一种自动化芦苇笋剥笋装置的制作方法
[0001]
本实用新型涉及农业机械领域,具体涉及一种自动化芦苇笋剥笋装置。
背景技术:
[0002]
中国发明申请号为201811180636.3的发明申请公开了立式芦苇笋剥笋装置,包括漏斗、齿条带轮机构、喷水管道、滚刀装置、笋箱、两个笋皮收集箱、若干个万向轮、外壳、升降机构、隔板和底盘;该发明通过升降开关控制伸缩推杆的伸缩,从而推动升降支架升降到合适的高度,此后顶盘上的推板推动顶筐旋转到合适的角度放笋;笋通过漏斗中的三个输出口进入进笋口,切削控制开关控制电机启动,电机驱动齿条和带轮运动,进而带动滚刀转动切削笋皮;在切削过程中通过喷水管道的三个喷水口喷水,将附着在滚刀或圆柱体外壳内壁的笋皮冲下,笋皮进入笋皮收集箱中,削好的笋通过笋箱上部的三个输入口进入笋箱,笋箱和笋皮收集箱皆可取出进行取笋和清洁工作;底部的万向轮可以方便装置的移动和摆放。该申请目前存在的缺陷为:1)此技术的芦苇笋剥皮方案可行性存在问题,通过辊刀滚动使笋在下落时候剥皮,需要刀贴合笋并有压力,但笋会下落困难,增加停机清理的频率;2)同时,此技术的弹簧机构对于不同粗细不同弯曲程度的芦苇笋较难适应。3)另外,相同长度的辊刀如果对不同粗细的笋切去同样厚度的皮,将会造成较大的浪费。
[0003]
中国发明申请号为201710484490.0的发明申请公开了一种手摇式双叉小笋剥笋机,包括机壳和机架,所述机壳设置于机架上,所述机架上设有剥笋装置,所述剥笋装置包括剥皮单元、刮皮单元和推送单元,所述剥皮单元设置于机壳上,所述推送单元设置于机架上,所述刮皮单元设置于推送单元上。
[0004]
所述剥笋装置包括剥皮单元、刮皮单元和推送单元,所述剥皮单元设置于机壳上,所述推送单元设置于机架上,所述刮皮单元设置于推送单元上,将小笋放置于推动单元中的定位机构中,由定位机构将小笋定位夹住,然后手动将推送杆推动,然后由推动杆带动横杆、定位结构和导向机构至第一剥壳叉和第二剥壳叉的一侧,使第一剥壳叉上的剥壳杆二、第二剥壳叉的上的剥壳杆一的上端刺破小笋的笋壳,然后转动摇手,摇手使转动轴一和转动轴二转动,从而带动第一剥壳叉和第二剥壳叉转动,此时笋壳就随着第一剥壳叉和第二剥壳叉的转动从而缠绕到第一剥壳叉和第二剥壳叉上,从而达到了剥除小笋笋壳的目的,剥除笋壳后的小笋从导向机构中滑出,缠绕在第一剥壳叉和第二剥壳叉表面的笋壳由刮皮机构刮除。该申请目前存在的缺陷为:1)现有技术仍然需要人工持续参与,操作过程费力。2)通过实验发现,现有机械剥笋后,笋上仍有笋皮残余,笋前部经常折断。3)剥壳叉在笋上的插入位置不能确定,不精准。4)现有技术是针对小竹笋的,对于芦苇笋剥皮没有进行分析。
[0005]
现有技术在芦苇笋去皮这个问题上存在可行性和适应性的问题,而手摇剥笋机虽然实现剥笋但仍需要大量人力投入。该发明解决的问题是如何自动化剥芦苇笋,从而实现减少芦苇笋去皮过程中的人工投入,高质量高效剥笋的目的。
[0006]
人剥笋过程包括,用刀划开笋皮,双手从切缝处将笋皮剥去。而手摇式剥笋机的工
作过程包括:(1)将笋手动放在喂入卡槽上,抓住卡槽将笋推向剥笋叉,剥笋叉叉住笋头前部,过程中去笋皮的弹片穿过剥笋叉;(2)手摇把手,剥笋叉在齿轮啮合的带动下转动,笋皮卷在剥笋叉上,去除笋皮的笋向前运动。(3)将卡槽向外推出,去笋皮的弹片刮去笋皮。
技术实现要素:
[0007]
本实用新型的目的是提出一种实现减少芦苇笋去皮过程中的人工投入,高质量高效剥笋的自动化芦苇笋剥笋装置。
[0008]
为了实现上述目的,本实用新型提供了如下技术方案:
[0009]
一种自动化芦苇笋剥笋装置,包括:电机支架1、电机2、电机联轴器3、框架17、芦苇笋输送带25;
