仿形调节系统、牧草收获机及仿形调节方法
本技术涉及牧草收获机,特别是涉及一种仿形调节系统、牧草收获机及仿形调节方法。
背景技术:
1、草原资源是我国重要的战略资源,畜牧业的发展离不开饲草饲料的生产和供给水平的提高。大力开发和利用饲草资源,是我国新形势下实现粮经饲统筹发展的重要战略举措。我国目前是市场上的牧草收获机对复杂地形地貌适应性差,作业质量差、可靠性低。
技术实现思路
1、基于此,有必要针对如何实现提升牧草收获机对复杂地形地貌适应性问题,提供一种仿形调节系统、牧草收获机及仿形调节方法。
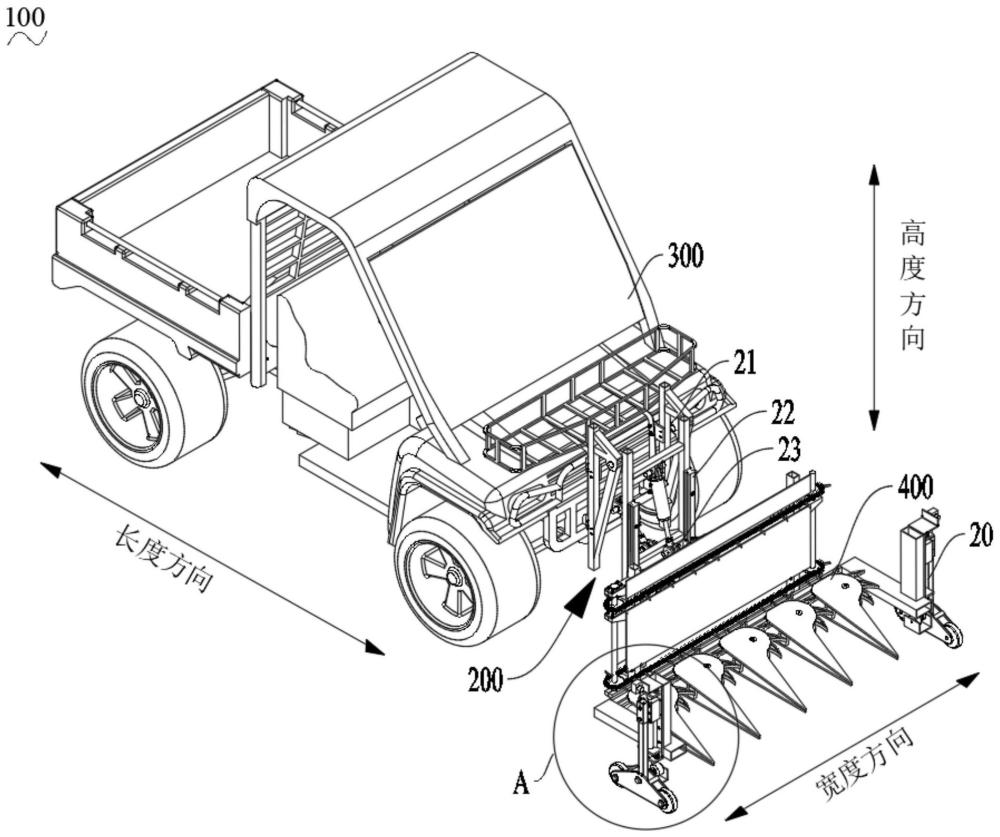
2、一种仿形调节系统,用于牧草收获机,所述牧草收获机包括相互连接的机身及割台,所述仿形调节系统包括仿形模块、检测模块及俯仰调节模块,所述仿形模块分别配接于所述割台沿所述牧草收获机宽度方向相对的第一端及第二端,所述检测模块配接于所述仿形模块上,所述俯仰调节模块配接于所述机身与所述割台之间;
3、所述仿形模块包括仿形杆、转轴、连接件及至少两个仿形轮,所述仿形杆的一端与所述割台活动连接,所述仿形杆背离所述割台的另一端与所述连接件通过转轴转动连接,全部所述仿形轮均转动地配接于所述连接件背离所述仿形杆的一侧,全部所述仿形轮均沿所述牧草收获机的长度方向并排设置,并均用于沿地面滚动;
4、所述检测模块包括角度传感器,所述角度传感器用于实时检测所述连接件带动所述转轴相对所述仿形杆转动的旋转角度;
5、所述俯仰调节模块用于根据所述旋转角度控制所述割台沿所述牧草收获机长度方向的前端相对后端俯仰倾斜,至所述割台所在的平面相对地面水平。
6、在其中一个实施例中,所述仿形杆与所述割台滑动连接,且所述仿形杆能够受控相对所述割台沿重力方向移动。
7、在其中一个实施例中,所述检测模块还包括高度检测器,所述高度检测器用于检测位于所述第一端的所述连接件相对所述割台沿重力方向移动的第一高度,及检测位于所述第二端的所述连接件相对所述割台沿重力方向移动的第二高度。
8、在其中一个实施例中,还包括高度调节模块,所述高度调节模块配接于所述机身与所述割台之间,并用于根据所述第一高度及所述第二高度控制所述割台沿重力方向升降,以调节所述割台相对地面的离地高度。
9、在其中一个实施例中,还包括角度调节模块,所述角度调节模块配接于所述机身与所述割台之间,并用于根据所述第一高度及所述第二高度控制所述第一端相对所述第二端倾斜,以使得所述第一端与所述第二端之间的连线相对地面水平。
10、一种牧草收获机,包括机身、割台及如前述实施例中的仿形调节系统。
11、一种仿形调节方法,用于如前述实施例中的仿形调节系统及前述实施例中的牧草收获机,其特征在于,包括:
12、获取所述割台的所述第一端相对地面的第一离地高度、所述第二端相对地面的第二离地高度、位于所述第一端的所述连接件带动所述转轴相对所述仿形杆转动的第一旋转角度、及位于所述第二端的所述连接件带动所述转轴相对所述仿形杆转动的第二旋转角度;
13、比对所述第一离地高度与所述第二离地高度的大小、及所述第一旋转角度与所述第二旋转角度的大小;
