一种针对玉米地杂草的精准定位喷药装置及其方法
本发明涉及杂草去除,具体而言,涉及一种针对玉米地杂草的精准定位喷药装置及其方法。
背景技术:
1、据统计,玉米田杂草多达136种,其中优势杂草以马唐、反枝苋、稗、马齿苋、藜、狗尾草、铁苋菜、刺儿菜、田旋花等为主。其中单子叶杂草有:马唐,稗,狗尾草,双子叶杂草有:反枝苋,马齿苋,藜,铁苋菜,刺儿菜,田旋花。当前除草剂主要包括以下几种类别,酰胺类除草剂、三氮苯类除草剂、苯氧羧酸类除草剂、磺酰脲类除草剂各除草剂。其中,硝磺草酮、苯坐草酮对单子叶杂草效果良好。激素类,2,4-d异辛酷、甲四氯、氯氟此氧乙酸对双子叶杂草效果良好。
2、然而,当选择除草剂时,目标田地中既存在单子叶杂草,也存在双子叶杂草。因此我们往往需要选择多种除草剂来达到全面除草的效果。对于这些不同的除草剂,通常采用混合喷洒的方式。混合喷洒,是将多种药混合在一起喷洒的方法,混合喷药可能对周围的非目标植物产生不必要的伤害,包括野生植物、花卉和其他有用的植物,影响生态平衡,同时可能导致药剂残留物在土壤中积累,对土壤微生物和其他土壤生态系统产生负面影响,破坏土壤的生态平衡,导致土壤质量下降和生物多样性的减少,另外,有些农作物对某些除草剂有较强的敏感性,混合喷药可能使农作物更容易受到损害,影响产量和质量。
技术实现思路
1、为解决上述问题,本发明的目的在于提供一种针对玉米地杂草的精准定位喷药装置及其方法。
2、一种针对玉米地杂草的精准定位喷药装置,包括:
3、喷药机本体,所述喷药机本体上设置有单子叶除草剂药箱1和双子叶除草剂药箱2;
4、单子叶药液药管3,经过药泵3与所述单子叶除草剂药箱1连通;
5、双子叶药液药管8,经过药泵3与所述双子叶除草剂药箱2连通;
6、工控机4,分别与摄像机6和所述药泵3通信连接,用于接收摄像机6采集的目标田地图像,并识别出目标田地图像中所含杂草的类型和位置,从而控制药泵3使单子叶药液药管3向单子叶杂草喷洒出单子叶除草剂,控制药泵3使双子叶药液药管8向双子叶杂草喷洒出双子叶除草剂。
7、本发明还提供了一种针对玉米地杂草的精准定位喷药方法,包括:
8、步骤1:获取单子叶杂草和双子叶杂草的图像数据;
9、步骤2:对所述图像数据进行标注和预处理得到训练样本图像;
10、步骤3:将所述训练样本图像输入到yolo模型中进行训练得到杂草类型识别模型;
11、步骤4:使用摄像机采集目标田地图像;
12、步骤5:将目标田地图像输入到杂草类型识别模型中得到目标田地图像中所含杂草的类型;
13、步骤6:从目标田地图像中确定杂草的位置信息;
14、步骤7:对所述目标田地图像进行分割得到杂草图像;
15、步骤8:基于杂草图像计算的杂草的占地面积;
16、步骤9:根据杂草的占地面积及其杂草的类型向相应位置处的杂草成比例喷洒单子叶除草剂或者双子叶除草剂。
17、优选的,所述步骤2:对所述图像数据进行标注和预处理得到训练样本图像,包括:
18、步骤2.1:对所述图像数据进行去噪得到去噪后的图像数据;
19、步骤2.2:根据去噪后的图像数据中每个点的亮度值计算亮度修正系数;