[0010]
电机联轴器3的上端连接电机2的输出轴,电机2固接在电机支架1上,电机支架1连接在框架17的上端;
[0011]
框架17包括四根竖直支架、沿竖直方向固定在竖直支架上的由上向下水平设置的顶层和中间层;
[0012]
芦苇笋输送带25布置在框架17的底部,并且与框架17垂直;
[0013]
所述装置还包括:第一阶梯轴4、法兰轴承支座5、顶层轴承座支撑板6、第一齿轮7、推力轴承8、夹层轴承支持板9、第一带花键的万向节联轴器组10、第一机械爪11、第一剥笋叉组件12、导轨固定板13、导轨14、导轨滑块15、机械爪托架16、电动推杆18、第二阶梯轴19、电动推杆固定板20、剥笋叉联轴器21、剥笋叉22、第二齿轮23、第二带花键的万向节联轴器组24、第二剥笋叉组件26和第二机械爪27;其中,
[0014]
第一阶梯轴4和第二阶梯轴19在芦苇笋输送带25两侧对称布置,第一阶梯轴4和第二阶梯轴19分别包括位于上部的大端和位于下部的小端;
[0015]
顶层轴承座支撑板6固定在框架17的顶层,夹层轴承支持板9固定在框架17的中间层;
[0016]
第一阶梯轴4和第二阶梯轴19的大端通过固定于顶层轴承座支撑板6上的法兰轴承支座5可转动地穿过顶层轴承座支撑板6,第一阶梯轴4和第二阶梯轴19的小端可转动地穿过夹层轴承支持板9;
[0017]
第一阶梯轴4的顶端通过键槽连接电机联轴器3;
[0018]
第一齿轮7和第二齿轮23位于夹层轴承支持板9上方,其中,第一齿轮7和第二齿轮23分别通过位于夹层轴承支持板9上的推力轴承8连接于第一阶梯轴4和第二阶梯轴19的大端的底部;第一齿轮7和第二齿轮23为相同结构的齿轮,第一齿轮7和第二齿轮23相互啮合;
[0019]
第一阶梯轴4和第二阶梯轴19的小端的底部分别和第一带花键的万向节联轴器组10和第二带花键的万向节联轴器组24的上端过盈连接;
[0020]
第一带花键的万向节联轴器组10和第二带花键的万向节联轴器组24的下端分别与第一剥笋叉组件12和第二剥笋叉组件26的上端连接;第一剥笋叉组件12和第二剥笋叉组件26穿过第一机械爪11和第二机械爪27的爪孔,并与所述爪孔间隙配合;
[0021]
芦苇笋输送带25每侧的两根竖直支架之间沿竖直方向设有导轨14;导轨14通过导轨固定板13固定在竖直支架上;芦苇笋输送带25两侧的两个导轨滑块15分别可滑动地设置在导轨14上;
[0022]
机械爪托架16包括相对于芦苇笋输送带25两侧对称布置的两侧板和水平连接板,两侧板分别通过螺钉连接在两个导轨滑块15上,水平连接板连接两侧板,水平连接板上对应于芦苇笋输送带25上方设有开口;
[0023]
第一机械爪11和第二机械爪27分别包括机械爪架111、爪112和舵机113,两个爪112滑动设置在机械爪架111的前端面,舵机113能够带动两个爪112沿相对或相反方向运动,机械爪架111通过布置在其下端面的舵机113与机械爪托架16的水平连接板的上端面固接;
[0024]
电动推杆18包括推杆电机和推杆,电动推杆18的上端通过电动推杆固定板20固接在框架17的顶层,推杆的下端固接在机械爪托架16的水平连接板上;
[0025]
第一剥笋叉组件12和第二剥笋叉组件26分别包括剥笋叉联轴器21和剥笋叉22,两个剥笋叉联轴器21的上部分别和第一带花键的万向节联轴器组10或第二带花键的万向节联轴器组24连接,剥笋叉联轴器21的下部设有成对螺纹孔,每个剥笋叉联轴器21的下部通过所述螺纹孔固定有两个剥笋叉22;剥笋叉22穿过机械爪托架16的水平连接板的开口;
[0026]
控制机构布置在剥笋装置外部,与电机2、舵机113和推杆电机电连接,通过电信号控制上述电机2、舵机113和推杆电机运动。
