一种基于机器视觉的智能鱼苗无损分选设备及方法
本发明涉及水产鱼苗分选,特别是涉及一种基于机器视觉的智能鱼苗无损分选设备及方法。
背景技术:
1、近年来,我国水产养殖业发展迅速,各类水产苗种产量持续稳居全国前列,成为全国水产品和水产苗种生产与销售的重要集散地,而高经济肉食鱼类人工育苗阶段,同类残食行为普遍存在,是制约育苗阶段苗种存活率的主要因素之一。因此,高经济肉食鱼类鱼苗养殖前需要对其进行分选,以将不同大小的鱼苗分开养殖。一是为了减少人工分选时鱼苗受损的情况,分选出优良鲜活的鱼苗进行养殖,以提高养殖质量;二是为了更加精准的分选出不同大小的鱼苗,以避免因分选不彻底而发生大鱼残食小鱼及互相争食的情况,提高育苗养殖产量。
2、目前鱼苗分选主要依赖于人工手段,以鲈鱼为例,育苗过程一共分了三个阶段,在驯料完成后,水花达到6朝,鱼苗体长达到2-2.5厘米左右,此时鱼苗的鳞片已生长得较完整,大吃小较严重,需及时进行分筛。然而传统的鱼类分选装置大多数是对成长至一定规格的大鱼进行分选,鱼苗分选目前还停留在人工手动筛选过网阶段,由于鱼苗体积小,游速快等原因,难以达到准确且无损的鱼苗分选。
技术实现思路
1、本发明的目的是:提供一种基于机器视觉的智能鱼苗无损分选设备及方法,既能够实现鱼苗准确分选自动化,提高分选效率、降低劳动强度,还能够减少活体鱼苗损伤率,有效提升养殖效率和产品质量。
2、为了实现上述目的,本发明采用以下方案:
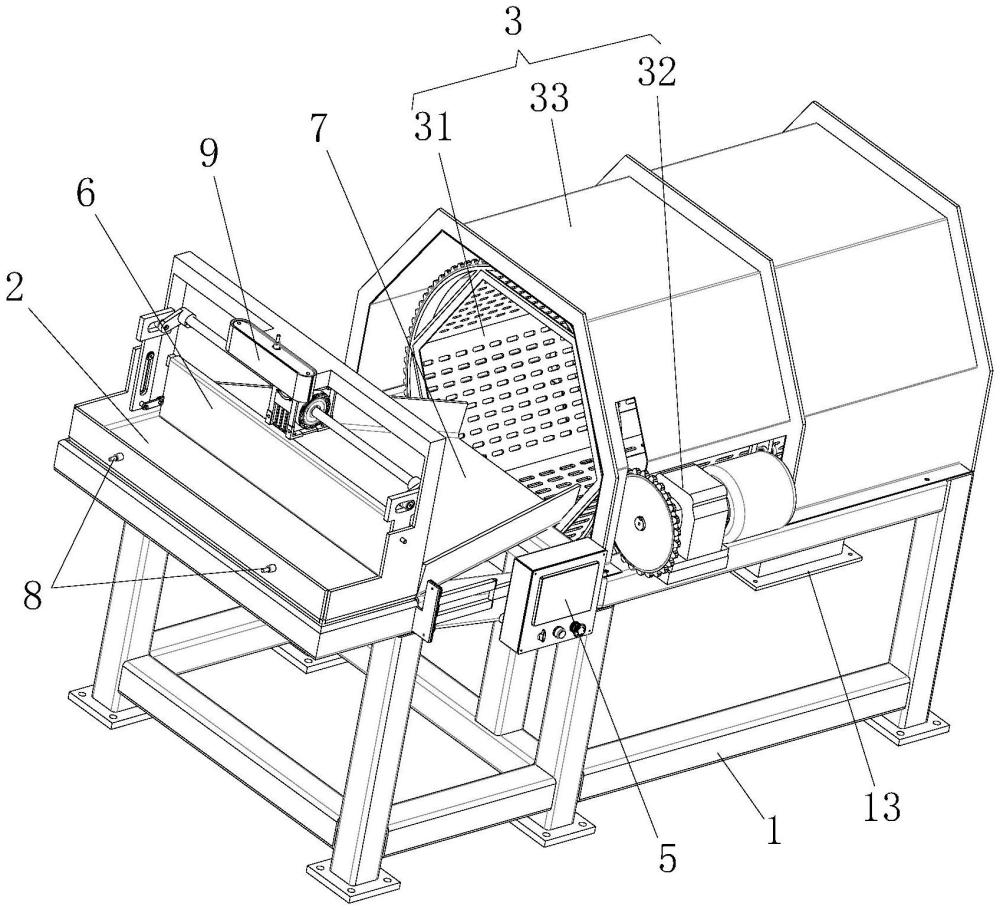
3、一种基于机器视觉的智能鱼苗无损分选设备,其包括机架、入鱼仓、分选仓、出口仓和控制台;所述入鱼仓设置在所述机架的一侧,所述分选仓和所述出口仓均设置在所述机架的另一侧,所述分选仓位于所述出口仓的上方;
4、所述入鱼仓的出口端设有电动闸门以及与所述分选仓连接的鱼苗通道,所述入鱼仓远离所述鱼苗通道的一端设有第一水流喷头,所述入鱼仓的上方架设有第一双目摄像头;
5、所述分选仓包括六方分选桶和驱动所述六方分选桶的正向或反向转动的分选桶驱动机构,所述六方分选桶可转动地设置在所述出口仓上,所述六方分选桶具有6个分选面,6个分选面上的分选孔的孔径大小不同,所述六方分选桶的内部架设有第二水流喷头和第二双目摄像头;
6、所述出口仓的底部设有泄鱼通道;
7、所述第一水流喷头和所述第二水流喷头分别与供水控制系统连接;
8、所述控制台安装在所述机架上,所述控制台分别与所述第一双目摄像头、所述第二双目摄像头、所述电动闸门、所述分选桶驱动机构中的驱动电机和所述供水控制系统中的阀门及水泵电连接。
9、作为上述智能鱼苗无损分选设备的优选方案,6个所述分选面分别为首尾依次相连的第一分选面、第二分选面、第三分选面、第四分选面、第五分选面和第六分选面,所述第一分选面的分选孔孔径、所述第二分选面的分选孔孔径、所述第三分选面的分选孔孔径、所述第四分选面的分选孔孔径、所述第五分选面的分选孔孔径和所述第六分选面的分选孔孔径依次增大。
