一种具有调节结构的养殖笼用饲料槽及预测投料控制方法与流程
本发明是关于饲料槽,特别是关于一种具有调节结构的养殖笼用饲料槽及预测投料控制方法。
背景技术:
1、种鸡养殖是指饲养起来专门用以供应鸡肉的鸡,人们饲养种鸡的主要课题是提高种鸡质量和保持或提高种鸡的肥美,并提高鸡肉品质,通常在一些散养的养殖场内,种鸡一般是需要在白天放出去,晚上要将其聚拢在一起,主要聚拢在养殖笼内部,并且在养殖笼的表壁悬挂有饲料槽,在喂养种鸡时,将饲料放置在饲料槽内部喂养。
2、在对种鸡喂养时,在种鸡养殖笼外表壁悬挂饲料槽,种鸡饲料放置在饲料槽内部进行种鸡的喂养,但由于种鸡养殖笼的尺寸不相同,现有的饲料槽长度确定,对于不同尺寸的种鸡养殖笼悬挂饲料槽时,若是种鸡养殖笼的长度大于饲料槽的长度,则会出现饲料槽与种鸡养殖笼不匹配的问题,导致饲料槽无法适应于不同尺寸的种鸡养殖笼,现亟需设置一种可调节自身长度的饲料槽用于适应不同尺寸的种鸡养殖笼。
技术实现思路
1、为了克服现有的问题,本技术实施例提供一种具有调节结构的养殖笼用饲料槽及预测投料控制方法,设置有第一料槽以及第二料槽,且第二料槽滑动连接在第一料槽内部,并且第一料槽两侧均开设有限位槽,第二料槽与限位槽对应位置处设有限位杆,在第一料槽以及第二料槽相互拉伸时,通过限位杆在限位槽内部滑动,可以避免第一料槽与第二料槽出现折弯的问题,并且拉伸后的饲料槽可以适应不同尺寸的养殖笼进行悬挂,提升了该饲料槽的实用性。
2、本技术实施例解决其技术问题所采用的技术方案是:
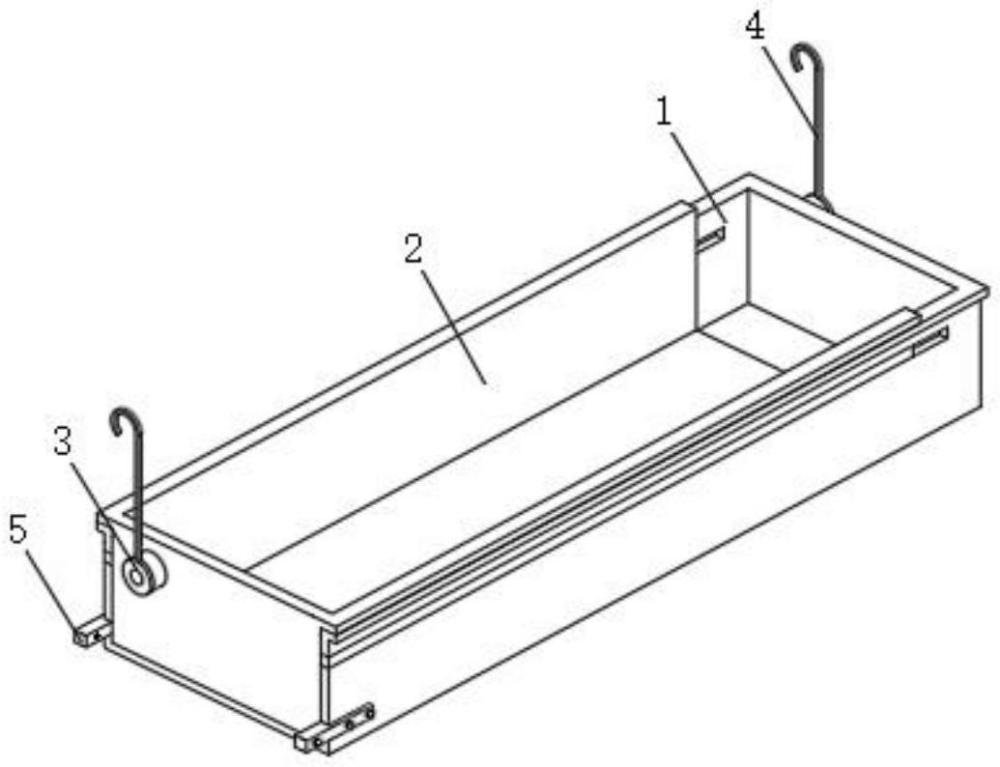
3、一种具有调节结构的养殖笼用饲料槽,包括第一料槽以及设置于所述第一料槽上方的第二料槽,所述第二料槽内凹在所述第一料槽内部,且所述第一料槽以及所述第二料槽为可相互拉伸的结构;
4、其中,所述第一料槽位于所述第二料槽一端两侧各设有一个限位组件,两个所述限位组件与所述第一料槽为可拆卸连接,所述限位组件包括与所述第一料槽连接的第一支板,还包括与所述第二料槽连接的第二支板,在所述第一料槽与所述第二料槽处于拉伸后,所述限位组件将拉伸后的第一料槽以及第二料槽连接,设置有第一料槽以及第二料槽,且第二料槽滑动连接在第一料槽内部,并且第一料槽两侧均开设有限位槽,第二料槽与限位槽对应位置处设有限位杆,在第一料槽以及第二料槽相互拉伸时,通过限位杆在限位槽内部滑动,可以避免第一料槽与第二料槽出现折弯的问题,并且拉伸后的饲料槽可以适应不同尺寸的养殖笼进行悬挂,提升了该饲料槽的实用性。
5、优选的,所述第一料槽下表面设有支撑组件,所述支撑组件包括与所述第一料槽连接的支撑板,所述支撑板以与所述第一料槽连接处为轴心可旋转,所述支撑板一端内凹有凹槽,所述凹槽内部内凹有与所述凹槽尺寸相同的顶板,所述顶板底端设有旋转柱;
