。
41、根据本技术实施例的一个方面,提供了一种除草机器人,包括:一个或多个处理器;存储装置,用于存储一个或多个程序,当所述一个或多个程序被所述一个或多个处理器执行时,使得所述一个或多个处理器实现如上述实施例中所述的除草机器人的控制方法。
42、根据本技术实施例的一个方面,提供了一种计算机程序产品或计算机程序,该计算机程序产品或计算机程序包括计算机指令,该计算机指令存储在计算机可读存储介质中。计算机设备的处理器从计算机可读存储介质读取该计算机指令,处理器执行该计算机指令,使得该计算机设备执行上述实施例中提供的除草机器人的控制方法。
43、在本技术的一些实施例所提供的技术方案中,获取生态农田的杂草位置;基于所述杂草位置触发除草机器人的移动;在除草机器人处于杂草位置的周边区域时,除草机器人的摄像头朝向杂草位置,并采集杂草图像;根据杂草图像定义杂草种类,并根据杂草种类触发对应的激光除草策略;实时检测生态农田,并基于生态农田的环境变化而优化除草机器人的整体性除草策略,此时,除草机器人基于生态农田的杂草位置进行路径导向,并采集杂草图像,以便于杂草图像在图像识别下定义杂草种类,进而根据杂草种类触发对应的激光除草策略,提高了除草机器人对杂草的针对性激光处理,并优化除草效率,同时,基于生态农田的环境变化而优化除草机器人的整体性除草策略,以便于除草机器人针对生态农田进行动态把控,从而提高除草效率和适应性。
44、应当理解的是,以上的一般描述和后文的细节描述仅是示例性和解释性的,并不能限制本技术。
- 还没有人留言评论。精彩留言会获得点赞!