一种果园自走式多传感器的全覆盖割草机控制系统及方法
本发明涉及农业机械领域,一种果园自走式多传感器的全覆盖割草机控制系统及方法。
背景技术:
1、随着我国林果业的发展,大规模的果园逐渐变多,但果园中的杂草与果树竞争养分,破坏土壤结构,为管理者增加管理难度。
2、传统的果园割草机主要依靠人工操作,不仅劳动强度大,而且效率低下,难以满足大规模果园的除草需求。
3、目前市面上的果园割草机割草范围有限,缺少对作业区域的路线规划,无法实现对果园的全覆盖割草,也无法识别作业边界。
4、目前市面上的割草机搭载的传感器较为单一,无法精准识别定位障碍物,避障算法不够精确,无法实现动态障碍物的躲避,导致安全性能低。
技术实现思路
1、本发明的目的在于提供一种果园自走式多传感器的全覆盖割草机控制系统及方法,能够在果园内自主导航作业,实现对果园区域的全覆盖除草,并且能够实时避障,具有较好的稳定性与安全性,降低人工成本的同时可以提高果园除草作业的效率。
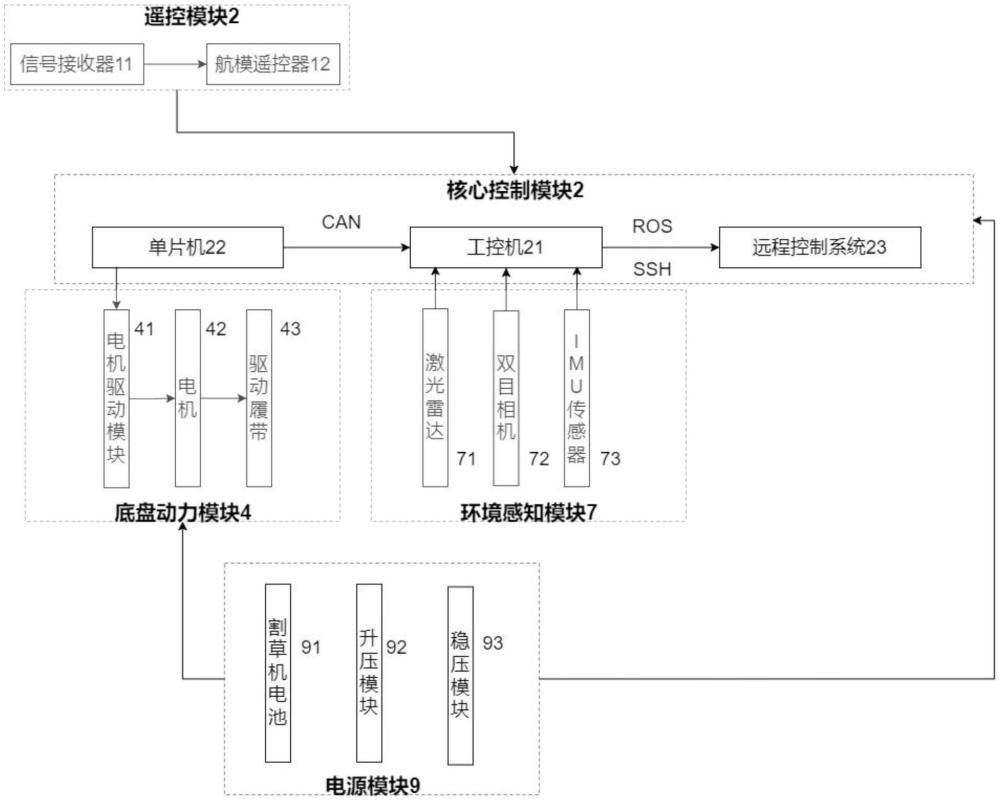
2、第一方面,本发明的目的在于提供一种果园自走式多传感器的全覆盖割草机控制系统,该控制系统包括:电源模块9,所述电源模块9为果园自走式多传感器的全覆盖割草机控制系统提供电力,还包括核心控制模块2,底盘动力模块4、环境感知模块7和遥控模块1,所述核心控制模块2包括工控机21、单片机22以及远程控制系统23;所述工控机21与所述单片机22之间采用can总线相互连接,并实现信息交换,在同一局域网络环境下,操作者通过ssh协议远程登陆所述工控机21并启动机器人操作系统,实现对系统的分布式远程控制;
3、所述底盘动力模块4包括电机驱动模块41、电机42以及驱动履带43;所述电机驱动模块41通过电机42接口与所述电机42的引脚连接,且所述电机驱动模块41的驱动信号引脚与所述单片机22的gpio引脚相连,所述电机42与所述驱动履带43机械结构连接;
4、所述环境感知模块7包括激光雷达71、双目相机72、以及imu传感器73惯性导航传感器;所述激光雷达71与双目相机72安装在割草机的前方正中间位置,所述激光雷达71、双目相机72及imu传感器73通过与所述工控机21连接实现果园内障碍物与边界的识别,并实现避障,imu传感器73安装在割草机的中心位置,并与割草机的对称轴对齐,imu传感器73实现割草机位姿检测,实现割草机位姿的调整,所述激光雷达71、双目相机72及imu传感器73共同向所述工控机21传送信息,所述工控机21采用多传感器耦合和路径规划与避障决策算法进行信息处理和数据运算,确定障碍物的种类与位置,调整位姿,生成针对所述割草机所在的作业区的控制信息,并将所述控制信息通过所述单片机22传输到所述电机驱动模块41中,进而控制所述割草机按照所述控制信息进行果园全覆盖作业和实现实时避障动作;
5、所述遥控模块1包括航模遥控器12和信号接收器11,所述信号接收器11与所述单片机22相互连接并实现信息传递,所述信号接收器11与所述航模遥控器12相互通信通过实现信号传递。