[0027]
与现有技术相比,本实用新型的有益效果在于:
[0028]
1)可以减少剥笋过程需要的人工成本,通过自动化的剥笋流程,减少工作人员的参与。
[0029]
2)可以提高剥笋的效果,高质量剥笋,通过机械爪等条件剥笋叉的间距,可以适合不同粗细,不同弯曲程度的笋。
[0030]
3)可以提高剥笋的效率,通过改变运动形式,让笋在传送带带动下前进,剥笋叉向笋移动,减少笋变化位置对工作效率的影响。
[0031]
4)自动化剥笋机改变笋靠近剥笋叉为剥笋叉叉向笋,动作直接,可以适用于传送带场景。
附图说明
[0032]
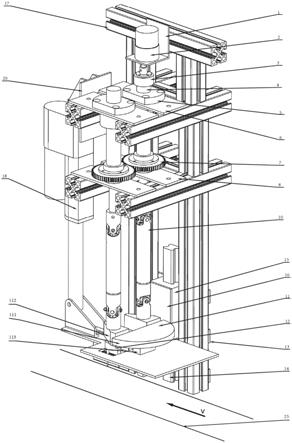
图1是本实用新型的一种自动化芦苇笋剥笋装置的结构示意图;
[0033]
图2是沿图1中c-c线的剖视图;
[0034]
图3是本实用新型的一种自动化芦苇笋剥笋装置的剥笋叉的结构示意图;
[0035]
图4是本实用新型的一种自动化芦苇笋剥笋装置的细节图;
[0036]
图5是本实用新型的一种自动化芦苇笋剥笋装置的立体图。
[0037]
其中的附图标记为:
[0038]
1电机支架
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
2电机
[0039]
3电机联轴器
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
4第一阶梯轴
[0040]
5法兰轴承支座
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
6顶层轴承座支撑板
[0041]
7第一齿轮
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
8推力轴承
[0042]
9夹层轴承支持板
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
10第一带花键的万向节联轴器组
[0043]
11第一机械爪
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
12第一剥笋叉组件
[0044]
13导轨固定板
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
14导轨
[0045]
15导轨滑块
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
16机械爪托架
[0046]
17框架
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
18电动推杆
[0047]
19第二阶梯轴
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
20电动推杆固定板
[0048]
21剥笋叉联轴器
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
22剥笋叉
[0049]
23第二齿轮
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
24第二带花键的万向节联轴器组
[0050]
25芦苇笋输送带
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
26第二剥笋叉组件
[0051]
27第二机械爪
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
