一种水陆两用的芦苇联合收获机底盘装置及控制方法和收获机
本发明属于农机设备,特别涉及一种水陆两用的芦苇联合收获机底盘装置及控制方法和收获机。
背景技术:
1、国内有九大主要芦苇产区:1、白洋淀芦苇产区;2、新疆博斯腾芦苇产区;3、东北松嫩平原芦苇产区;4、黑龙江三江平原地区;5、内蒙乌梁素海芦苇产区;6、辽宁盘锦芦苇产区;7、江苏盐城产区、射阳的海滨产区、河口附近的苇场;8、洞庭湖、洪湖的苇场;9、鄱阳湖芦苇产区,其多为旱地芦苇与沼泽地芦苇,除旱地外,大多种植地含水率较高,若采用常用履带设备会导致履带在机身与料箱作物的重力下下陷,使得无法继续通行,现有履带装置一般适用于旱地或含水率不高的泥地,不适用含水率较高的泥地以及沼泽与河滩,比如公开号为cn 220883959u的一种可用于水陆的履带,采用单边履带与中间储水腔体构成,可适用于旱地与含水率不高的泥地以及河滩,但在含水率较高的泥地与沼泽容易下陷导致行进困难,公开号为cn114683785a的一种水与湿地的芦苇收获船,但这种在船体两侧底部位置设置有螺旋滚轮作为行走机构,但滚轮与地面接触面积太小(特别是在硬地收获时),也会加剧设备的下陷程度,并且该种收割船的整个底盘系统支承力太小,不适合在船体增加比如打结器与堆放打捆料箱等用于芦苇后续处理的设备,因此需要设计一种通用性好的,适用于多环境、可用于水陆两用的芦苇联合收获机底盘装置。
技术实现思路
1、针对上述技术问题,本发明提供一种水陆两用的芦苇联合收获机底盘装置,可以实现在河滩、沼泽、旱地等不同环境对芦苇的收获,提高收获机的环境适应性与通过性。
2、本发明还提供一种水陆两用的芦苇联合收获机底盘装置的控制方法。
3、本发明可以根据地形环境选择单履带或者双履带,在遇到水深的河滩还可以打开叶轮与气囊,增加收获机的浮力,避免过深下陷,提高芦苇收获机的通过性。
4、本发明还提供一种包括所述水陆两用的芦苇联合收获机底盘装置的芦苇收获机。
5、注意,这些目的的记载并不妨碍其他目的的存在。本发明的一个方式并不需要实现所有上述目的。可以从说明书、附图、权利要求书的记载中抽取上述目的以外的目的。
6、本发明是通过以下技术手段实现上述技术目的的。
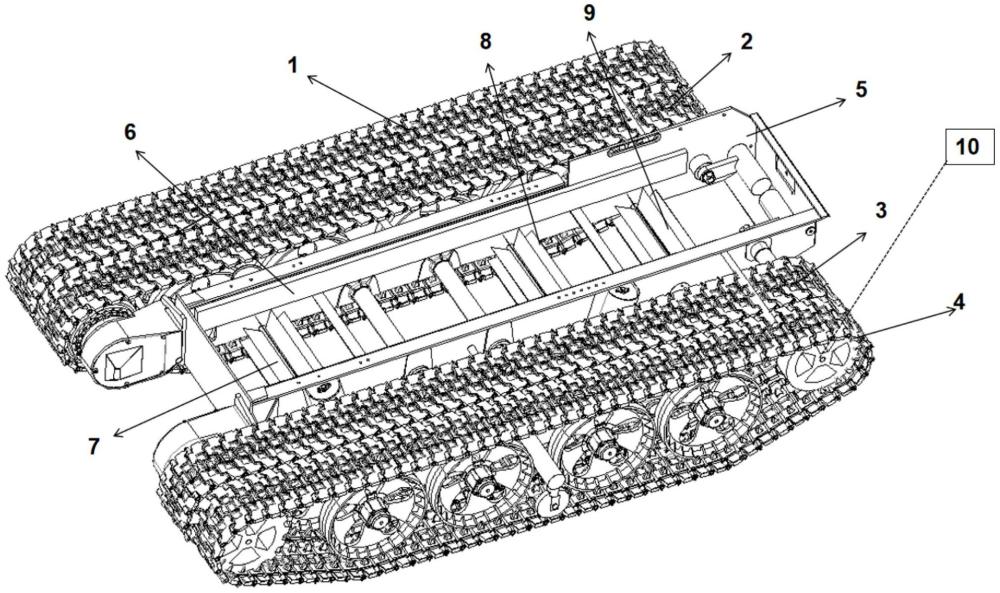
7、一种水陆两用的芦苇联合收获机底盘装置,包括左外履带机构、左内履带机构、右内履带机构、右外履带机构、履带底盘连接支架、气囊、叶轮、检测机构和控制单元;所述左外履带机构、左内履带机构位于履带底盘连接支架的左侧,右内履带机构、右外履带机构位于履带底盘连接支架的右侧;气囊安装在履带底盘连接支架的内侧,叶轮安装在履带底盘连接支架的内侧且位于气囊的下方;所述检测机构用于至少检测左外履带机构、左内履带机构、右内履带机构、右外履带机构至原始地面的距离,并传递给控制单元;所述左外履带机构、右外履带机构分别设有升降机构;所述控制单元分别与检测机构、升降机构、叶轮连接,控制单元计算出下陷深度,将下陷深度与预设值进行对比,并根据对比结构控制升降机构调节左外履带机构和右外履带机构的升降。