6、其中,所述电源模块9包括割草机电池91、升压模块92以及稳压模块93;其中,所述割草机电池91连接所述电机驱动模块41,所述割草机电池91为所述电机42运转供电,所述升压模块92连接所述割草机电池91,将电压升高后通过电源线为所述工控机21供电;所述稳压模块93连接所述割草机电池91,将电压稳压后为所述单片机22供电。
7、作为本技术方案的进一步限定,具体包括以下步骤:
8、s1、所述割草机控制系统的硬件进行初始化;
9、s2、所述激光雷达数据与所述双目相机的数据耦合;
10、s3、所述遥控模块操作割草机进行沿边学习;
11、s4、基于所述栅格法生成环境地图;
12、s5、确定边界后进行作业区域的所述全覆盖路径规划;
13、s6、根据所述环境感知模块与所述底层模块驱动割草机进行全覆盖割草作业以及自主实时避障,完成作业。
14、作为本技术方案的进一步限定,所述步骤s1中具体包括:
15、s101、启动所述电源模块;
16、s102、所述割草机电池为底盘动力模块供电,所述升压模块对所述割草机电池进行升压操作后为所述工控机供电,所述工控机启动并完成初始化;所述稳压模块对所述割草机电池进行稳压操作后为所述单片机供电,所述单片机启动并完成初始化;
17、s103、所述工控机通过usb连接为所述激光雷达、所述双目相机和所述imu传感器供电,与所述激光雷达、所述双目相机与所述imu传感器启动并完成初始化;
18、s104、所述工控机与所述单片机通过can总线进行连接并开始通信;
19、s105、在同一局域网络环境下,操作者通过ssh协议远程登陆所述工控机并启动机器人操作系统,实现对系统的分布式远程控制;
20、作为本技术方案的进一步限定,所述步骤s2具体包括:
21、s201、完成所述激光雷达与所述双目相机的联合标定,得到所述激光雷达与所述双目相机的空间转换关系,输出联合标定的参数文件;
22、s202、所述激光雷达获取周围环境信息传输至所述工控机,计算所述割草机距离障碍物的距离;
23、s203、所述双目相机获取周围环境信息传输至所述工控机,识别障碍物类别并计算出障碍物的深度信息;
24、s204、运行扩展卡尔曼滤波器将所述激光雷达信号与所述双目相机输出的数据进行耦合,并输出耦合数据。
25、作为本技术方案的进一步限定,所述步骤s3具体包括:
26、s301、用户操作远程控制终端远程运行沿边学习launch文件,进入遥控模式;s302、由用户操作航模遥控器驱动割草机延作业区域边界与果园中不可通行区域(果园中摆放农具的房屋、排水沟等)边界行驶,通过沿边学习在地图中标出作业边界与果园中不可通行区域;
27、s303、结束沿边学习launch文件的进程,退出遥控模式。
28、作为本技术方案的进一步限定,所述步骤s3具体包括
29、s401、用户操作所述远程控制终端远程运行建图launch文件,进入建立环境地图模式;
30、s402、所述沿边学习获得区域内边界和障碍物的坐标位置数据;
31、s403、在所述远程控制终端中启动所述机器人操作系统中的可视化插件rviz,采用所述栅格法建图的方式,根据所述割草机的大小以及作业半径,确定栅格大小;
32、s404、生成所述栅格化环境模型地图,并保存地图;
