一种基于视觉识别成熟度的果蔬智能高空采摘车的制作方法
本发明涉及果蔬收获,具体为一种基于视觉识别成熟度的果蔬智能高空采摘车。
背景技术:
1、果蔬智能高空采摘车作为农业现代化的得力助手,其具备强大的升降与伸展功能,轻松抵达各类果树高空区域,智能操控系统精准灵敏,可依据果实分布与成熟度制定最佳采摘路径,机械臂灵活且轻柔,稳稳采撷果蔬,车身稳定装置确保在复杂地形与高空作业时安全无忧,无论是果园还是高大的蔬菜种植区,它都能高效作业,大幅提升采摘效率,减少人力成本。
2、现有公开号为cn210113804u的中国专利,公开了一种高空中小型水果采摘分离车,包括底部安装有万向轮的移动车;所述移动车上安装有一收集箱,收集箱内的底部安装有分拣机构,分拣机构的下方安装有分拣筐;还包括一支撑杆,支撑杆的顶部安装有一用于对果蒂进行剪切的剪刀,支撑杆的底部安装有用于对剪刀进行开合控制的把手;所述剪刀下方的侧部设有一柔性筒袋,柔性筒袋的顶部开口并位于所述剪刀的下方,柔性筒袋的下端开口位于收集箱的顶部;被剪刀剪切后的水果通过柔性筒袋引导至收集箱内的分拣机构中被分拣,水果被分拣机构分拣后掉落至下方的分拣筐内,然而该技术方案在使用时,对成熟果蔬采摘收获时容易将果蔬的枝叶一起框入引导罩中,导致在裁剪果蔬时会附带减去一些树叶,甚至藤蔓、树枝等,对树本身伤害较大,不能做到精确采摘。
3、针对上述问题,为此,提出一种基于视觉识别成熟度的果蔬智能高空采摘车来解决上述问题。
技术实现思路
1、本发明的目的在于提供一种基于视觉识别成熟度的果蔬智能高空采摘车,采用本装置进行工作,从而解决了背景技术中采摘不精确容易对植株本身造成较多伤害以及应对高大粗壮果蔬难以采摘的问题。
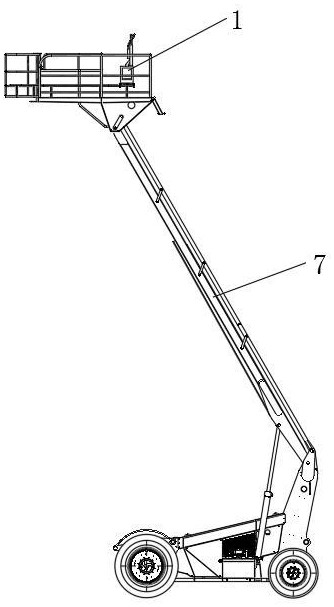
2、为实现上述目的,本发明提供如下技术方案:一种基于视觉识别成熟度的果蔬智能高空采摘车,包括举升车主体,举升车主体上端设置有采摘车主体,采摘车主体内部设置有用于暂存采摘果蔬的收集框,采摘车主体上表面固定连接有用于智能采摘成熟果蔬的采摘机构;
3、采摘机构包括固定连接在采摘车主体上表面的底板,底板上表面固定连接有升降框a,升降框a内部设置有马达a,马达a输出端固定连接有丝杆,丝杆贯穿升降框a内壁,升降框a内壁上端固定连接有顶板,丝杆一端与顶板底面转动连接,升降框a内部滑动连接有升降框b,升降框b两侧均开设有侧槽,顶板滑动连接于侧槽内部,丝杆与升降框b螺纹连接,升降框b上表面固定连接有控制器,升降框b一侧固定连接有工业相机,两组所述侧槽内壁上端均固定连接有安装块,其中一组所述安装块一侧固定连接有电机a,电机a输出端固定连接有转轴a,转轴a外侧固定连接有电动伸缩板,电动伸缩板一端固定连接有用于采摘果蔬的采摘部件。
4、进一步地,采摘部件包括固定连接在电动伸缩板一侧的安装框,安装框内部设置有马达b,马达b输出端固定连接有转轴b,转轴b一端固定连接有支撑盘,支撑盘外侧固定连接有转杆a,转杆a一端与安装框内壁转动连接,支撑盘上表面设置有转动环,转动环上表面固定连接有采摘盘,支撑盘外侧固定连接有侧块,所述侧块共设置有两组,两组所述侧块对称设置,侧块上表面固定连接有电动伸缩杆,电动伸缩杆伸长端固定连接有弧形采摘夹,所述支撑盘、转动环以及采摘盘内部均开设有贯穿槽,转动环内部设置有用于定位果蔬的定位组件。
5、进一步地,弧形采摘夹一侧开设有顶槽,顶槽内部滑动连接有夹刀,夹刀与顶槽内壁之间固定连接有弧形弹簧,顶槽内部设置有气囊,气囊与夹刀底面贴合,气囊一侧贯穿弧形采摘夹内壁,气囊贯穿弧形采摘夹的一侧固定连接有水平压板,弧形采摘夹底面固定连接有限位块,采摘盘上表面开设有限位槽,限位块滑动连接于限位槽内部,转动环内壁固定连接有齿环,支撑盘内部设置有马达c,马达c输出端固定连接短轴,短轴外侧固定连接有齿轮,齿轮与齿环啮合连接。