8、上述方案中,所述左内履带机构和右内履带机构的结构相同,所述右内履带机构包括第一主动轮、第一从动轮、从动轮连接机构、主动轮连接机构、以及若干个第一负重轮、第一负重轮连接机构、第一履带条、第一主动轮驱动机构、第一从动轮转轴;所述第一主动轮和第一从动轮位于第一履带条的两端,若干个第一负重轮位于第一主动轮和第一从动轮之间、其与第一履带条的内侧接触,第一主动轮与第一主动轮驱动机构连接,第一主动轮驱动机构通过主动轮连接机构与履带底盘连接支架连接;第一主动轮通过从动轮连接机构与履带底盘连接支架连接;第一负重轮通过第一负重轮固定板连接,第一负重轮固定板通过第一负重轮连接机构与履带底盘连接支架连接。
9、上述方案中,所述左外履带机构与右外履带机构的结构相同,所述右外履带机构包括第二主动轮、主动轮升降机构、第二主动轮连接机构、第二从动轮、从动轮升降机构、第二从动轮连接机构、若干个第二负重轮、第二负重轮连接机构、负重轮升降机构、第二主动轮驱动机构、第二从动轮转轴和第二履带条;
10、上述方案中,所述第二主动轮和第二从动轮位于第二履带条的两端,第二主动轮与第二主动轮驱动机构连接,第二主动轮驱动机构与主动轮升降机构的一端连接,主动轮升降机构的另一端与第二主动轮连接机构连接,第二主动轮连接机构与履带底盘连接支架连接,第二从动轮与第二从动轮转轴连接,第二从动轮转轴与从动轮升降机构的一端连接,从动轮升降机构的另一端与第二从动轮连接机构连接,第二从动轮连接机构与履带底盘连接支架连接,若干个第二负重轮与第二负重轮固定板连接,第二负重轮固定板与负重轮升降机构的一端连接,负重轮升降机构的另一端与第二负重轮连接机构连接,第二负重轮连接机构与履带底盘连接支架连接。
11、进一步的,所述右外履带机构还包括支撑滑轮、滑轮固定板、滑轮升降机构、滑轮连接机构;支撑滑轮与滑轮固定板连接,滑轮固定板与滑轮升降机构的一端连接,滑轮升降机构的另一端与滑轮连接机构连接,滑轮连接机构与第二负重轮固定板连接。
12、上述方案中,所述检测机构包括第一深度传感器,第一深度传感器设置在第一从动轮转轴上,所述第一深度传感器用于第一从动轮转轴中心到原始地面的距离h,并将信号传递给控制单元。
13、上述方案中,所述检测机构还包括第二深度传感器、滑轮深度传感器和位移传感器;所述主动轮升降机构、从动轮升降机构、负重轮升降机构上分别安装有位移传感器,位移传感器用于检测负重轮升降机构的位移,第二主动轮中心安装有第二深度传感器,第二深度传感器用于检测第二主动轮中心至原始地面的距离h1,支撑滑轮中心安装有滑轮深度传感器,滑轮深度传感器用于检测支撑滑轮中心与地面的距离h5。