14、根据比对结果控制所述割台移动。
15、在其中一个实施例中,所述的根据比对结果控制所述割台移动具体包括:
16、确定所述第一离地高度与所述第二离地高度的差值不大于预设差值,且确定所述第一旋转角度及所述第二旋转角度均小于第一预设旋转角度;
17、控制所述割台沿所述牧草收获机长度方向的前端相对后端下俯,至所述割台所在的平面相对地面水平。
18、在其中一个实施例中,所述的根据比对结果控制所述割台移动具体包括:
19、确定所述第一离地高度与所述第二离地高度的差值不大于预设差值;
20、确定所述第一旋转角度及所述第二旋转角度均大于第二预设旋转角度;
21、控制所述割台沿所述牧草收获机长度方向的前端相对后端上仰,至所述割台所在的平面相对地面水平。
22、在其中一个实施例中,所述的根据比对结果控制所述割台移动具体包括:
23、确定所述第一旋转角度及所述第二旋转角度均小于第二预设旋转角度,且均大于第一预设旋转角度;
24、确定所述第一离地高度大于所述第二离地高度,且所述第一离地高度与所述第二离地高度之间的差值大于预设差值;
25、控制所述割台的所述第一端相对所述第二端向下倾斜,以使得所述第一端与所述第二端之间的连线相对地面水平。
26、在其中一个实施例中,所述的根据比对结果控制所述割台移动具体包括:
27、确定所述第一旋转角度及所述第二旋转角度均小于第二预设旋转角度,且均大于第一预设旋转角度;
28、确定所述第一离地高度小于所述第二离地高度,且所述第一离地高度与所述第二离地高度之间的差值大于预设差值;
29、控制所述割台的第一端相对所述第二端向上倾斜,以使得所述第一端与所述第二端之间的连线相对地面水平。
30、在其中一个实施例中,所述的根据比对结果控制所述割台移动具体包括:
31、确定所述第一旋转角度及所述第二旋转角度均小于第二预设旋转角度,且均大于第一预设旋转角度;
32、确定所述第一离地高度及所述第二离地高度均大于预设离地高度;
33、控制所述割台沿重力方向下降,至所述第一离地高度及所述第二离地高度等于所述预设离地高度。
34、在其中一个实施例中,所述的根据比对结果控制所述割台移动具体包括:
35、确定所述第一旋转角度及所述第二旋转角度均小于第二预设旋转角度,且均大于第一预设旋转角度;
36、确定所述第一离地高度及所述第二离地高度均小于预设离地高度;
37、控制所述割台沿重力方向上升,至所述第一离地高度及所述第二离地高度等于所述预设离地高度。
38、在其中一个实施例中,所述的根据比对结果控制所述割台移动具体包括:
39、确定所述第一旋转角度及所述第二旋转角度均小于第二预设旋转角度,且均大于第一预设旋转角度;
40、确定所述第一离地高度及所述第二离地高度均小于预设离地高度;
41、确定所述第一离地高度小于所述第二离地高度,且所述第一离地高度与所述第二离地高度之间的差值大于预设差值;
42、控制所述割台的所述第二端相对所述第一端向下倾斜,以使得所述第一端与所述第二端之间的连线相对地面水平;
43、控制所述割台沿重力方向上升,至所述第一离地高度及所述第二离地高度等于所述预设离地高度。
