基于视觉识别的蒜薹采收机及采收方法
本发明属于智能农业机械领域,涉及一种基于视觉识别的蒜薹采收机及采收方法,实现视觉识别情况下蒜薹的连续采收作业。
背景技术:
1、我国大蒜种植面积居世界首位。蒜薹是大蒜的花茎,营养保健价值较高。蒜薹采摘是大蒜收获的必要过程之一。蒜薹采收具有很强的时效性,如不及时抽薹,对蒜薹的质量及大蒜的产量都会产生严重影响。由于蒜薹的采收要求很高,要确保蒜薹采收质量和避免蒜株损伤,因此,目前蒜薹采收工作高度依赖人工,劳动强度大,作业效率低。蒜薹机械化收获水平较低,市场上还未出现蒜薹采收机的推广应用,成为制约大蒜和蒜薹产业发展的卡脖子环节,迫切需要研发蒜薹高效采摘机械代替人工抽薹。
2、经文献检索发现,中国实用新型专利“一种蒜薹收获机”,公告号cn216254019u,提出了一种蒜薹收获机,包括移动机架、拨料组件及扶料单元;该蒜薹收获机通过滑动耙条组夹紧固定蒜薹后旋转完成抽薹动作,其滑动耙条组布置相对密集且长度较长,蒜薹植株在抽薹后还需继续生长,因此在采收过程中应当尽量避免蒜薹植株和叶片的损伤;该方法的滑动耙条组不能进行智能化区分叶片和蒜薹,因此难以保证夹持过程中不对叶片造成损伤,且耙条对蒜薹夹持时,也极其容易对蒜薹表面造成损伤。
3、针对目前蒜薹采收过程中劳动强度大、智能化水平低和蒜薹易损伤等瓶颈问题,急需发明一种基于视觉识别的蒜薹采收机及采收方法,实现蒜薹的机械化智能化采收,简化作业步骤,降低采收损伤,提高采收效率。
技术实现思路
1、本发明提出了一种基于视觉识别的蒜薹采收机及采收方法,实现了对蒜薹采收和输送的一体化作业,具有结构简单,采收效率高且不损伤蒜薹植株和蒜薹的特点。
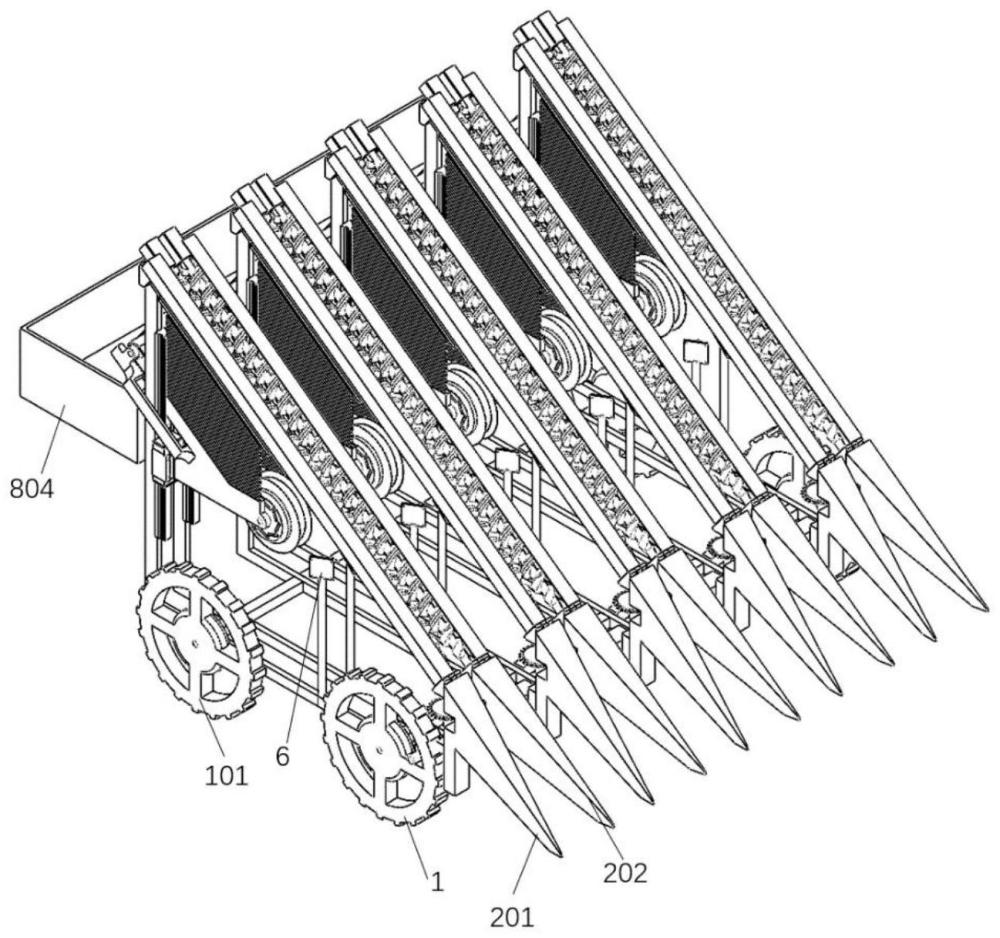
2、基于视觉识别的蒜薹采收机,包括机架、自走装置、分禾装置、夹根装置、定向输送装置、排叶装置、感知装置、采收装置和收集装置。所述的自走装置安装在机架的两侧,用于整机的行走;所述的分禾装置安装在机架的前方,用于分行、扶正、聚拢蒜薹植株;所述的夹根装置安装在机架上,分禾装置的后方,用于在不损伤假茎的状态下夹断蒜薹根部;所述的定向输送装置斜向安装在机架上,夹根装置的后方,用于保持蒜薹竖直状态并向后输送;所述的排叶装置安装在机架的一侧,定向输送装置的下方,用于将蒜薹植株的叶片向下排出防止采摘时叶片卷入采收装置;所述的感知装置安装在机架的一侧,排叶装置的对侧,用于检测蒜薹植株第一叶的位置;所述的采收装置安装在机架上,定向输送装置的下方,排叶装置的后方,用于将蒜薹从假茎中拔出;所述的收集装置安装在采收装置的后方,用于将采下的蒜薹运输至收集位置。