111机械爪架
[0052]
112爪
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
113舵机
具体实施方式
[0053]
下面结合附图和实施例对本实用新型进行进一步说明。
[0054]
如图1~图5所示,一种自动化芦苇笋剥笋装置包括:电机支架1、电机2、电机联轴器3、第一阶梯轴4、法兰轴承支座5、顶层轴承座支撑板6、第一齿轮7、推力轴承8、夹层轴承支持板9、第一带花键的万向节联轴器组10、第一机械爪11、第一剥笋叉组件12、导轨固定板13、导轨14、导轨滑块15、机械爪托架16、框架17、电动推杆18、第二阶梯轴19、电动推杆固定板20、剥笋叉联轴器21、剥笋叉22、第二齿轮23、第二带花键的万向节联轴器组24、芦苇笋输送带25、第二剥笋叉组件26和第二机械爪27。
[0055]
框架17包括四根竖直支架、沿竖直方向固定在竖直支架上的由上向下水平设置的顶层和中间层。
[0056]
如图5所示,芦苇笋输送带25布置在框架17的底部,并且与框架17垂直,v方向为笋的喂入运动方向。
[0057]
第一阶梯轴4和第二阶梯轴19在芦苇笋输送带25两侧对称布置。第一阶梯轴4和第二阶梯轴19分别包括位于上部的大端和位于下部的小端。
[0058]
顶层轴承座支撑板6通过螺钉固定在框架17的顶层,夹层轴承支持板9通过螺钉固定在框架17的中间层。
[0059]
第一阶梯轴4和第二阶梯轴19的大端通过固定于顶层轴承座支撑板6上的法兰轴承支座5可转动地穿过顶层轴承座支撑板6,第一阶梯轴4和第二阶梯轴19的小端可转动地穿过夹层轴承支持板9。
[0060]
第一阶梯轴4的顶端通过键槽连接电机联轴器3,电机联轴器3的上端通过销钉连接电机2的输出轴,电机2固接在电机支架1上,电机支架1通过螺钉连接在框架17的上端。
[0061]
第一齿轮7和第二齿轮23位于夹层轴承支持板9上方,其中,第一齿轮7和第二齿轮23分别通过位于夹层轴承支持板9上的推力轴承8连接于第一阶梯轴4和第二阶梯轴19的大端的底部。第一齿轮7和第二齿轮23为相同结构的齿轮,第一齿轮7和第二齿轮23相互啮合。
[0062]
第一阶梯轴4和第二阶梯轴19的小端的底部分别和第一带花键的万向节联轴器组10和第二带花键的万向节联轴器组24的上端过盈连接。
[0063]
第一带花键的万向节联轴器组10和第二带花键的万向节联轴器组24的下端分别与第一剥笋叉组件12和第二剥笋叉组件26的上端通过销钉连接。第一剥笋叉组件12和第二剥笋叉组件26穿过第一机械爪11和第二机械爪27的爪孔,并与所述爪孔间隙配合。
[0064]
芦苇笋输送带25每侧的两根竖直支架之间沿竖直方向设有导轨14。导轨14通过导
轨固定板13固定在竖直支架上。芦苇笋输送带25两侧的两个导轨滑块15分别可滑动地设置在导轨14上。
[0065]
机械爪托架16包括相对于芦苇笋输送带25两侧对称布置的两侧板和水平连接板,两侧板分别通过螺钉连接在两个导轨滑块15上,水平连接板连接两侧板,水平连接板上对应于芦苇笋输送带25上方设有开口。
[0066]
第一机械爪11和第二机械爪27分别包括机械爪架111、爪112和舵机113,两个爪112滑动设置在机械爪架111的前端面,舵机113能够带动两个爪112沿相对或相反方向运动,机械爪架111通过布置在其下端面的舵机113与机械爪托架16的水平连接板的上端面固接。
[0067]
电动推杆18包括推杆电机和推杆,电动推杆18的上端通过电动推杆固定板20固接在框架17的顶层,推杆的下端固接在机械爪托架16的水平连接板上。推杆电机驱动推杆运动,进一步带动机械爪托架16上下运动。