14、一种收获机,包括所述的水陆两用的芦苇联合收获机底盘装置。
15、一种根据所述的水陆两用的芦苇联合收获机底盘装置的控制方法,包括以下步骤:
16、当芦苇收获机在旱地或者含水率较低的泥地上行进作业时,采用单履带形式,左内履带机构和右内履带机构与地面接触支撑机身前进,左外履带机构和右外履带机构通过升降机构提升成悬空状态,控制滑轮升降机构下降支撑滑轮与地面接触;
17、当芦苇收获机在沼泽或者含水率较高的泥地上行进作业时,履带下陷,当下陷深度z大于预设值时,采用双履带形式,控制单元控制升降机构使第二履带条下降,且内外两个履带保持在同一水平位置,控制负重轮升降机构使得第二负重轮下降,控制滑轮升降机构提升支撑滑轮。
18、上述方案中,当芦苇收获机在沼泽或者含水率较高的泥地上行进作业时,履带下陷,所述第一深度传感器检测第一从动轮转轴中心到原始地面的距离h,并将信号传递给控制单元,下陷深度为z,z=c-h,c为第一从动轮转轴中心到履带底面距离,当下陷深度z大于预设值时,采用双履带形式,第二深度传感器检测第二主动轮中心至原始地面的距离h1,外侧履带底面至原始地面的距离则为h2=h1-c,控制单元控制从动轮升降机构、主动轮升降机构使第二履带条下降至h3=h2+z=h1-h,使得内外两个履带保持在同一水平位置;控制单元控制负重轮升降机构使得第二负重轮下降到h4=h3-e,e为第二负重轮与第二主动轮之间的竖直中心距,位移传感器检测负重轮升降机构的位移;控制单元控制支撑滑轮提升,当滑轮深度传感器检测支撑滑轮中心与地面的距离h5=2r时停止升高,r为支撑滑轮的半径。
19、上述方案中,还包括以下步骤:
20、当芦苇收获机在河滩里进行芦苇收获作业时,此时水区淹没过履带,将气囊打开,控制单元控制叶轮转动。
21、与现有技术相比,本发明的有益效果是:
22、本发明采用双履带解决了单履带在沼泽地收获芦苇时,履带下陷严重,影响正常行进收获的问题,且内外两侧履带分开驱动,当在旱地收获时,可将外侧履带升高停用,避免动力浪费,同时增加支撑滑轮与地面接触,对外侧履带起到支撑作用。本发明在河滩与水沟里收获芦苇时,气囊充气填满中间空档,叶轮开始运动工作,使得芦苇收获装备可浮于表面不下沉,完成芦苇在河滩的收获。本发明适用于我国旱地、沼泽、河滩芦苇的收获,适应性强。
23、注意,这些效果的记载不妨碍其他效果的存在。本发明的一个方式并不一定必须具有所有上述效果。可以从说明书、附图、权利要求书等的记载显而易见地看出并抽出上述以外的效果。
- 还没有人留言评论。精彩留言会获得点赞!