20、步骤2.3:根据亮度修正系数计算对比度增强系数;
21、步骤2.4:根据所述亮度修正系数和所述对比度增强系数对去噪后的图像数据进行增强得到增强后的图像数据;
22、步骤2.5:对增强后的图像数据中所含杂草的类型进行标注得到训练样本图像。
23、优选的,所述步骤2.2:根据去噪后的图像数据中每个点的亮度值计算亮度修正系数,包括:
24、步骤2.2.1:使用多个高斯滤波器的输出均值作为去噪后的图像数据中每个像素点的基准值;其中,基准值的计算公式为:
25、
26、其中,表示使用第i个高斯滤波器gi(i,j)输出的值,i(x+i,y+j)表示去噪后的图像在点(x+i,y+j)处的亮度值,σ表示高斯函数的标准差,n表示高斯滤波器的个数,k表示滤波器的大小;
27、步骤2.2.2:根据每个像素点的基准值及其亮度值计算亮度修正系数;其中,所述亮度修正系数为:
28、
29、其中,o(x,y)表示亮度修正系数,i(x,y)表示去噪后的图像在点(x,y)处的亮度值,α表示可调系数。
30、优选的,所述步骤2.4:根据所述亮度修正系数和所述对比度增强系数对去噪后的图像数据进行增强得到增强后的图像数据,包括:
31、采用公式:
32、
33、对去噪后的图像数据进行增强得到增强后的图像数据;其中,r′(x,y)表示增强后的图像在r通道的像素值,g′(x,y)表示增强后的图像在g通道的像素值,b′(x,y)表示增强后的图像在b通道的像素值,s(x,y)表示增强权重,p表示对比度调整系数,λ表示增强度系数。
34、优选的,所述步骤6:从目标田地图像中确定杂草的位置信息,包括:
35、步骤6.1:对目标田地图像进行二值化处理得到二值化的田地图像;
36、步骤6.2:求解二值化的田地图像中所含杂草图形的最小外界矩形;
37、步骤6.3:根据杂草图形的最小外界矩形确定杂草的位置信息;
38、步骤6.4:计算玉米的种植位置与杂草位置之间的距离;
39、步骤6.5:若玉米的种植位置与杂草位置之间的距离在预设范围内,则将相应位置处的杂草当做误识别处理,并将误识别的杂草修改为玉米苗。
40、优选的,所述步骤8:基于杂草图像计算的杂草的占地面积,包括:
41、步骤8.1:使用杂草图像像素点在多个方向的梯度幅值构建边缘检测矩阵;其中,边缘检测矩阵为:
42、
43、其中,rx表示杂草图像r通道的像素点在x方向上的梯度幅值,gx表示杂草图像g通道的像素点在x方向上的梯度幅值,bx表示杂草图像b通道的像素点在x方向上的梯度幅值,ry表示杂草图像r通道的像素点在y方向上的梯度幅值,gy表示杂草图像g通道的像素点在y方向上的梯度幅值,by表示杂草图像b通道的像素点在y方向上的梯度幅值,r45表示杂草图像r通道的像素点在45°方向上的梯度幅值,g45表示杂草图像g通道的像素点在45°方向上的梯度幅值,b45表示杂草图像b通道的像素点在45°方向上的梯度幅值,r135表示杂草图像r通道的像素点在135°方向上的梯度幅值,g135表示杂草图像g通道的像素点在135°方向上的梯度幅值,b135表示杂草图像b通道的像素点在135°方向上的梯度幅值;