[0068]
其中,电机2、第一带花键的万向节联轴器组10、第一机械爪11、电动推杆18、第二带花键的万向节联轴器组24、第二机械爪27均为市场可以直接购买的组件,第一带花键的万向节联轴器组10和第二带花键的万向节联轴器组24具有上下移动、不同轴传动的功能。
[0069]
如图3所示,第一剥笋叉组件12和第二剥笋叉组件26分别包括剥笋叉联轴器21和剥笋叉22,两个剥笋叉联轴器21的上部分别和第一带花键的万向节联轴器组10或第二带花键的万向节联轴器组24通过销钉连接,剥笋叉联轴器21的下部设有成对螺纹孔,每个剥笋叉联轴器21的下部通过所述螺纹孔固定有两个剥笋叉22。剥笋叉22穿过机械爪托架16的水平连接板的开口。
[0070]
控制机构布置在剥笋装置外部,与电机2、舵机113和推杆电机电连接,通过电信号控制上述电机2、舵机113和推杆电机运动。
[0071]
本实用新型的自动化剥笋机的工作过程为:
[0072]
1、剥笋叉22下降,叉住芦苇笋;
[0073]
电机2开始转动,电机2通过电机联轴器3连接第一阶梯轴4,第一阶梯轴4通过第一齿轮7和第二齿轮23的啮合传动,带动连接第一剥笋叉组件12的第一带花键的万向节联轴器组10和连接第二剥笋叉组件26第二带花键的万向节联轴器组24,第一剥笋叉组件12和第二剥笋叉组件26转动,调整第一剥笋叉组件12和第二剥笋叉组件26的四个剥笋叉22的位置,使得四个剥笋叉22位于同一平面,所述平面与芦苇笋输送带25垂直。在这个位置,位于内侧两个剥笋叉22位于待处理的芦苇笋的笋皮上方。
[0074]
电动推杆18带动机械爪托架16下降,由于第一带花键的万向节联轴器组10和第二带花键的万向节联轴器组24的花键套筒可以伸缩,机械爪托架16进而带动第一机械爪11和与其连接的第一剥笋叉组件12以及第二机械爪27和与其连接的第二剥笋叉组件26向下拉动,位于内侧的两个剥笋叉22叉住笋皮。电动推杆18的下降、上升距离可以定量设置,从而做到精准控制机械爪托架16的上下移动。
[0075]
2、剥笋叉22转动,剥去笋皮,笋向前运动;
[0076]
芦苇笋输送带25带动芦苇笋沿笋的喂入运动方向v运动。电机2转动,电机2通过电机联轴器3连接第一阶梯轴4,第一阶梯轴4通过第一齿轮7和第二齿轮23的啮合传动,带动连接第一剥笋叉组件12的第一带花键的万向节联轴器组10和连接第二剥笋叉组件26的第
二带花键的万向节联轴器组24,第一剥笋叉组件12和第二剥笋叉组件26转动剥去笋皮。
[0077]
通过控制机构设定第一剥笋叉组件12和第二剥笋叉组件26的转动时间,时间为笋极限尺寸可以通过的最长时间。
[0078]
芦苇笋的形状为锥形,由于不同品种、批次和不同收割方式,形状存在差异,一般为前部较小,后部较大,粗细为2-3cm、锥度为2-6
°
、长度为30cm左右。通过控制机构调整剥笋叉22张开的速度,以适应不同的芦苇笋的形状。
[0079]
第一机械爪11和第二机械爪27的爪112在第一剥笋叉组件12和第二剥笋叉组件26转动的同时,在舵机113的带动下缓慢分开,剥笋叉联轴器21和第一机械爪11和第二机械爪27的两个爪112同轴配合,剥笋叉联轴器21在第一机械爪11和第二机械爪27带动下,缓慢分开,从而使剥笋叉22主动适应笋的形状。
[0080]
3、剥笋叉22上升,刮去叉上笋皮。
[0081]
电动推杆18带动机械爪托架16上升,电机2带动第一剥笋叉组件12和第二剥笋叉组件26反向旋转去除笋皮,工作回到初始状态。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1