3、所述的分禾装置,包括左分禾器和右分禾器,所述的左分禾器安装在机架前端的左侧,所述的右分禾器安装在机架前端的右侧,两分禾器中间会形成v形的槽口,用于将槽口宽度范围内的蒜薹引导至夹根装置入口处;
4、所述的夹根装置,包括自复位滑块、夹根装置驱动电机和夹根盘,所述的自复位滑块固定在机架上分禾装置的后方,自复位滑块可左在右小幅度的位移后自动回到原位,用于完成夹根装置的复位动作;所述的夹根装置驱动电机固定在自复位滑块的输出法兰上,用于驱动夹根盘旋转;所述的夹根盘固定在夹根装置驱动电机出轴上分禾装置的开槽内,可根据蒜薹植株生长情况手动上下调整,用于夹断蒜薹根部;
5、所述的定向输送装置,包括定向输送装置驱动电机、螺旋毛刷辊和护板,所述的定向输送装置驱动电机斜向固定在机架后端的上方,与水平面呈夹角α,用于驱动螺旋毛刷辊的旋转;所述的螺旋毛刷辊一端固定在定向输送装置驱动电机出轴上另一端安装在机架前端的下方,用于保持蒜薹竖直状态向后输送;所述的护板固定在机架上螺旋毛刷辊的外侧,用于防止蒜薹卷入螺旋毛刷辊;
6、所述的螺旋毛刷辊,其特征在于:所述的螺旋毛刷辊的螺旋升角和螺旋毛刷辊与水平面的夹角同为α,此角度布置可以保证螺旋毛刷辊的毛刷间缝隙可以与地面保持垂直,以便于蒜薹保持竖直状态运输;
7、所述的排叶装置,包括排叶装置支架和排叶风机,所述的排叶装置支架安装在右侧的机架上夹根装置的后方,用于定位排叶风机安装位置;所述的排叶风机安装在排叶装置支架的顶端,用于将蒜薹植株的叶片吹向一侧,防止蒜薹叶片卷入采收装置;
8、所述的感知装置,包括感知装置支架和感知相机,所述的感知装置支架安装在左侧的机架上夹根装置的后方,用于定位感知相机的安装位置;所述的感知相机安装在感知装置支架的顶端,用于感知定位蒜薹植株第一叶的位置;
9、所述的采收装置,包括直线模组、直线模组滑块、采收轮支架、采收装置驱动电机、采收轮、柔性贴面,所述的直线模组竖直固定在机架后方,用于改变采收装置的工作位置;所述的直线模组滑块安装在直线模组上,可沿直线模组做直线运动,用于安装采收装置其他组件;所述的采收轮支架固定在直线模组滑块上,用于安装采收轮和收集装置;所述的采收装置驱动电机安装在采收轮支架上,用于驱动采收轮旋转;所述的采收轮固定在采收装置驱动电机的输出法兰上,用于蒜薹采收动作的实现;所述的柔性贴面贴附在采收轮表面,用于接触蒜薹表面而不损伤蒜薹;
10、所述的采收轮中间开有两段v形缝隙的槽轮,内段斜面与采收轮底面的斜率β<15°,此段斜面用于夹紧蒜薹;外段斜面与采收轮底面斜率γ<90°且γ>β,此段斜面用于导向蒜薹进入内段斜面处;