6、其中,在所述旋转柱旋转下,带动所述顶板与所述凹槽分离,用于与所述第二料槽下表面相互抵接,当第一料槽与第二料槽拉伸后,第一料槽底端的支撑组件与第一料槽连接处为轴心旋转,支撑组件一端的顶板移动到第二料槽底端,之后转动顶板底端的旋转柱,带动顶板与第二料槽相互抵接,对第二料槽底端起到支撑的作用,并且顶板可以内凹在凹槽内部,这样在支撑组件旋转到第一料槽下表面时,顶板不会与第一料槽相互接触。
7、优选的,所述限位组件还包括设置在所述第一支板表壁的连接件,所述第二支板内部旋转有定位件;
8、其中,所述连接件贯穿所述第一支板与所述第一料槽连接,所述定位件贯穿所述第二支板与所述第二料槽接触,第一支板与第一料槽连接,第二支板的厚度大于第一支板厚度,并且在第一支板与第一料槽连接,第二支板的侧壁位于第二料槽侧壁,在第二料槽拉动时,第二支板与第二料槽相互贴附,使得第二支板内部的定位件与第二料槽内部的定位孔连接,达到限位的作用。
9、优选的,所述第一料槽一端设有第一悬挂件,所述第二料槽远离所述第一悬挂件一端设有第二悬挂件,第一悬挂件以及第二悬挂件均为可旋转结构,且第一悬挂件以及第二悬挂件顶端均设有弯钩,第一悬挂件以及第二悬挂件顶端的弯钩与养殖笼卡接连接,可以使得第一料槽以及第二料槽与养殖笼连接紧密,不会出现脱落的问题发生。
10、优选的,所述第一料槽侧壁开设有限位槽,所述第二料槽位于所述限位槽对应位置处设有限位杆,所述第一料槽顶端一周处设有第一承台,第一承台的长度小于第二承台的长度,这样在第一料槽与第二料槽相互叠合时,第二承台可以置于第一承台上表面;
11、其中,所述限位杆内凹与所述限位槽内部,所述限位杆的尺寸与所述限位槽的尺寸相同,在第一料槽以及第二料槽相互拉伸时,通过限位杆在限位槽内部滑动,可以避免第一料槽与第二料槽出现折弯的问题,并且拉伸后的饲料槽可以适应不同尺寸的养殖笼进行悬挂,提升了该饲料槽的实用性。
12、优选的,所述第二料槽表壁设有若干个定位孔,若干个所述定位孔的尺寸与所述定位件尺寸相同,第二料槽位于第二支板开设有若干个定位孔,在第二料槽拉开后通过限位组件内部的定位件与不同位置处的定位孔相互连接,对拉伸后的第二料槽进行限位,并且定位件的尺寸与定位孔尺寸相同,这样定位件与定位孔连接后对拉伸后的第二料槽进行限位,所述第二料槽顶端一周处设有第二承台第二承台与第二料槽一体式结构,在第二料槽位于第一料槽内部时,第二承台与第一料槽内部的第二承台相互贴附,从而使得第二料槽与第一料槽连接紧密。
13、优选的,所述第一料槽位于所述连接件对应位置处开设有连接孔,用于与所述连接件连接,在将限位组件连接时,取出连接件,将连接件贯穿第一支板,并且连接件与连接孔相互旋转,从而将限位组件与第一料槽连接紧密。
14、本发明的一种具有调节结构的养殖笼用饲料槽的预测投料控制方法,使用智能控制算法预测投料状态并进行自适应控制,步骤如下;
15、步骤1:数据采集;
16、部署多种类型的传感器,通过重量、距离、温湿度、摄像头收集关于饲料状态、环境条件和动物行为的数据;
17、使用滑动窗口创建特征,捕捉饲料消耗的动态变化,公式如下:
18、
19、其中,f(t)表示在时间t处计算得到的特征值,x(t-i)表示在时间t-i的数据点,w是窗口的大小,t表示时间,i表示第i个数据点,表示对窗口内的所有值进行求和;