44、步骤8.2:基于边缘检测矩阵的特征值确定相应像素点的全局梯度幅值;
45、步骤8.3:利用像素点的全局梯度幅值完成杂草图像的边缘检测得到杂草边界图像;
46、步骤8.4:根据杂草边界图像的面积确定杂草的占地面积。
47、优选的,所述步骤8.3:利用像素点的全局梯度幅值完成杂草图像的边缘检测得到杂草边界图像,包括:
48、步骤8.3.1:计算像素点的梯度幅角;
49、步骤8.3.2:判断任意像素点在梯度幅角方向上的相邻位置处像素点的全局梯度幅值的大小;其中,梯度幅角方向计算公式为:
50、
51、其中,θ表示梯度幅角方向;
52、步骤8.3.3:将全局梯度幅值最大的像素点作为候选边缘点;
53、步骤8.3.4:将全局梯度幅值在预设范围内的候选边缘点作为边缘点,得到杂草边界图像。
54、本发明还提供了一种电子设备,包括总线、收发器、存储器、处理器及存储在所述存储器上并可在所述处理器上运行的计算机程序,所述收发器、所述存储器和所述处理器通过所述总线相连,其特征在于,所述计算机程序被所述处理器执行时实现上述的一种针对玉米地杂草的精准定位喷药方法中的步骤。
55、本发明还提供了一种计算机可读存储介质,其上存储有计算机程序,其特征在于,所述计算机程序被处理器执行时实现上述的一种针对玉米地杂草的精准定位喷药方法中的步骤。
56、本发明提供的一种针对玉米地杂草的精准定位喷药装置的有益效果在于:与现有技术相比,本发明运用图像识别技术让工控机识别出单子叶杂草和双子叶杂草,可以针对不同杂草的类型和面积进行针对性的喷药,从而可以减少药剂的使用量,降低农作物的农药残留,提高农产品的质量和安全。
57、为使本发明的上述目的、特征和优点能更明显易懂,下文特举较佳实施例,并配合所附附图,作详细说明如下。
58、附图说明
59、为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
60、图1示出了本发明实施例所提供的一种针对玉米地杂草的精准定位喷药装置的后视图;
61、图2示出了本发明实施例所提供的一种针对玉米地杂草的精准定位喷药装置的俯视图;
62、图3示出了本发明实施例所提供的一种针对玉米地杂草的精准定位喷药装置的喷药组件局部放大图;
63、图4示出了本发明实施例所提供的一种针对玉米地杂草的精准定位喷药装置的左视图;
64、图5示出了本发明实施例所提供的一种针对玉米地杂草的精准定位喷药装置的右视图;
65、图6示出了本发明实施例所提供的一种针对玉米地杂草的精准定位喷药装置的工控机结构图;
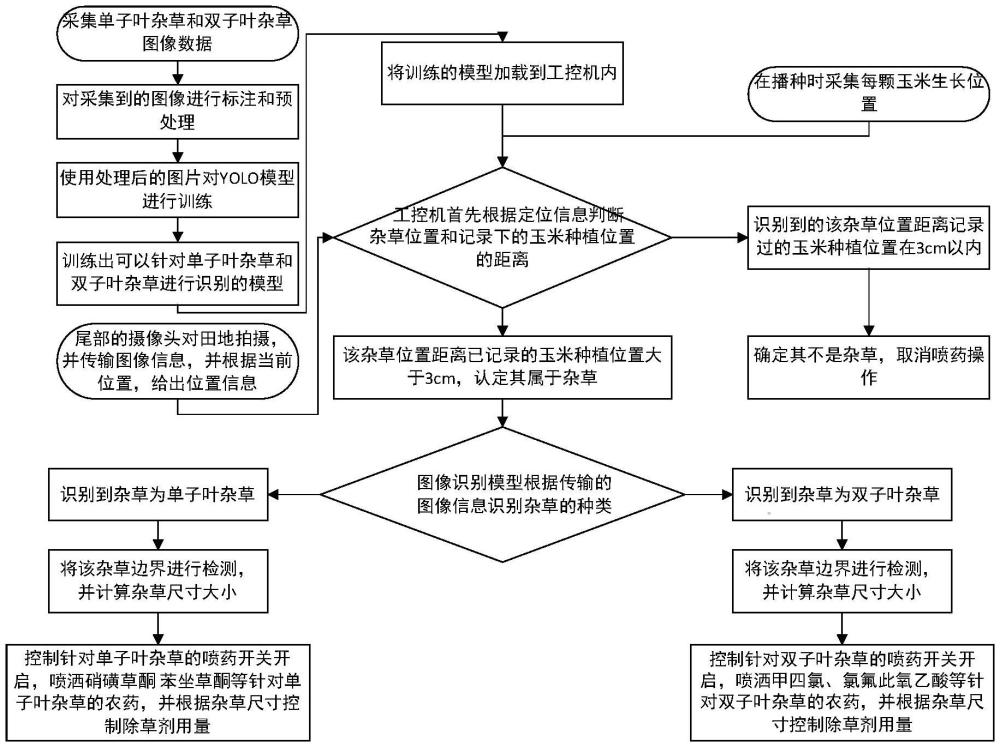
66、图7示出了本发明实施例所提供的种针对玉米地杂草的精准定位喷药流程图;
67、图8示出了本发明实施例所提供的yolo模型图;
68、图9示出了本发明实施例所提供的寻找杂草根部几何位置流程图;
69、图10示出了本发明实施例所提供的杂草位置信息计算原理图;
70、图11示出了本发明实施例所提供的杂草位置和玉米位置计算原理图。
- 还没有人留言评论。精彩留言会获得点赞!