44、在其中一个实施例中,所述的根据比对结果控制所述割台移动具体包括:
45、确定所述第一旋转角度及所述第二旋转角度均小于第二预设旋转角度,且均大于第一预设旋转角度;
46、确定所述第一离地高度及所述第二离地高度均小于预设离地高度;
47、确定所述第一离地高度大于所述第二离地高度,且所述第一离地高度与所述第二离地高度之间的差值大于预设差值;
48、控制所述割台的所述第一端相对所述第二端向下倾斜,以使得所述第一端与所述第二端之间的连线相对地面水平;
49、控制所述割台沿重力方向上升,至所述第一离地高度及所述第二离地高度等于所述预设离地高度。
50、在其中一个实施例中,所述的根据比对结果控制所述割台移动具体包括:
51、确定所述第一旋转角度及所述第二旋转角度均小于第二预设旋转角度,且均大于第一预设旋转角度;
52、确定所述第一离地高度及所述第二离地高度均大于预设离地高度;
53、确定所述第一离地高度大于所述第二离地高度,且所述第一离地高度与所述第二离地高度之间的差值大于预设差值;
54、控制所述割台的所述第一端相对所述第二端向下倾斜,以使得所述第一端与所述第二端之间的连线相对地面水平;
55、控制所述割台沿重力方向下降,至所述第一离地高度及所述第二离地高度等于所述预设离地高度。
56、在其中一个实施例中,所述的根据比对结果控制所述割台移动具体包括:
57、确定所述第一旋转角度及所述第二旋转角度均小于第二预设旋转角度,且均大于第一预设旋转角度;
58、确定所述第一离地高度及所述第二离地高度均大于预设离地高度;
59、确定所述第一离地高度小于所述第二离地高度,且所述第一离地高度与所述第二离地高度之间的差值大于预设差值;
60、控制所述割台的所述第一端相对所述第二端向下倾斜,以使得所述第一端与所述第二端之间的连线相对地面水平;
61、控制所述割台沿重力方向下降,至所述第一离地高度及所述第二离地高度等于所述预设离地高度。
62、上述仿形调节系统、牧草收获机及仿形调节方法,仿形调节系统用于牧草收获机,牧草收获机包括相互连接的机身及割台,仿形调节系统包括仿形模块、检测模块及俯仰调节模块,仿形模块分别配接于割台沿牧草收获机宽度方向相对的第一端及第二端,检测模块配接于仿形模块上,俯仰调节模块配接于机身与割台之间;仿形模块包括仿形杆、转轴、连接件及至少两个仿形轮,仿形杆的一端与割台活动连接,仿形杆背离割台的另一端与连接件通过转轴转动连接,全部仿形轮均转动地配接于连接件背离仿形杆的一侧,全部仿形轮均沿牧草收获机的长度方向并排设置,并均用于沿地面滚动;检测模块包括角度传感器,角度传感器用于实时检测连接件带动转轴相对仿形杆转动的旋转角度;俯仰调节模块用于根据旋转角度控制割台沿牧草收获机长度方向的前端相对后端俯仰倾斜,至割台所在的平面相对地面水平。本技术实施例提供的仿形调节系统中,能够利用角度传感器实时检测连接带动转轴相对仿形杆转动的角度,以确定牧草收获机在行进过程中地面坡度的变化,同时,还能够通过俯仰调节模块控制割台沿牧草收获机长度方向的前端相对后端俯仰倾斜,至割台所在的平面相对地面水平,以实现地面植被的均匀留茬。
- 还没有人留言评论。精彩留言会获得点赞!