20、从摄像头收集的图像中提取颜色、形状、纹理特征;
21、
22、其中,h(k)颜色k在直方图中的计数,c(i,j)图像中位置(i,j)的颜色,i表示行坐标,j表示纵坐标,1(c(i,j)=k)是一个指示函数,当像素的颜色等于k时返回1,否则返回0;n图像的行数,即图像的高度,m图像的列数,即图像的宽度;表示双重求和遍历了图像的所有像素,对于每个颜色k,计算整个图像中该颜色出现的次数;
23、为了处理季节性和日周期性影响,引入时间相关的特征:
24、
25、其中,day of year(t)表示时间t所在年份的第几天,s(t)和s′(t)是使用余弦和正弦来捕获一年中时间的周期性变化,cos和sin表示余弦cos和正弦;hour of day(t)表示时间t在一天中的小时数,d(t)和d′(t)是使用余弦和正弦来捕获一天中时间的周期性变化;
26、步骤2:多目标优化;
27、定义最小化成本、最大化动物健康和最大化生产效率为三个优化目标:
28、minimizef1(x)=cost(x)
29、maximizef2(x)=health(x)
30、maximizef3(x)=efficiency(x)
31、其中,f1(x),f2(x)和f3(x)分别表示成本函数值、健康函数值和效率函数值,cost(x),health(x)和efficiency(x)分别表示成本函数、健康函数和效率函数,minimize和maximize分别表示最小化和最大化;
32、将优化目标函数转换为标准形式:
33、f1(x)=cost(x)
34、f2(x)=-health(x)
35、f3(x)=-efficiency(x)
36、得到多目标优化函数为:
37、minimizef(x)=[f1(x),f2(x),f3(x)]
38、其中,minimizef(x)表示最小化多目标函数f(x),f1(x),f2(x)和f3(x)分别对应于成本、负的健康值和负的效率值;
39、使用权重w1,w2,w3来平衡不同的目标:
40、
41、fitness(x)是所有目标的适应度函数,w1,w2,w3分别对应成本、健康和效率目标的权重;
42、步骤3:投喂状态确定;
43、将饲料投喂分为增加饲料和不增加饲料两个状态,分别用1和0表示;使用支持向量机进行分类,公式如下:
44、
45、其中,w是超平面的法向量,||w||2是w的l2范数,b偏置项;m是样本数量,i是第i个样本的标签,ξi是第i个样本的松弛变量,c是正则化参数,控制误分类与间隔的权衡;
46、为了正确分类所有训练数据,约束条件为:
47、yi(wtxi+b)≥1-ξi,ξi≥0
48、其中,yi是第i个样本的标签,xi是第i个样本的特征向量,b是偏置项,ξi是第i个样本的松弛变量,wt是w的转置;
49、为了使问题更容易求解,将拉格朗日乘子转换为对偶形式,公示如下:
50、