11、所述的收集装置,包括收集装置风琴布、卸薹板、输送带和收集箱,所述的风琴布一端固定在采收轮支架的上方,另一端固定在机架上边缘,风琴布可以随着采收装置的上下移动而拉伸收缩,用于防止采收后的蒜薹掉落出收集位置;所述的卸薹板安装在采收轮支架的下方,卸薹板尖端在采收轮的v形缝隙内,用于将采收轮夹紧的蒜薹从采收轮排出;所述的输送带一端安装在采收轮支架上采收轮的后方,用于运输采下的蒜薹到收集箱位置;所述的收集箱安装在机架的最后方,用于收集采下的蒜薹。
12、本发明基于视觉识别的蒜薹采收机的采收方法,包括如下步骤:
13、(1)定位对行:机器移动至蒜薹大田起始位置,对准蒜薹,自走轮转动向前行进,蒜薹根部会在分禾装置的作用下汇拢至单行采收单元的中心位置;
14、(2)根部夹断:机器继续向前行进,蒜薹相对机器向后运动,在经过夹根装置的位置时由于蒜薹和假茎的韧性存在较大差异,故夹根装置会夹断蒜薹而不会夹断假茎,同时在夹根装置的夹根盘上分布着细小的刺针,在夹断蒜薹的同时会在夹断位置的假茎上留下细小的孔洞,避免了抽薹真空的产生;
15、(3)定向输送:根部切断后,采收机继续向前行进,蒜薹进入两螺旋毛刷辊的中间,此时蒜薹的倾伏状态受机器向前推的速度和螺旋毛刷辊向后输送速度的共同影响,当两个速度一致时蒜薹会呈竖直状态向后输送;
16、(4)排叶过程:蒜薹呈竖直状态输送至排叶装置位置时,排叶装置风机启动,形成强气流场,叶片会在风场的作用下吹向一侧,同时蒜薹仅会产生小幅度的弯曲,实现蒜苔与叶片的分离;
17、(5)感知过程:蒜薹进入感知装置检测范围后,感知相机检测蒜薹植株第一叶位置并得出其纵向坐标数据后发送至采收装置;
18、(6)采收过程:采收装置接收纵向坐标数据后,直线模组滑块移动至纵向坐标位置,随着蒜薹继续向后运输,蒜薹卷入到采收装置的采收轮,采收轮旋转,蒜薹从假茎中抽出;
19、(7)蒜薹集箱:抽出的蒜薹在经过收集装置的卸薹板时,蒜薹从采收轮的夹紧状态解除落在输送带上,随即蒜薹被输送带向后运输下落至收集箱处。
20、与现有技术相比,本发明的有益效果是:
21、1.本发明在采收蒜薹时通过应用机器视觉感知技术可以做到对蒜薹的精准采收,确保了采收成功率,降低了损伤率;
22、2.本发明在采收蒜薹过程中,利用蒜薹和叶片的迎风面积不同,通过风机高速气流将蒜薹与叶片分离,便于单独对蒜苔进行夹持作业,避免损伤大蒜叶片且有利于机器视觉识别。
23、3.本发明的蒜薹采收过程动态连续,采收作业不需要停车且单行可同时进行多个蒜薹不同采收步骤的处理,通过采收轮独特的楔形槽结构可以保证采收轮在任意位置都可以对蒜薹进行有效的夹持,这进一步的保证了采收过程的连续性。
- 还没有人留言评论。精彩留言会获得点赞!