33、s405、结束所述建图launch文件的进程,退出建立环境地图模式。
34、作为本技术方案的进一步限定,所述步骤5具体包括:
35、s501、用户操作所述远程控制终端远程运行全覆盖路径规划launch文件,进入路径规划作业模式;
36、s502、读取所述环境模型地图,接入所述激光雷达和所述双目相机耦合的数据使其用以定位,并且接入所述imu传感器数据,进行所述割草机的位姿调整;
37、s503、在所述远程控制终端中启动机器人操作系统中的可视化插件rviz,用户操作所述航模遥控器驱动所述割草机前进至待作业区域用户选择的起点后,启动所述全覆盖路径规划。
38、s504、所述全覆盖路径规划根据利用单元分解法,将作业区域内的不可通行区域分解成互相不重合的单元,再根据割草机的半径以及作业半径利用生物激励神经网络的覆盖路径规划算法规划作业路径,当遇到作业死点时,利用a*算法脱困。
39、s505、结束所述全覆盖路径规划launch文件的进程,退出所述路径规划作业模式。
40、作为本技术方案的进一步限定,所述步骤6具体包括:
41、s601,用户操作所述远程控制终端远程运行自主避障launch文件,进入自主避障模式;
42、s602,读取所述环境模型地图,接入所述激光雷达与所述双目相机耦合的数据,进行所述激光雷达、双目相机和imu传感器的多传感器融合的割草机定位;
43、s603,所述双目相机利用yolov5网络检测出障碍物的种类(果树、大型石块、人等),立体匹配后采用sgbm算法算出目标障碍物的深度信息,再与所述激光雷达所测到的所述障碍物的距离信息相耦合,提高定位的精确性。
44、s604,所述割草机遇到障碍物时,启用局部路径规划teb算法,准确避过所述障碍物,并回到原来的作业路径上;
45、s605,所述工控机将计算后的数据传输到所述单片机,所述驱动底盘动力模块采取相应的动作,实现所述割草机实时避障;
46、s606,当所述割草机在所述果园作业区域内完成全覆盖作业后,所述割草机停止到作业终点,全覆盖除草作业结束。
47、与现有技术相比,本发明能够取得如下有益效果:
48、1)本发明提供的一种果园自走式多传感器的全覆盖割草机控制系统中通过对目标果园的环境信息的感知,核心控制模块构建割草机在目标果园作业区域的作业边界,并精确完成割草机在目标果园中的定位;
49、2)本发明提供的一种果园自走式多传感器的全覆盖割草机控制方法中通过栅格法建立环境模型地图,定位准确,标明不可通行区域,提高割草机的通过率。
50、3)本发明提供的一种果园自走式多传感器的全覆盖割草机控制方法通过遥控模块与环境感知模块确定了作业边界与不可通行区域,利用单元分解算法实现了对果园的障碍物与不可通行区域的划分,利用生物激励算法进行全覆盖割草作业,覆盖率高,高效实现果园割草;
51、4)本发明提供的一种果园自走式多传感器的全覆盖割草机控制方法,充分结合果园的实际地形环境,对割草机的前进方向和前进姿态进行实时灵活调整;5)本发明提供的控制方法采用多传感器信息耦合,定位精准、避障稳定性高,能广泛应用于果园进行自主割草作业。
- 还没有人留言评论。精彩留言会获得点赞!