51、其中,w是超平面的法向量,ξ是当前的松弛因子,α和r是当前的拉格朗日乘子;||w||2是w的l2范数,b偏置项;m是样本数量,i是第i个样本的标签,ξi是第i个样本的松弛变量,c是正则化参数,控制误分类与间隔的权衡;yi是第i个样本的标签,xi是第i个样本的特征向量,wt是w的转置;αi和ri是拉格朗日乘子;
52、对w,b和ξi的偏导数设为0并代回拉格朗日函数,得到对偶问题:
53、
54、对偶问题的约束为:
55、
56、其中,αi和αj分别表示第i个和第j个数据点的拉格朗日乘子;yi和yj分别表示第i个和第j个样本的特征向量;表示第i个和第j个样本的特征向量的内积,c是正则化参数,m是样本数量;
57、步骤4:自适应控制;
58、引入pid控制器到智能饲料槽系统增强饲料投喂的精确度和效率:
59、
60、其中,kp比例增益,决定了pid响应对当前误差的敏感程度,ki积分增益,对过去累积误差的响应,用以消除系统偏差,kd微分增益,预测未来误差的变化趋势,抑制系统的超调,u(t)控制器输出,即调整饲料投放的量,e(t)在时间t的误差,预期饲料需求与实际饲料消耗之间的差值,τ是变量,代表从过去到当前时间t的任意时刻,示从初始时间0到当前时间t期间误差的历史值。
61、本技术实施例的优点是:
62、1、设置有第一料槽以及第二料槽,且第二料槽滑动连接在第一料槽内部,并且第一料槽两侧均开设有限位槽,第二料槽与限位槽对应位置处设有限位杆,在第一料槽以及第二料槽相互拉伸时,通过限位杆在限位槽内部滑动,可以避免第一料槽与第二料槽出现折弯的问题,并且拉伸后的饲料槽可以适应不同尺寸的养殖笼进行悬挂,提升了该饲料槽的实用性。
63、2、在第一料槽侧壁设有限位组件,限位组件包括第一支板以及第二支板,且第一支板与第一料槽连接,第二支板的厚度大于第一支板厚度,并且在第一支板与第一料槽连接,第二支板的侧壁位于第二料槽侧壁,在第二料槽拉动时,第二支板与第二料槽相互贴附,且第二料槽位于第二支板开设有若干个定位孔,在第二料槽拉开后通过限位组件与不同位置处的定位孔相互连接,对拉伸后的第二料槽进行限位。
64、3、在第一料槽底端设有可旋转的支撑组件,当第一料槽与第二料槽拉伸后,底端的支撑组件与第一料槽连接处为轴心旋转,支撑组件一端的顶板移动到第二料槽底端,之后转动顶板底端的旋转柱,带动顶板与第二料槽相互抵接,对第二料槽底端起到支撑的作用,并且顶板可以内凹在凹槽内部,这样在支撑组件旋转到第一料槽下表面时,顶板不会与第一料槽相互接触。
65、4、智能控制算法可以根据实时数据和历史数据进行快速决策,从而提高系统的响应速度和效率。通过预测未来的需求,系统可以提前做出调整,避免资源浪费或性能瓶颈。智能控制算法能够学习和适应环境变化,自动调整控制参数,以应对不同的工作条件和环境。这种自适应能力可以使系统在各种情况下保持最佳性能。通过智能控制算法,可以实现对资源的精细管理,减少不必要的消耗,达到节能效果。智能控制算法能够处理大量数据,进行复杂的数据分析和建模,为决策提供有力的支持。
- 还没有人留言评论。精彩留言会获得点赞!