10、作为上述智能鱼苗无损分选设备的优选方案,所述第一分选面上的分选孔、所述第二分选面上的分选孔、所述第三分选面上的分选孔、所述第四分选面上的分选孔、所述第五分选面上的分选孔和所述第六分选面上的分选孔均为长条孔。
11、作为上述智能鱼苗无损分选设备的优选方案,所述第一分选面上的分选孔的宽度为3mm,长度为20mm;所述第二分选面上的分选孔的宽度为4mm,长度为30mm;所述第三分选面上的分选孔的宽度为5mm,长度为40mm;所述第四分选面上的分选孔的宽度为6mm,长度为50mm;所述第五分选面上的分选孔的宽度为8mm,长度为60mm;所述第六分选面上的分选孔的宽度为50mm,长度为300mm。
12、作为上述智能鱼苗无损分选设备的优选方案,所述六方分选桶的各个分选面靠近面与面连接处分别设有宽度为1cm~3cm的无孔区域。
13、作为上述智能鱼苗无损分选设备的优选方案,所述入鱼仓的安装高度大于所述出口仓的安装高度;所述鱼苗通道为倾斜布置,所述鱼苗通道的高位端与所述入鱼仓的出口端连接,所述鱼苗通道的低位端伸至所述六方分选桶内。
14、作为上述智能鱼苗无损分选设备的优选方案,所述分选桶驱动机构包括驱动电机、驱动齿轮和从动齿圈,所述从动齿圈固定连接在所述六方分选桶的外侧,所述驱动电机固定在所述机架上,且所述驱动电机的动力输出端与所述驱动齿轮连接,所述驱动齿轮与所述从动齿圈啮合。
15、作为上述智能鱼苗无损分选设备的优选方案,所述六方分选桶的外侧设有从动轴承组,所述出口仓的侧壁上设有与所述从动轴承组滚动配合的从动轨道。
16、作为上述智能鱼苗无损分选设备的优选方案,所述分选仓设有机仓盖,所述机仓盖罩设在所述六方分选桶的外侧。
17、另外,本发明还提供了一种应用上面各项内容所述的基于机器视觉的智能鱼苗无损分选设备的分选方法,其包括以下步骤:
18、s1,打开第一水流喷头,并将所需分选的所有鱼苗倒入入鱼仓中;
19、s2,使用第一双目摄像头识别鱼苗平均长度;
20、s21,通过第一双目摄像头对入鱼仓中的鱼苗进行拍摄,拍摄后的图像通过公式进行切向和径向畸变校正:
21、
22、
23、其中,x1、x2、y1、y2为校正后的坐标,(x,y)为原始坐标,rx、ry表示各方向的焦距,a为径向畸变的精准系数,k1、k2为切向校正系数;
24、s22,对校正之后的图片使用yolov5模型作为鱼苗目标检测和关键点检测,并以鱼嘴、鱼体的鱼鳃、鱼尾根部和鱼尾四个位置作为关键特征点,使用自适应census变换提取图像边缘区域的信息,通过最小生成树mst聚合模型进行代价聚合,mst聚合模型包含自底向上和自顶向下聚合,两次聚合公式如下:
25、
26、其中,分别为叶节点到根节点与根节点到叶节点的聚合结果,s(p,q)为两个节点之间的相似度,集合ch(p)包含像素p的所有子项,公式(4)中的q表示为节点p的子节点,表示为上一个子节点q的聚合结果,公式(5)中的pr(p)为节点p的父节点;