6、进一步地,转动环与采摘盘之间固定连接有限位环,所述定位组件包括固定连接在限位环内壁顶面的弹簧a,弹簧a地面固定连接有固定环,固定环底面固定连接有环形海绵垫,限位环内部开设有漏液槽外侧开设有排液口,排液口与漏液槽对应设置,限位环内部固定连接有弧形凸块。
7、进一步地,弧形采摘夹内壁固定连接有用于挤压排出果蔬的施压组件,所述施压组件包括固定连接在弧形采摘夹内壁的安装架,安装架底面开设有活动槽a,活动槽a内壁转动连接有连接长杆a,连接长杆a与安装架内壁连接处设置有扭簧,连接长杆a外侧固定连接有磁板,磁板底面固定连接有橡胶压板,橡胶压板倾斜设置,两组所述磁板磁性相斥。
8、进一步地,升降框a一侧固定连接有缓冲盒,缓冲盒底面固定连接有出料斗,安装框底面固定连接有排料斗,排料斗、缓冲盒以及出料斗均为中空结构,排料斗底面与缓冲盒上方开口之间固定连接有缓冲网兜,缓冲盒内壁开设有内槽,内槽内壁转动连接有转杆b,转杆b与缓冲盒内壁连接处设置有扭簧,转杆b外侧固定连接有转板,转板上表面固定连接有缓冲软垫。
9、进一步地,内槽内壁开设有储气槽,转板上表面活动连接有连接短板,连接短板上表面固定连接有密封板,密封板滑动连接于储气槽内部且与储气槽内壁贴合,储气槽一侧开设有排气槽,排气槽开口口径小于储气槽且开口方向与转板上表面对应设置,缓冲盒一侧开设有出料槽,缓冲盒一侧固定连接有杂质盒,出料槽与杂质盒内部连通。
10、进一步地,出料斗底面固定连接有贯穿管,贯穿管贯穿采摘车主体上表面,贯穿管内部开设有排料斜槽,贯穿管底面固定连接有外挡板,外挡板设置于排料斜槽倾斜方向对应的一侧,外挡板底面开设有活动槽b,活动槽b内壁转动连接有连接长杆b,连接长杆b与活动槽b内壁连接处设置有扭簧,连接长杆b外侧固定连接有连接长板,连接长板一侧固定连接有导向板,导向板上表面固定连接有漏槽,收集框内部设置有次果框以及良果框,次果框与漏槽对应设置,良果框与导向板远离连接长板的一端对应设置,收集框外侧铰接有出料门,收集框外侧设置有斜板。
11、进一步地,举升车主体顶端设置有导轨,采摘车主体底面设置有用于让采摘车主体滑动的驱动轮部件,所述驱动轮部件包括固定连接在采摘车主体底面的转向桥架,转向桥架两侧均固定连接有驱动轴,驱动轴一端固定连接有侧盘,侧盘一侧设置有防倾轮组,侧盘一侧还设置有导向轮组,防倾轮组设置于导向轮组上方且分别与导轨的上表面和下表面贴合。
12、进一步地,控制器与工业相机、马达a、电机a、电动伸缩板、电动伸缩杆以及马达c电性连接,所述控制器内部设置有用于控制工业相机对果蔬外表进行拍照的图像采集模块,图像采集模块一端信号连接有用于将采集到的图片信息进行对比的图像处理模块,图像处理模块一端信号连接有用于控制马达a、电机a、电动伸缩板、电动伸缩杆以及马达c进行采摘工作的运动控制模块,图像采集模块另一端还信号连接有用于存储成熟果蔬图片信息的数据存储模块。
13、与现有技术相比,本发明的有益效果如下:
14、本发明提出的一种基于视觉识别成熟度的果蔬智能高空采摘车,通过采摘机构中的采摘部件、施压组件以及定位组件的设置,在采摘过程中通过控制器配合工业相机确定采摘位置,通过马达a、电机a、电动伸缩板以及电动伸缩杆将采摘部件移动至采摘位置,通过弧形采摘夹中间靠拢对果蔬进行夹持,通过挤压气囊将夹刀弹出,同时在马达c作用下采摘盘旋转,夹刀将果茎切断,保证稳定准确切割,同时利用磁板磁性相斥带动橡胶压板斜向下压,将果蔬排出,完成采摘工作,实现了准确稳定地对果蔬进行采摘的目的。
- 还没有人留言评论。精彩留言会获得点赞!