27、最后通过对代价聚合后的代价矩阵采用赢家通吃算法来确定每个像素的最优视差值,由最优视差值组成的视差图即为最优视差图;
28、s23,利用相机参数和视差图,根据三角测量原理计算特征点的三维坐标,根据欧式距离公式(6),分别计算ac、cd和db之间的三维空间中的真实长度:
29、
30、式中,bl为鱼苗两两关键点之间的长度,s、p分别表示两个关键点,x、y、z表示关键点三维空间中的坐标位置;
31、s24,将得到的三个长度相加,即可得到准确的鱼苗真实长度;识别出所有的鱼苗长度后计算出平均值,鱼苗长度小于平均值的鱼苗即需要被分选出来的鱼苗;
32、s3,依据s2步骤中获得的鱼苗平均长度,控制驱动电机,使六方分选桶转动至合适的分选面;其中,六方分选桶具有6个分选面,6个分选面上的分选孔的孔径大小不同;
33、s4,控制电动闸门,打开入鱼仓的出口端,使鱼苗通过鱼苗通道进入分选桶中;
34、s5,控制驱动电机,使六方分选桶进行正反向抖动,抖动幅度应保证鱼苗不能从其它的分选面泄出;同时,依据控制台中提前设置的不同分选面对应的水流流速和强度,控制第二水流喷头,从而适当增加或减少水量;
35、s6,使用第二双目摄像头持续监测六方分选桶内鱼苗分选情况,根据s2步骤中获得的鱼苗平均长度,判断六方分选桶中的鱼苗长度是否大于或等于鱼苗平均长度,如果是,即需要鱼苗分选完成,如果否,则继续分选;
36、s7,当鱼苗分选完成,控制驱动电机,使六方分选桶转动至分选孔孔径最大的分选面,进行泄鱼,将大于或等于鱼苗平均长度的鱼苗或大鱼从出口仓流出。
37、实施本发明提供的一种基于机器视觉的智能鱼苗无损分选设备及方法,与现有技术相比,其有益效果在于:
38、本发明的基于机器视觉的智能鱼苗无损分选设备及方法通过第一双目摄像头能够对入鱼仓中鱼苗进行识别,并获得鱼苗平均长度,根据鱼苗平均长度,通过控制台控制分选桶驱动机构中的驱动电机使得六方分选桶转至适当的分选面,使鱼苗长度小于平均值的鱼苗从该分选面的分选孔中泄出,同时通过第二双目摄像头持续监测六方分选桶内鱼苗分选情况,确保鱼苗分选完全,从而实现鱼苗准确分选自动化,提高分选效率、降低劳动强度;其次,在分选过程中,通过第一水流喷头和第二水流喷头持续喷水,提高鱼苗途径入鱼仓、鱼苗通道、六方分选桶、出口仓及泄鱼通道的平稳性,防止鱼苗因缺水发生应激反应造成损伤,从而减少活体鱼苗损伤率,有效提升养殖效率和产品质量;再有,第一水流喷头和第二水流喷头的水量控制是依据控制台中提前设置的不同分选面对应的水流流速和强度实现的,从而能够根据需要被分选的鱼苗长度,自适应地增加或减少水量,在保证有效减少鱼苗因缺水发生应激反应造成损伤的同时实现水量调控,节约用水。
39、综上,实施本发明的基于机器视觉的智能鱼苗无损分选设备及方法能够模拟人工鱼苗分选过程,减少人工分选时对鱼苗的损伤,解决鱼苗分选不彻底等问题,实现高经济肉食鱼类鱼苗全自动化智能无损分选,从而提高鱼苗养殖产量,增加农民收入,为养殖户带来更好的经济效益。
- 还没有人留言评论。精彩留言会获得点赞!